注意) 日本国内では使用できないパーツや使用するにあたって無線免許などが必要なパーツの情報が含まれている可能性がありますので予めお断りしておきます。
ちょっと気になるパーツがいくつかあってブラシモーターの小型機、Tinywhoopなスタイルの機体を2機作ることにしました。一機目はBETAFPVのパーツを中心とした構成の8520モーター搭載の室内機としてはやや大きめの機体です。
[ 部品構成 ]
FC : F4 Brushed Flight Controller (Frsky Rx + OSD)
Camera + VTX : Z02 AIO Camera 5.8G VTX
Frame : 85mm Micro Whoop Frame for 8.5x20mm Motors
Prop : 48mm 3-blade Micro Whoop Propellers
Canopy : Canopy for Tiny Whoop Quads
Motors : Ryze TechのトイドローンTelloから外した8520モーター、詳細は不明だが力強い
Battery : 手持ちの450mAhのLipo
と、モーターと電池以外はすべてBetaFPVで統一してみました。
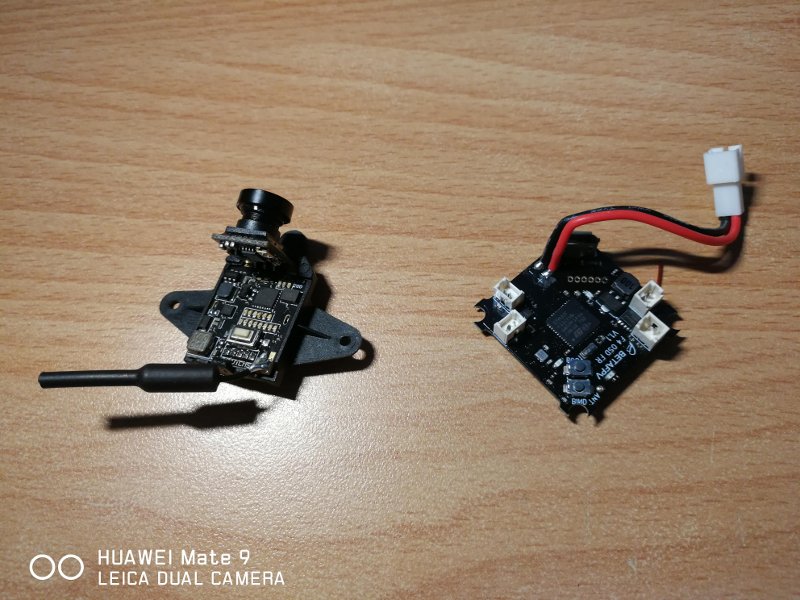
[ FCの特徴 ]
– TinyながらF4プロセッサー搭載
– OSD搭載
– SPI接続でFrskyレシーバーを搭載しているのでtelemetryも使える
[ Camera + VTXの特徴 ]
– Smart Audio機能搭載
– 上のFCにコネクターを建てるとダイレクトに接続出来る
– マウントも付属しているので手間いらず
最近、OpenTXユーザーとなったわたしにとってはTinyながらTelemetryが使えることにOSDよりも興奮します。正確なRSSIが得られますし、バッテリーの電圧値を送信機に喋らせることが出来ます。Smart AudioもあるのでVTXの設定もLua Scriptで済ませられると考えるだけでわくわくします。
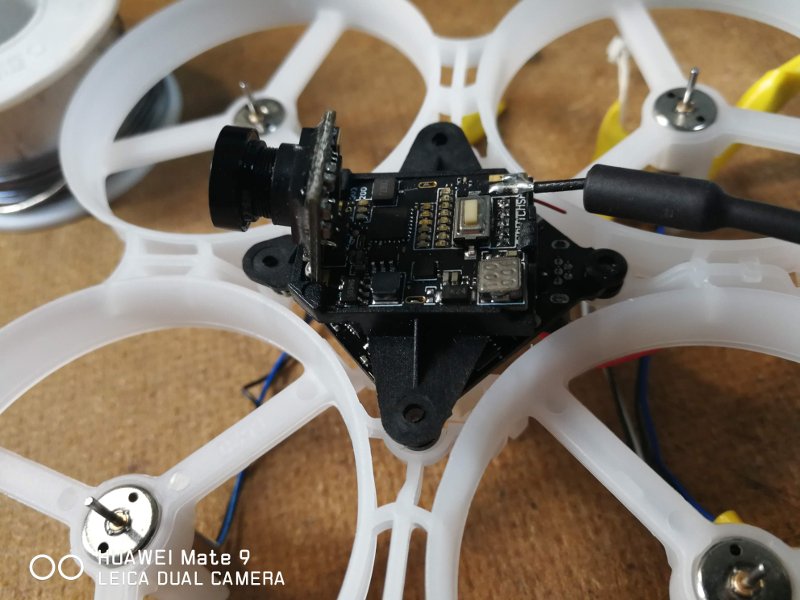
FCとCamera+VTXをコネクターで接続すると、あとはフレームに載せてモーターを接続するだけで飛びます。リード線を引き回すなんてことが必要ないスマートな構成です。
[ 設定 ]
Betaflight 3.5を導入して、ごくごく普通に設定しました。
– Receiver : 基本設定で、受信機モードを”SPI受信サポート”、SPIバス受信プロトコルを”FRSKY_X”にします
– Smartaudio : ポートにてUART2をTBS SmartAudioに設定します
PIDとRateは例によってPROJECT MOCKINGBIRD v1.1b準拠にしました。フィルターその他は変更していません。
[ バインド ]
電池をつないでからバインドボタンを押せば良いようです。よくあるようにボタンを押しながら電源をつなぐというような苦労は要らないみたいです。
[ 飛びっぷり ]
今どきのBetaflightでコントロールするFCでは飛び方に不安はありません。Mockingbirdの設定を施す前でも、十分に安定していました。8520モーターは力強いです。これでブザーが付いていれば屋外でもばんばん飛ばすかも知れません。
不具合というか、おそらくはハズレFCを引いてしまったのだと思いますが、連続して飛行していると時々FCが暴走します。暴走すると、テレメトリーが失われたと送信機が話し、コントロールを失い、モーターが回りっぱなしになります。このため、ちょっと屋外飛行を躊躇しています。

no comment untill now