珍しく購入したRekon4 LR PNP、最初はなるべく箱出しの状態で飛ばしていましたが、少しだけ改造を始めました。
[ Barometer追加 ]
Matekの気圧式高度計をI2C接続しました。GPSでも高度は分かりますが、高度計を使った方がより精度の高い高度が得られるとどこかで読みました。たまたま気圧式高度計を持っていたので接続してみました。本当に精度が良くなったのかどうかまでは確認してません。
[ Caddx Vistaのアンテナを交換 ]
HGLRCの長いアンテナが指で弾くとボヨンボヨンします。最初、機体のバウンスバックの原因かと思いました。実際は違いましたが、やはりボヨンボヨンと揺れるのは有害振動に違いないのでSMAコネクターを取り付けてTBS Triumph Pro Long Rangeを装着することにしました。アンテナが取り外し可能になったので可搬性も向上しました。
[ RPMフィルターを設定 ]
BLHeli_sということもあり出荷時はRPMフィルターは設定されていません。ファームウェアをJESCにしてRPMフィルターを設定しました。合わせてフィルター自体の設定を積極的なものにしてみました。かなり効果的でした。ここではRoll Gyroだけみてみます。
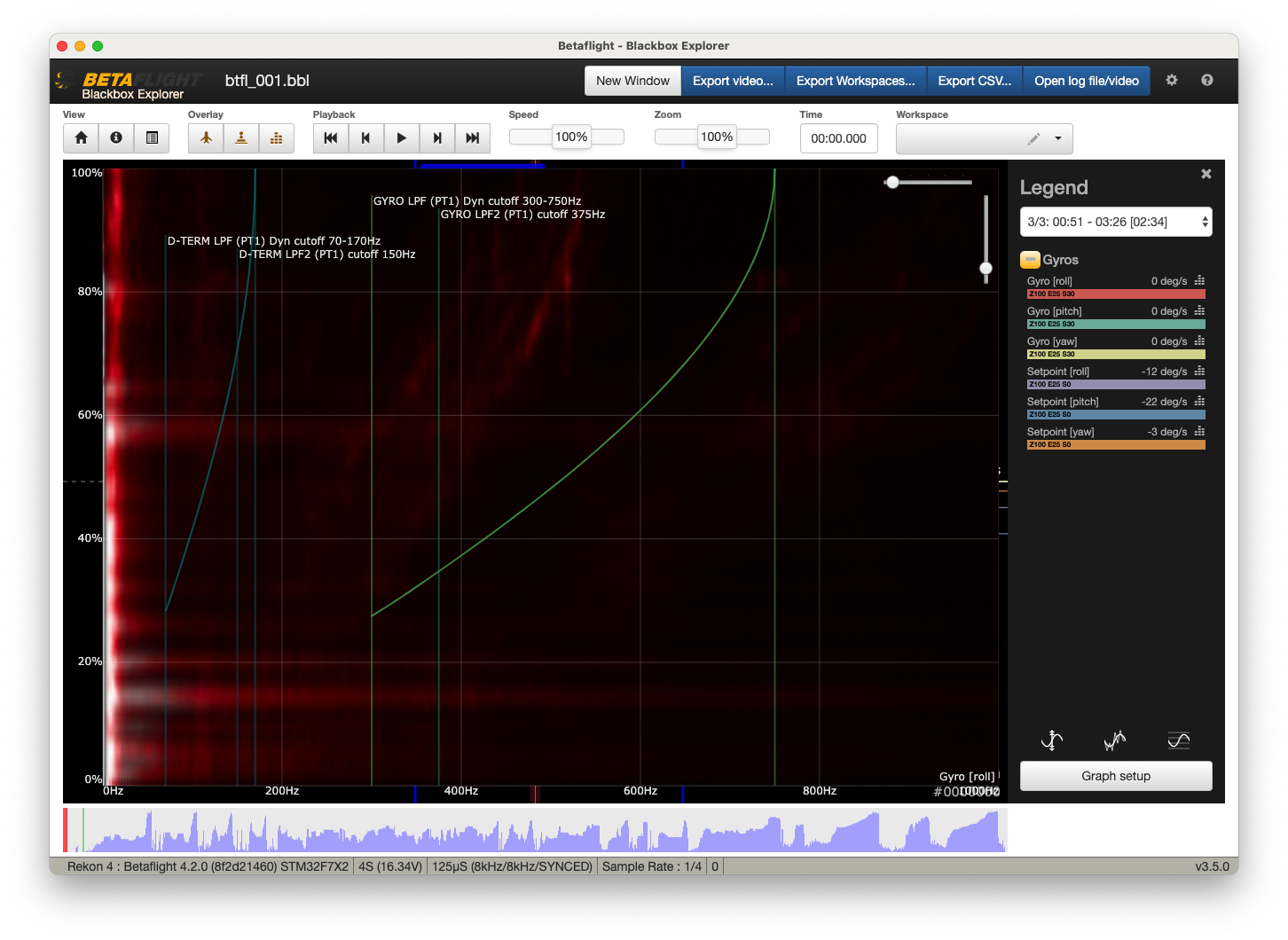
上が出荷時の設定で飛ばした時のものです。スロットルに合わせて移動するモーターノイズが薄く見えています。下がRPMフィルター設定後です。
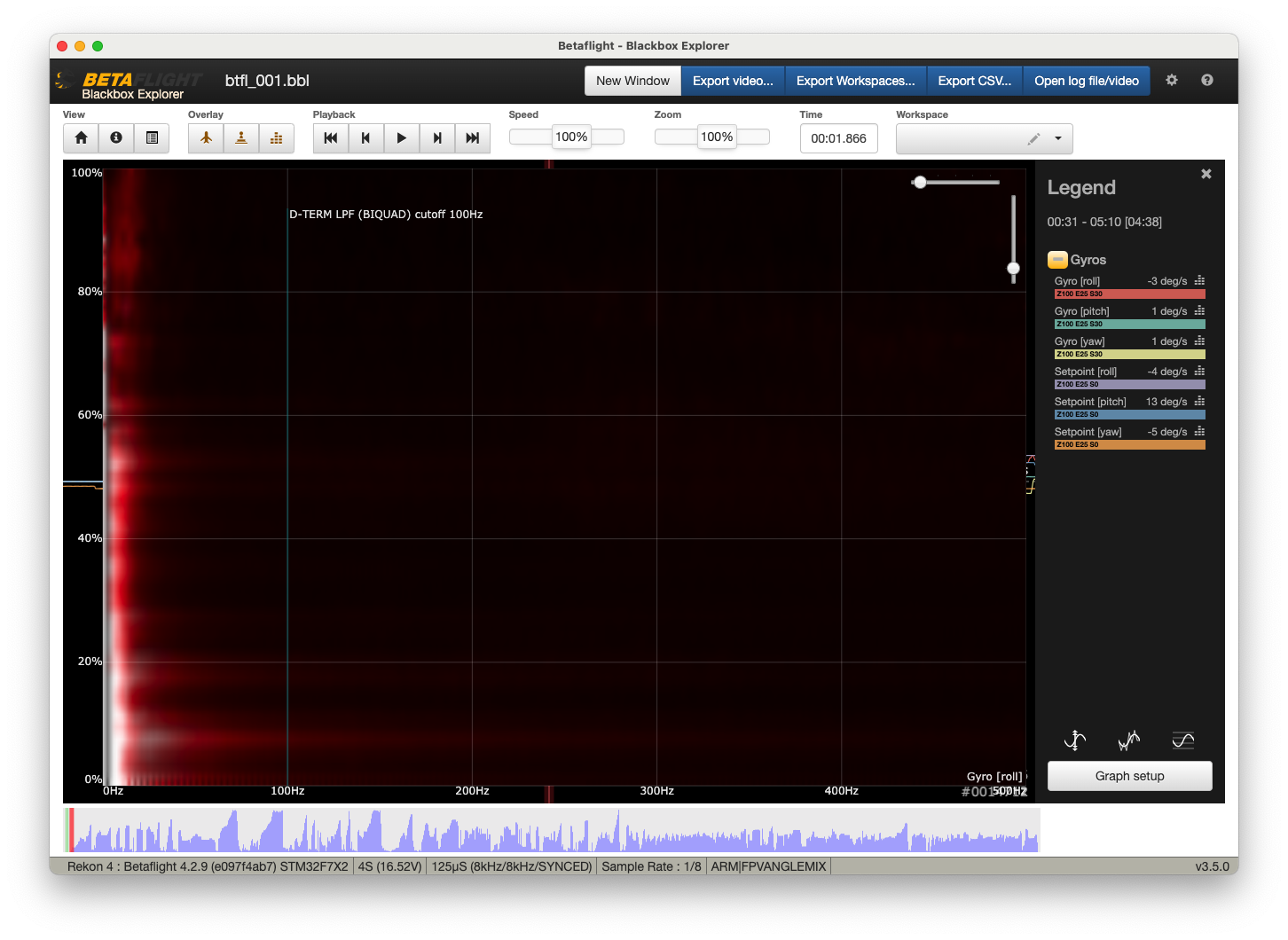
あまりにノイズが少ないためかオリジナルのヒートマップとスケールが変わってしまっていることに注意してください。
[ PIDをえいやで設定 ]
ロール、フリップの後に激しく揺れるのが最初は長いアンテナに原因があるかと思いました。SMAコネクターを付けたので短いアンテナで試してみましたが全く改善しませんでした。Twitterで、やはりそれはバウンスバックだろうとの指摘もありPIDを変更することにしました。確かにIがかなり高くなっているのは、ちょっと怪しいです。
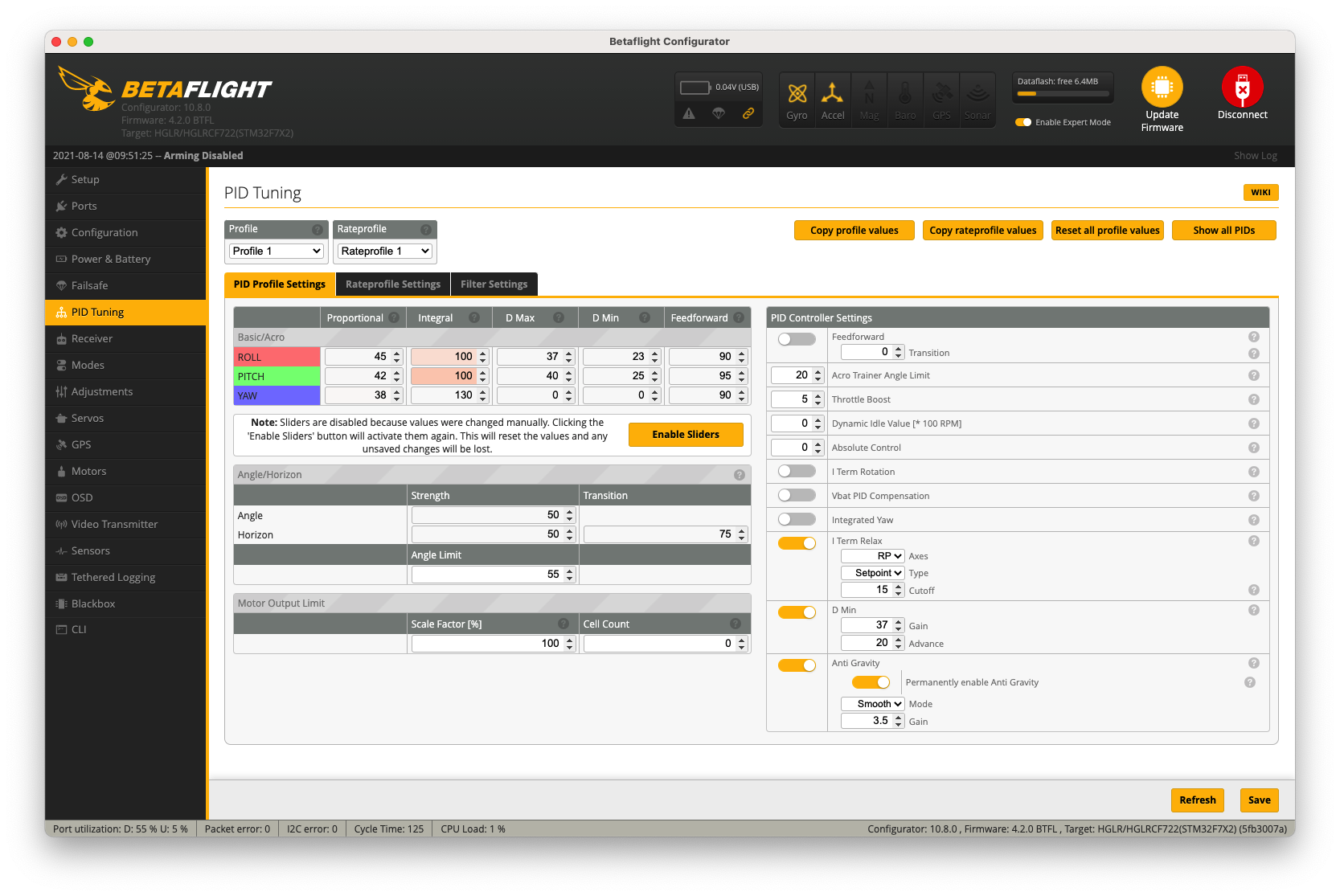
上のような設定で出荷されてきました。
とりあえずスライダーを有効にして、PIDを既定値に戻し他の小さいドローンで設定しているのと同じくPDゲインをやや強めに設定してみたら、ほぼバウンスバックが気にならない状態になりました。ログ的にはまだオーバーシュート気味なので今後詰めていきます。
no comment untill now