半年くらい前に不調になったMac miniの代わりにIntel NUCを導入して快適にWindows生活を送っています。ただ同じ部屋で使用している他のデバイスでは電波に不足がないのにIntel NUCは今一つアンテナの勢いが悪いです。実用上問題はないと思いますが改善を試みてみました。
ググってみて分かったのは同じことを考えて外部アンテナ用のコネクターを取り付けている人たちが少なからず居るということでした。ということで、事例は沢山見つかりますが日本語での事例として書いておきます。

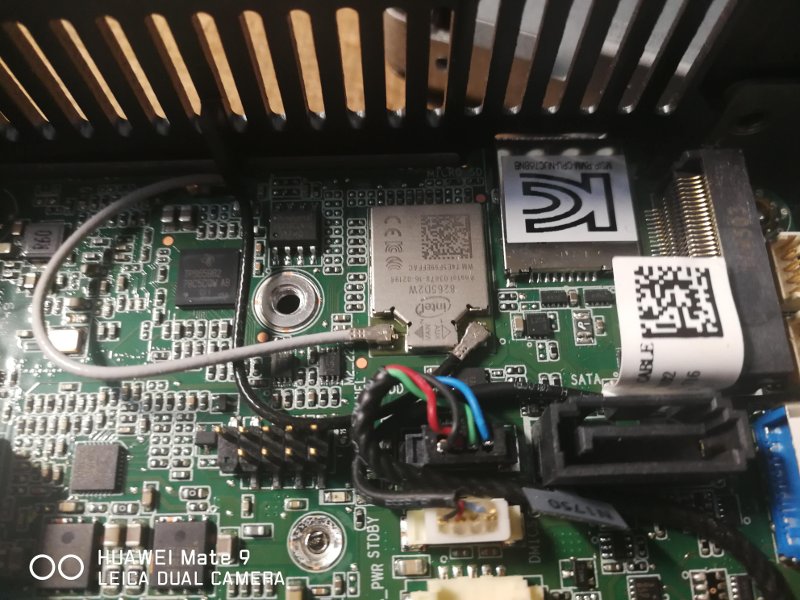
準備するのはMHF4という小さなコネクターとSMAコネクターが付いている細い同軸ケーブルです。重要なのはMHF4コネクターで、これがNUCの基盤側に刺さります。似たような形状で少し大きいものもありますので要注意です。もう一方のコネクターは使用するアンテナに合わせて準備します。SMAコネクターでもアンテナ側がオスだったりメスだったりします。

手順は難しくはなくNUCの裏蓋を開けて、HDDとSSDを外すとWiFiモジュールとアンテナコネクターが見えます。アンテナはMAINとAUXがあります。わたしはMAINだけを外に引き出しました。コネクターをケースに取り付けると美しいですが、持ち歩くわけでもないのでカバーのスリットからケーブルを引き出すようにしました。

効果の確認はコマンドnetsh wlan show interfaceで電波の強度をみて行いました。
オリジナル
Signal : 56%
外部アンテナ
Signal : 80%
Signalは間違いなく強くなったので、とりあえずは成功したのだと思います。
注意) 日本国内では使用できないパーツや使用するにあたって無線免許などが必要なパーツの情報が含まれている可能性がありますので予めお断りしておきます。
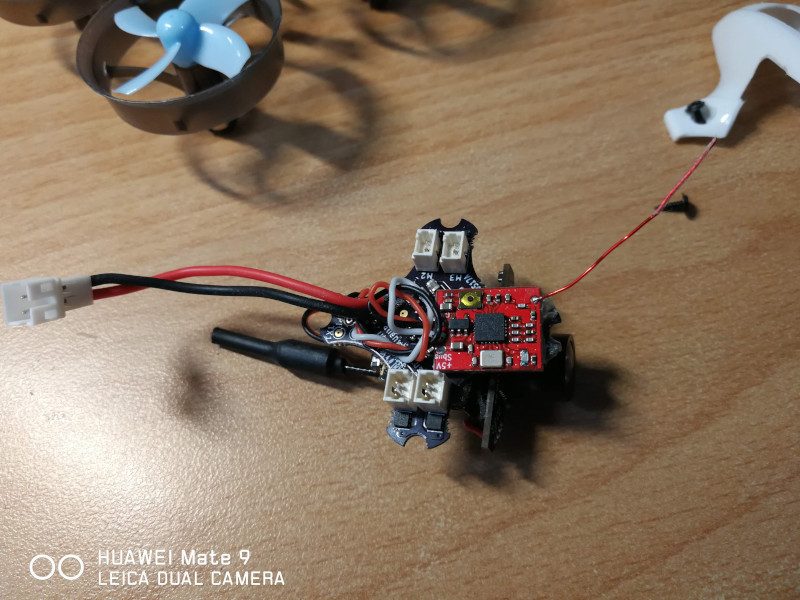
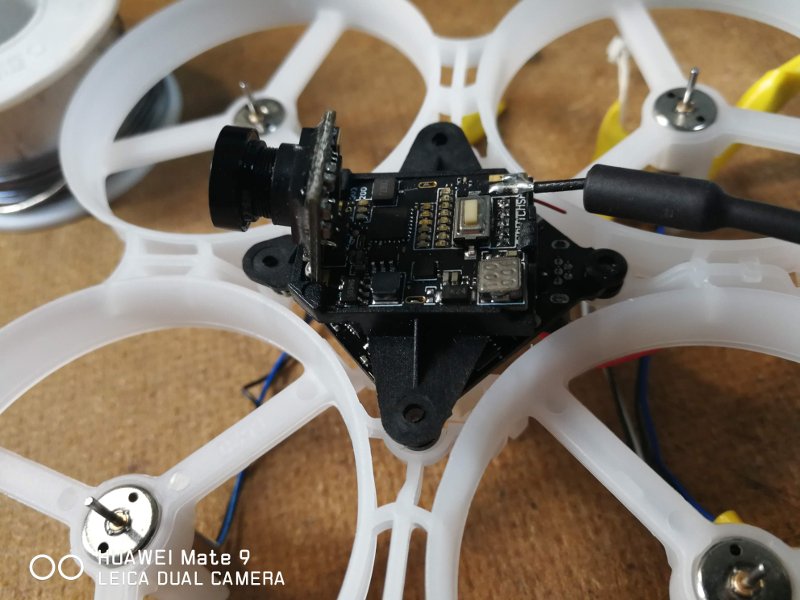
今月作った二機目の室内小型機はAlienWhoop ZER0 (zeroにあらず)というFCを使うことを目的としています。十字型にカットされ、如何にも軽量化の主張が強いFCですので、ここは軽量かつパワフルな機体を目指すことにしました。
[ 部品構成 ]
FC : AlienWhoop ZER0 Brushed Flight Controller
Camera + VTX : TBS UNIFY NANO + TINYCAM COMBO
Frame : COCKROACH SUPER-DURABLE FRAME
Prop : TBS X TINYWHOOP BRUSHED RACE PROPS
Motors : TBS MICRO BRUSHED MOTORS (0617 / 21000KV)
Battery : 300mAh 1S 30C HV Battery
Receiver : Griffon fpv 8ch frsky micro receiver v1.0
Canopy : Tiny7の物をカットして使用
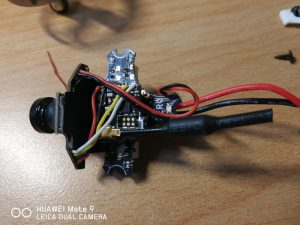
受信機は下側に貼り付けた
ZER0を受け取って最初に気づいたのがUSBコネクターが無いことでした(<-スペックとか読まずに買ったやつです)。カスタムファームウェアをフラッシュする場合は別として、基本的にはFC側では設定することは何もありません。そのためFC側の期待するチャネル設定を送信機側で行う必要があります。詳しくは説明を読んでもらうしかありません。説明書によるとCH5がArm/Disarm, CH6がlevel modeになっていて、CH7, CH8はオプショナルと書かれています。しかし、私の場合CH8まできっちり設定しないとLevel modeにすることが出来ませんでした。
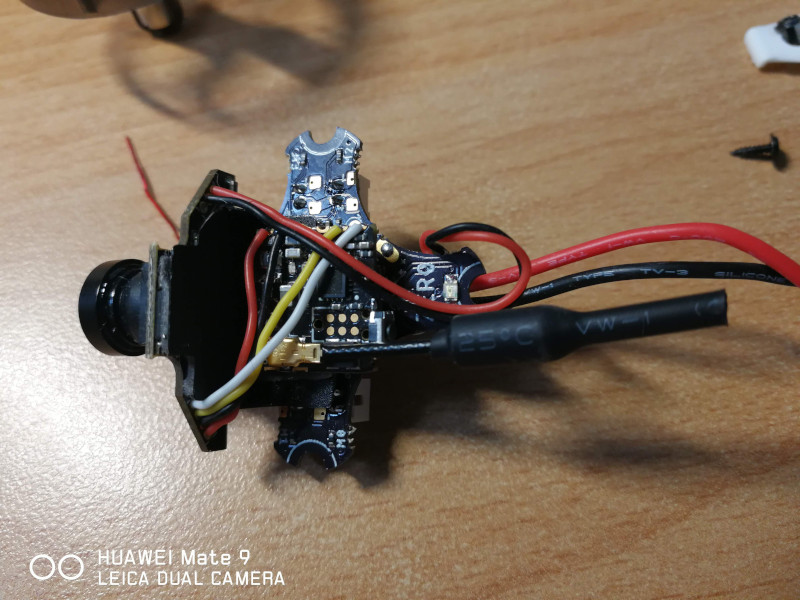
Camera+VTXを載せたところ
CameraとVTXは両面テープで貼り付けられて一体化されています。Smart Audioの機能もありますが、この構成では使いません。FCへの取り付けも付属の両面テープで貼り付けるだけです。

カメラの位置が低いのでBetaFPVのキャノピーは使えません。最初、キャノピー無しで飛ばしてみましたが、フレームの柔軟性が高いのでクラッシュすると、どうしてもFCがネジから外れてしまいます。それを防止するためと、VTX部分の保護、VTXアンテナの固定のためにTiny7用のキャノピーの前部をカットして載せてみました。

総重量は28.8gでした。我が家の最軽量であるInduxtrix FPVより、1g強重くなりました。モーターも電池も大きいので、これは致し方なし。
飛びっぷりは、すこぶる軽快です。電池が満タンの時は、ややスロットル操作が難しい気もしますが、安定しています。小さいので部屋の中でぐるぐる旋回出来ます。Race modeというのも面白いです。エルロンはlevel modeのように自動復帰しますがエレベーターはAcro modeと同じになります。これでしばらく練習してみようて思います。
注意) 日本国内では使用できないパーツや使用するにあたって無線免許などが必要なパーツの情報が含まれている可能性がありますので予めお断りしておきます。
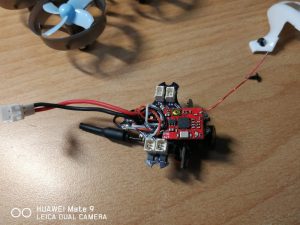
ちょっと気になるパーツがいくつかあってブラシモーターの小型機、Tinywhoopなスタイルの機体を2機作ることにしました。一機目はBETAFPVのパーツを中心とした構成の8520モーター搭載の室内機としてはやや大きめの機体です。

[ 部品構成 ]
FC : F4 Brushed Flight Controller (Frsky Rx + OSD)
Camera + VTX : Z02 AIO Camera 5.8G VTX
Frame : 85mm Micro Whoop Frame for 8.5x20mm Motors
Prop : 48mm 3-blade Micro Whoop Propellers
Canopy : Canopy for Tiny Whoop Quads
Motors : Ryze TechのトイドローンTelloから外した8520モーター、詳細は不明だが力強い
Battery : 手持ちの450mAhのLipo
と、モーターと電池以外はすべてBetaFPVで統一してみました。
[ FCの特徴 ]
– TinyながらF4プロセッサー搭載
– OSD搭載
– SPI接続でFrskyレシーバーを搭載しているのでtelemetryも使える
[ Camera + VTXの特徴 ]
– Smart Audio機能搭載
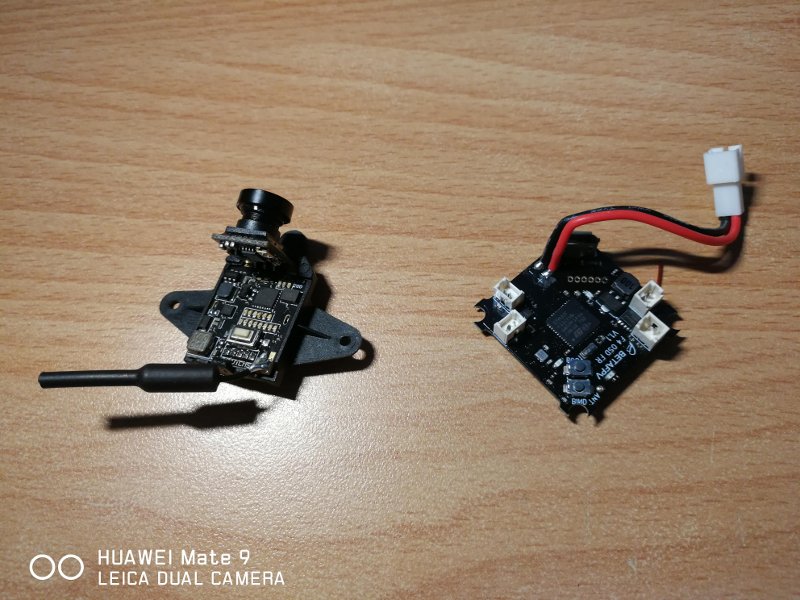
– 上のFCにコネクターを建てるとダイレクトに接続出来る
– マウントも付属しているので手間いらず

最近、OpenTXユーザーとなったわたしにとってはTinyながらTelemetryが使えることにOSDよりも興奮します。正確なRSSIが得られますし、バッテリーの電圧値を送信機に喋らせることが出来ます。Smart AudioもあるのでVTXの設定もLua Scriptで済ませられると考えるだけでわくわくします。
FCとCamera+VTXをコネクターで接続すると、あとはフレームに載せてモーターを接続するだけで飛びます。リード線を引き回すなんてことが必要ないスマートな構成です。
[ 設定 ]
Betaflight 3.5を導入して、ごくごく普通に設定しました。
– Receiver : 基本設定で、受信機モードを”SPI受信サポート”、SPIバス受信プロトコルを”FRSKY_X”にします
– Smartaudio : ポートにてUART2をTBS SmartAudioに設定します
PIDとRateは例によってPROJECT MOCKINGBIRD v1.1b準拠にしました。フィルターその他は変更していません。
[ バインド ]
電池をつないでからバインドボタンを押せば良いようです。よくあるようにボタンを押しながら電源をつなぐというような苦労は要らないみたいです。
[ 飛びっぷり ]
今どきのBetaflightでコントロールするFCでは飛び方に不安はありません。Mockingbirdの設定を施す前でも、十分に安定していました。8520モーターは力強いです。これでブザーが付いていれば屋外でもばんばん飛ばすかも知れません。
不具合というか、おそらくはハズレFCを引いてしまったのだと思いますが、連続して飛行していると時々FCが暴走します。暴走すると、テレメトリーが失われたと送信機が話し、コントロールを失い、モーターが回りっぱなしになります。このため、ちょっと屋外飛行を躊躇しています。