新しい環境での設定ガイドを書きました。以下の内容も残してはおきますが、あたらしく書いた
BLHeli_Mを使用した無料RPMフィルターの設定
を参考にしていただきたいです。
— 内容が古くなっていますので一番上のリンク先を参照願います —
[[ お試しになる時は十分に注意して自己責任でお願いします。私は、これではなく有料版の方ですが色々と弄っていてESC壊しました(T^T) ]]
2020/11/09 さらなる追記です。JazzMavericは現在はBlheli_Mというのに変わったようです。これだと無料でRPMフィルターかつ48/96KHz PWMで使えそうです。
JazzMavericはversion 16.73を使用すべしとBetaflight公式にかかれているので要注意です。
JazzMaveric 16.73以降のどこが悪いのかは飛ばしてみても私にはよく分かりません。また16.73は48K PWMが使えないのが少し残念です。48Kを使うためにJESCをRPMフィルター無しを使う機体や有料のJESCを使用した機体も使用していました。加えて新たに有料版のJESCの20個パックを購入しました。なんとなく有料版がメインになりそうな感じです。一機はJazzMavericも残しておこうと思っています。
Betaflight 4.1から使用できるようになったRPMフィルターは効率良くモーターからのノイズをジャイロデータから除去する有効な手段です。ところがBLHeli_32なら標準機能としてサポートされていますが、古いESCであるBLHeli_Sは標準でのサポートが無く有料ソフトJESCを購入する必要がありました。
それに加えて無料版が登場しました。これでTinyWhoop含めて我が家の全てのブラシレス機に気軽にRPMフィルターが適用出来ます。
以下のYouTubeビデオに詳細な解説がなされています。
ごく簡単に私の設定例も書いておきます。MacBookでの例です。
ファームウェアの導入はハードウェアに合うHEXファイルをダウンロードしてBLHeli Configuratorでフラッシュするだけなので難しくはありません。
[ ESCハードウェアの確認 ]
— 内容が古くなっていますので一番上のリンク先を参照願います —
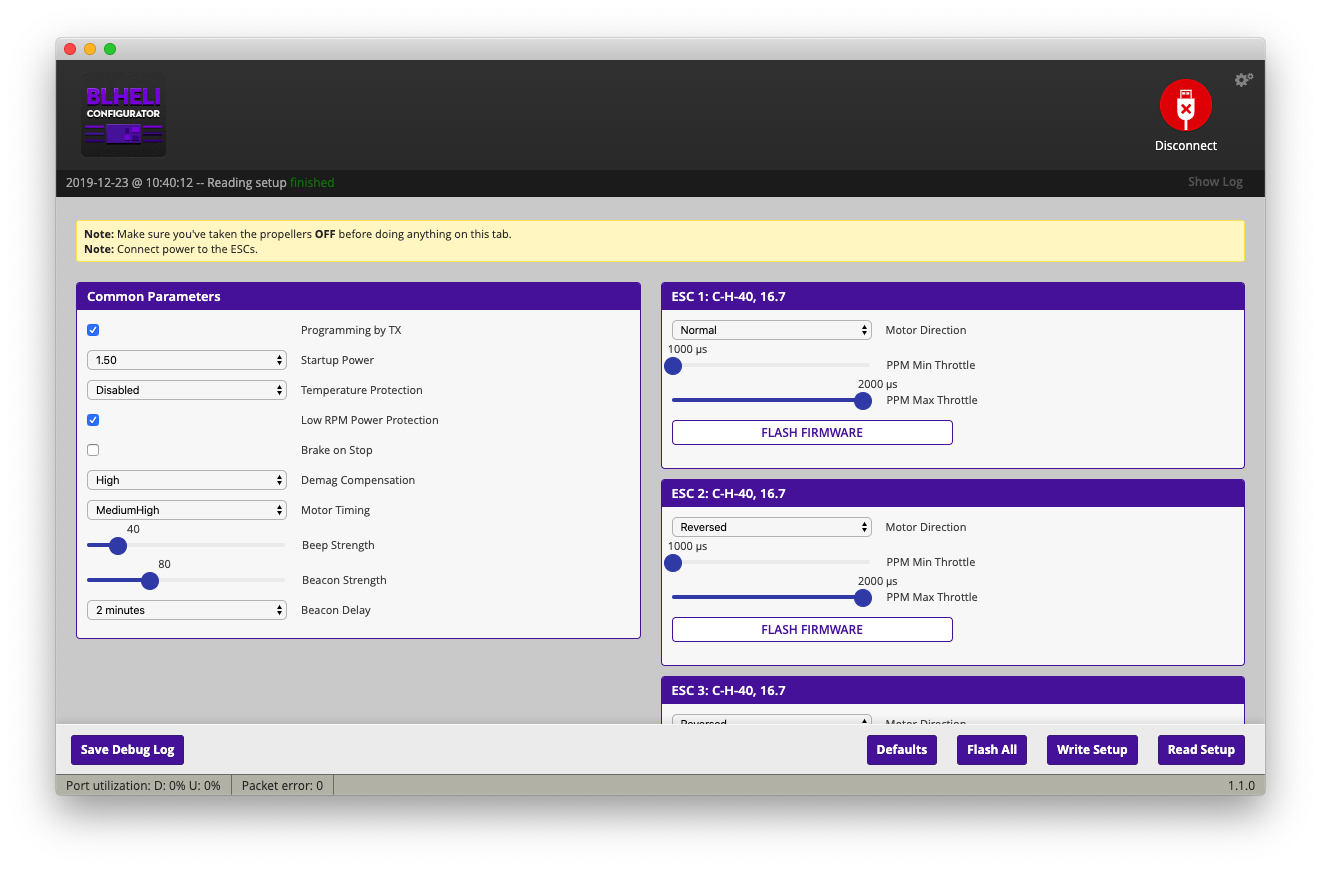
リポをつないだ機体をUSB接続しBLHeli Configuratorを立ち上げRead Setupを行うと上の画面が出ます。各ESCのタイトルラインにハードウェアの種類と現在のファームウェアバージョンが表示されています。この例ですとC-H-40, 16.7です。このC-H-40用のファームウェアをダウンロードします。
[ ファームウェアの入手 ]
— 内容が古くなっていますので一番上のリンク先を参照願います —
https://github.com/JazzMaverick/BLHeli/tree/JazzMaverick-patch-1/BLHeli_S%20SiLabs
– 上のページにはバージョン毎のフォルダーが表示されています。私が試した時は”Hex files 16.74″が最新でした。
=> 追記) いま確認したら”16.76 48k”というのが出来ています。PWMが48KHzで稼働するもののようです。48KHzのメリットはきめ細かなコントロールですが、それに加えて小型機の飛行時間が伸びるという話しもあります。
=> さらに追記) 16.73を使うべしとの公式情報に従うと48kは諦めないといけないようです。
– そのフォルダーに入ると拡張子HEXのファイルが多数並んでいます。この中からC-H-40に対応するものを探します。
– C_H_40_REV16_74.HEX(推奨は16_73です)というファイルをクリックするとファイルの中身が表示されます。
– 右上のRawボタンを右クリックして”リンク先を別名で保存”を実行します(Chromeでの例)。
[ ファームウェアのフラッシュ ]
— 内容が古くなっていますので一番上のリンク先を参照願います —
再びBLHeli Configuratorに戻ります。
– もしESCの状態が表示されていなければRead Setupを押します。
– “FLASH FIRMWARE”を押す。
– “Select File Manually”を押し、上でダウンロードしたファイルを選択。
– これを各ESCに対して実行する。
以上でRPMフィルターを設定する準備が出来ました。RPMフィルターの設定例もYouTubeで沢山見つかると思いますので、自分に合うものを探します。私の設定例も以下に書いて起きます。最低限必要なことだけです。
[ BetaflightのRPMフィルター設定 ]
— 内容が古くなっていますので一番上のリンク先を参照願います —
Betaflight 4.1以上が導入されていることが前提です。
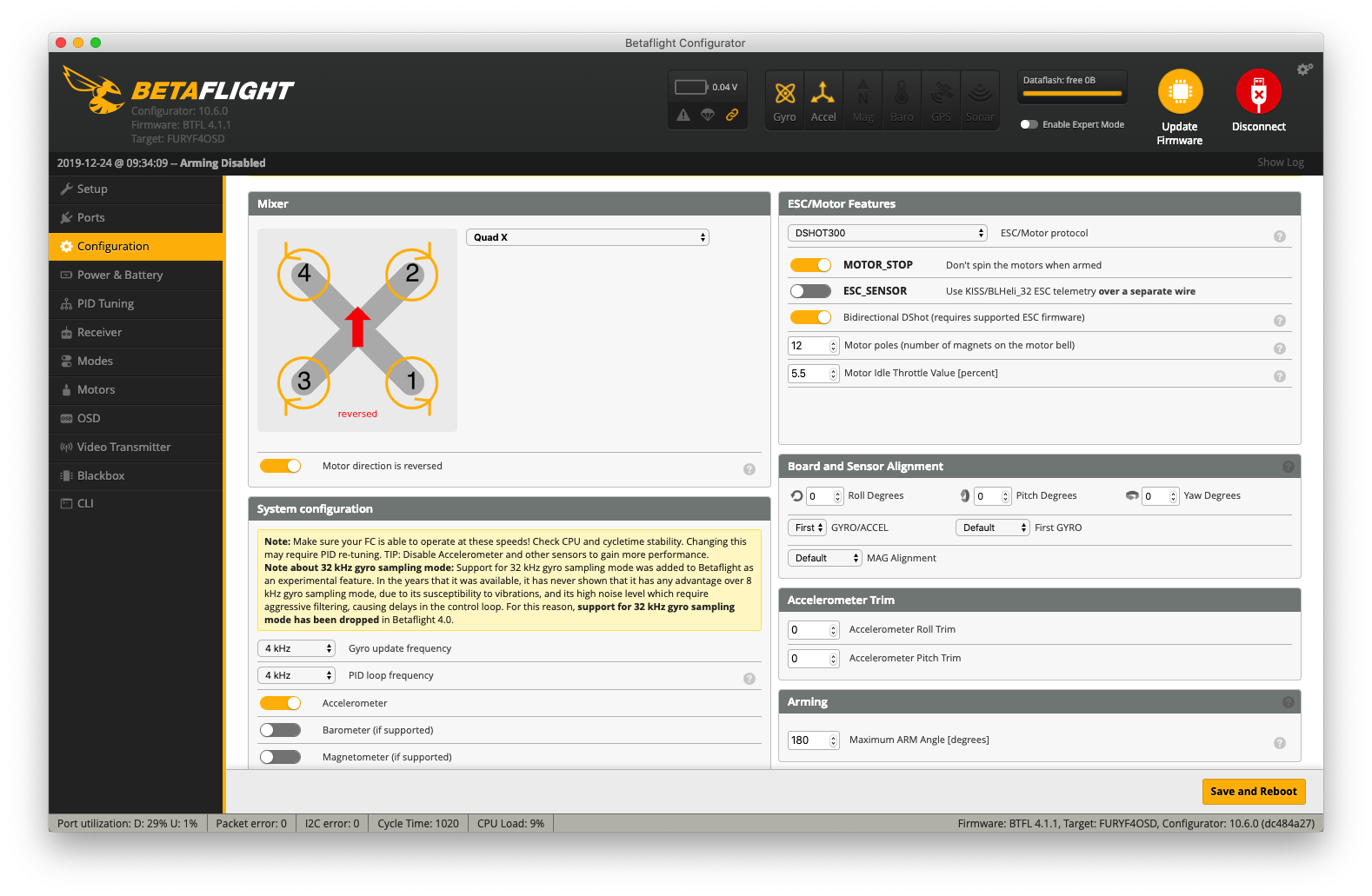
RPMフィルターを有効にするための必須項目です。
– Gyro/PID Loopを共に4 KHzにする。 (最近のファームだと8K/4K)
– ESC/Motor protocolをDSHOT300にする。
– Bidirectional DShotをオンにする。
– Motor polesを実際のモーターに合わせる。モーターベルに磁石がいくつ付いているかを実際に数えて、その数値を設定します。
– CLIにて”set scheduler_optimize_rate = ON”と”save”を実行する。
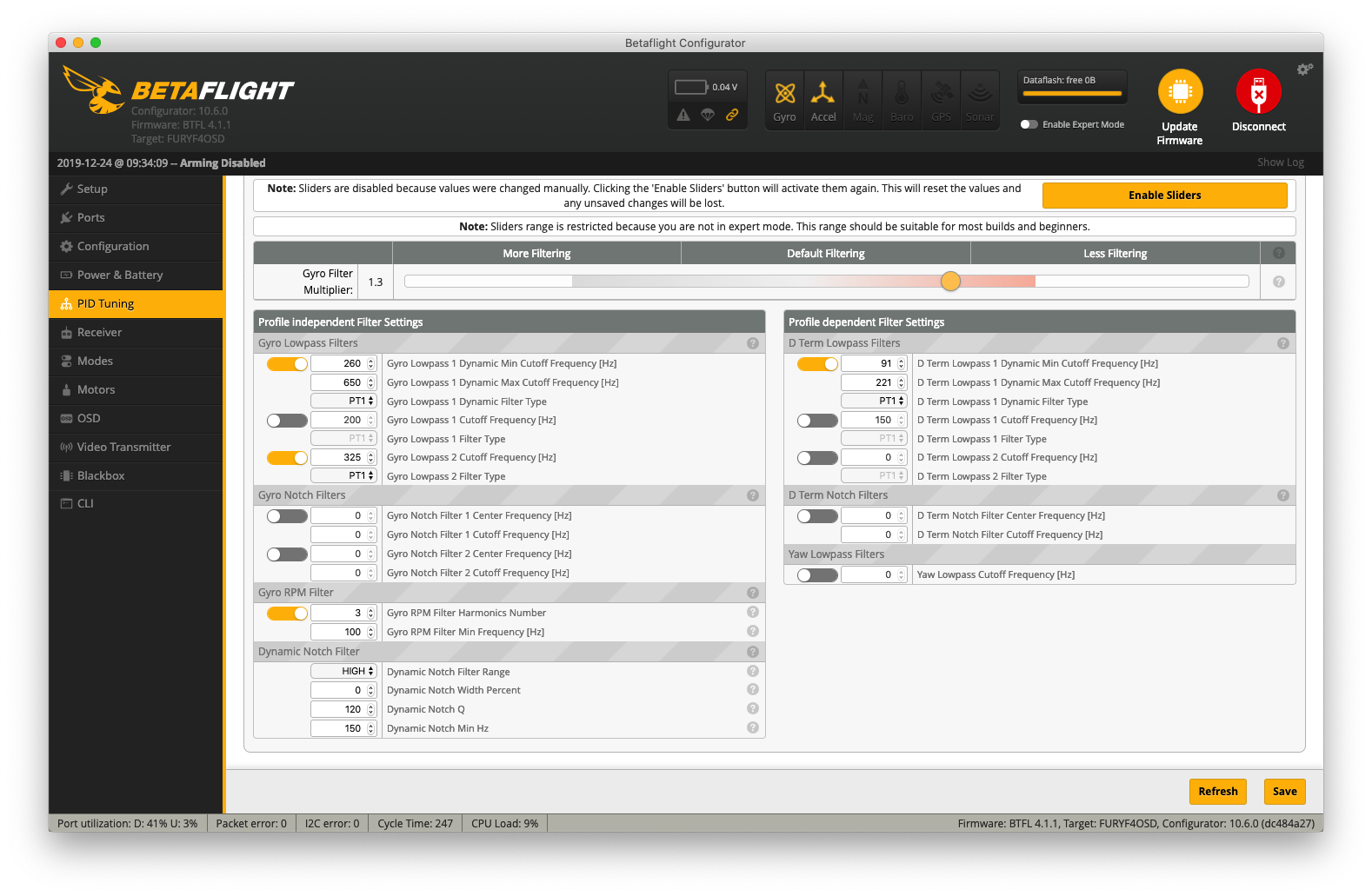
– Gyro RPM Filterがオンになっていることを確認。
– Dynamic Notch Filter/Dynamic Notch Width Percentを0にする。
[ 確認 ]
— 内容が古くなっていますので一番上のリンク先を参照願います —
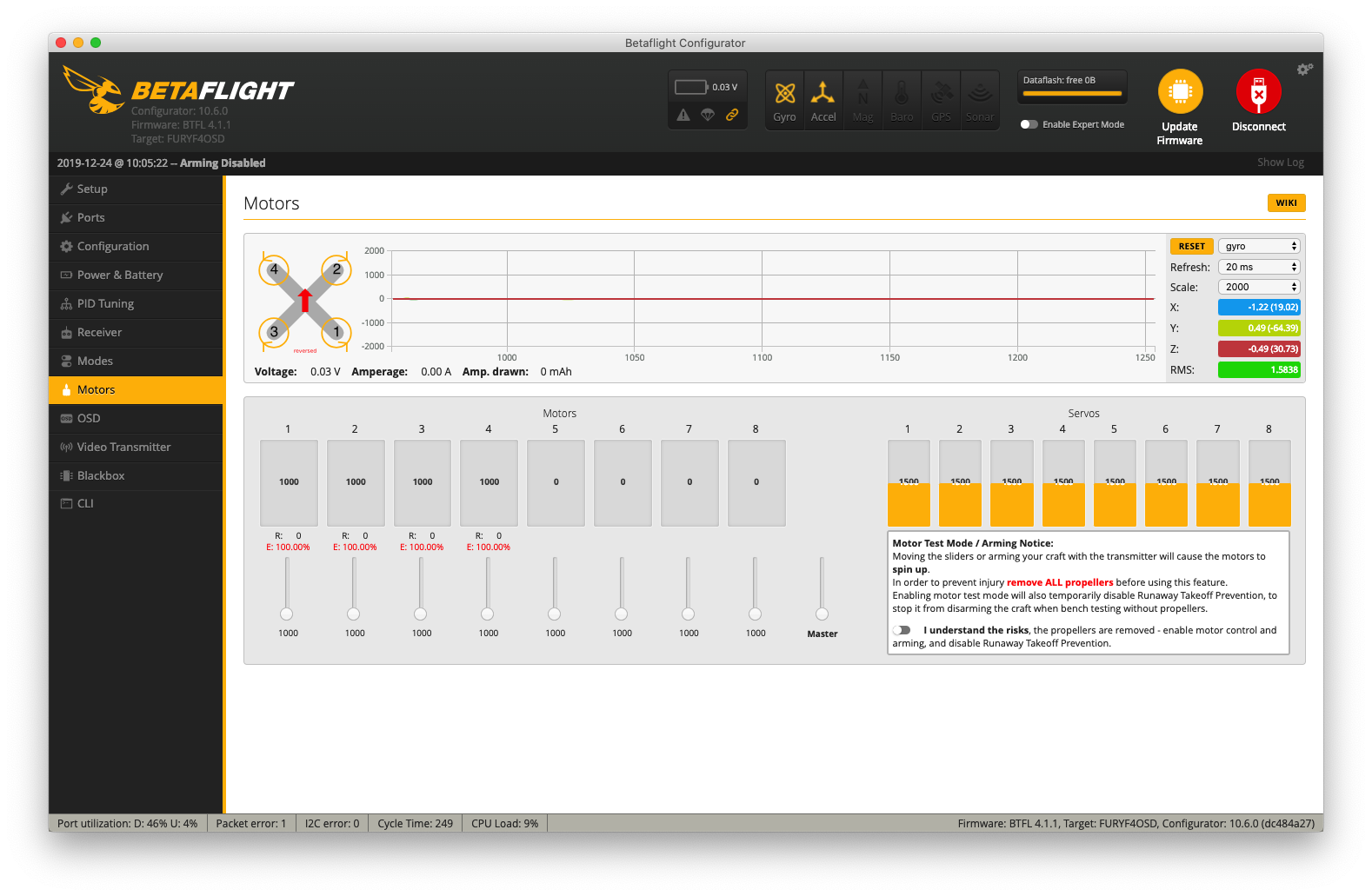
Betaflight ConfiguratorのMotorsタブを表示します。リポを接続していない場合はESCは稼働していませんので上のように各モーターの下に赤字で”E 100%”と表示されるのが正常です。
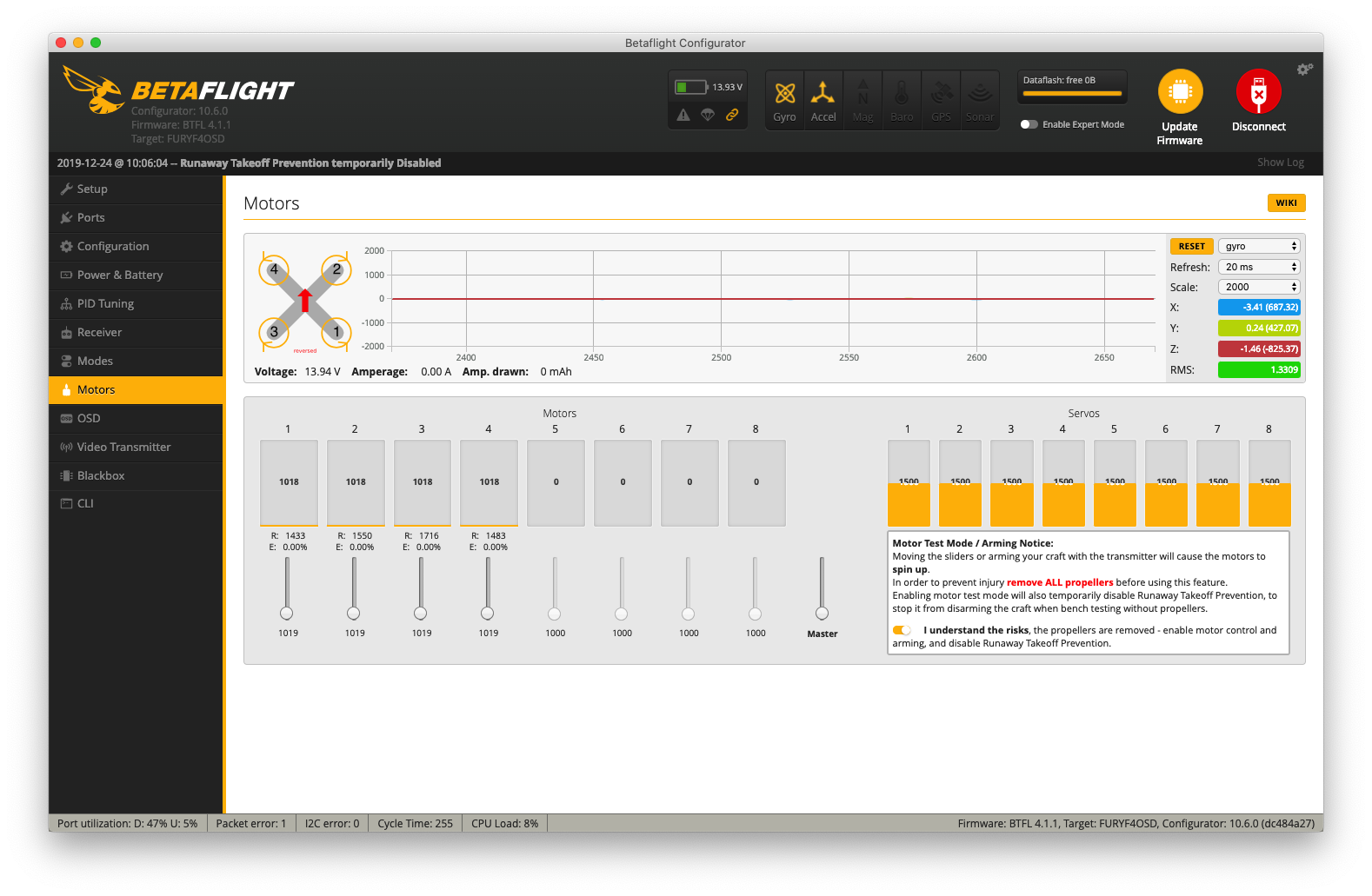
リポを接続しモーターを回転させてみます。R:のところに回転数が表示され、E:のエラーが0.00%ならば完成です。
おまけ。RPMフィルター適用後のテスト飛行。プロペラとかボロボロなので、ちゃんと飛ぶかどうかの確認くらいにしかなっていません。
この投稿をInstagramで見る
2 comments untill now