7月
26
クワッドコプターHUBSAN X4 H107Cの搭載カメラは前方に固定されています。大型機で撮影した画像には真下を向いたものが良くあるので、下向きのカメラを付けてみようと思い、またしても工作に励んでみることに、、、
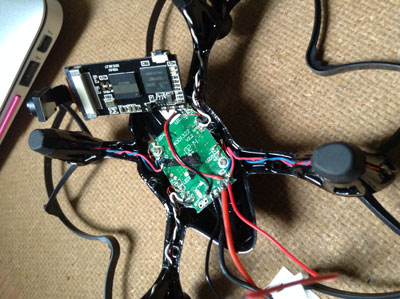 |
本体を開けて電源リード線を追加した。 |
 |
追加するカメラモジュールに電源リード線を接続。バラバラしないようリード線を本体の足に固定した。 |
 |
カメラモジュールを保護するために透明なビニールでラップして両面テープで本体に貼り付けた。カメラ自体はフレキケーブルの先にありあえて固定していない。この状態で飛ばしてみたところ、カメラがかなり細かく本体の振動を拾ってしまい飛んでいる間の画像はずっとブレまくりだった。 |
 |
カメラモジュールを少しずらしてカメラ自体を本体に両面テープで固定したところ、何とか見られる画像が撮れるようになった。 |
下のように映像は何とか撮れました。しかしながら思ったほど良い映像は撮れませんでした。下向きの画像はよほど高度が稼げるか、何かしら絵として面白いものを映し込む努力をしないと迫力ある映像にはならないようです。
また本体の重量が重くなるので、何とか飛ばせるもののもっさりとした飛行になってしまいます。
挙句の果てはハードランディングの際に下向きカメラのレンズに傷が入ってしまいました。実験としては面白かったです。これにて追加のカメラモジュールは外すこととします。
9 comments untill now