PIDチューニングについては、いつかは自分でちゃんと調整してみたいと思っていましたが、色々と面倒くさい感じがして手つかずでした。Betaflight4.1になり、スライダーによるチューニングが出来るようになりました。これならば出来そうな気がします。
対象とする期待は軽量DJI FPV機で、スペックは以下の通りです。
DJI Digital FPV System GEPRC Cygnet 3 frame mod 3D print data for DJI Air unit mount iFlight Succe-X E Mini F4 35A Flight Stack TBS Crossfire Nano RX XING 1404 4600KV EMAX Avan Mini 3x2.4x3 Weight: 246g (including battery)

Betaflight 4.1を導入し、フィルター/PIDとも既定値で安定して飛行出来ました。ただし、急激なターンやダイブからの引き起こしでプロップウォッシュのためブルブルと震えます。コントロールを失うほどではありませんが、動画を見ていて気になるくらいの酷さではあります。今までだと、スロットルを気をつけて早めに入れるとかで対処しているところですが、この現象の改善を試みることにしました。
間違いなく効果はありましたが、軽くYouTubeなどで情報を収集して実施しただけなので正しい方法とは限りません。何かしら参考になれば幸いです。
[ 現状把握 ]
飛ばしてみたフィーリングはかなり良いのですが、ブラックボックスでも確認してみます。
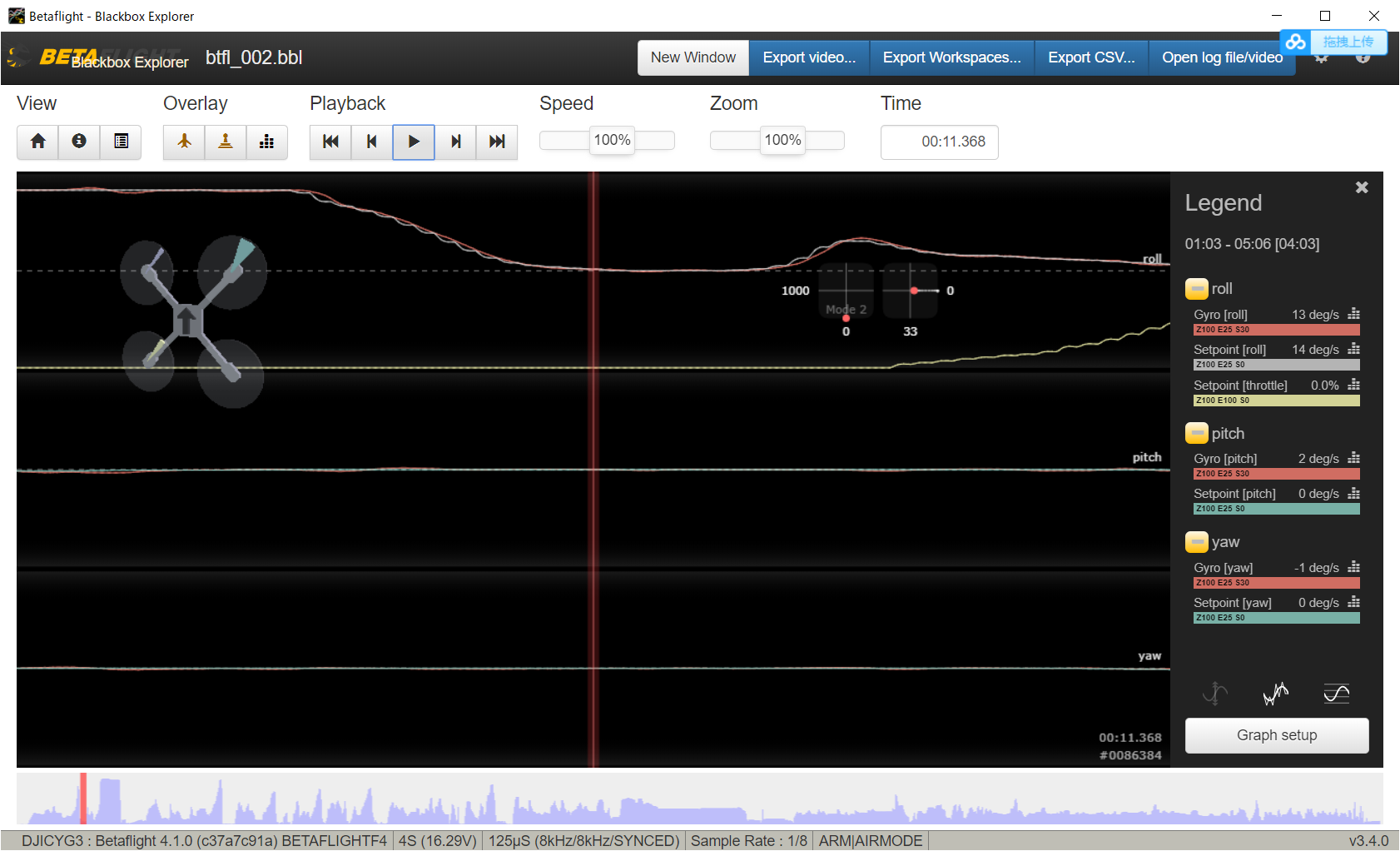
ログの検証経験が少ないので確実なことは言えませんが、急激なスティック操作においてもsetpointに対して十分にgyroは追従しているように見えます。
[ RPMフィルター ]
どうせならばと話題のRPMフィルターも導入しました。使用しているESCはBLHeli_Sなので有料ソフトのJESCを導入しています。
-> BLHeli_S用の無料ファームも出ました。
YouTubeなどでRPMフィルターのセットアップはたくさん見つかります。追加のフィルター設定も色々とガイドされていますが、わたしはDynamic Notch Filterだけを既定値から変更しました。既定値では、それぞれMEDIUM/8/120/150のところをMEDIUM/0/200/90にしています。どこかの情報を参考にしただけで根拠は薄いですが、少なくともRPMフィルターを使う場合はdyn_notch_width_percentは0(ダイナミックノッチフィルターを2つから1つにする)で良いようです。
[ フィルターの設定 ]
目的はフィルター設定を軽くしてプロセッサーの負荷を軽減しレスポンスを良くすることです。それによりプロップウォッシュにより良く対処することもできます。フィルターのスライダーを動かしては実際に飛行し異常を感じないかモーターが加熱しないかを確認しながらフィルターを軽くしていきます。
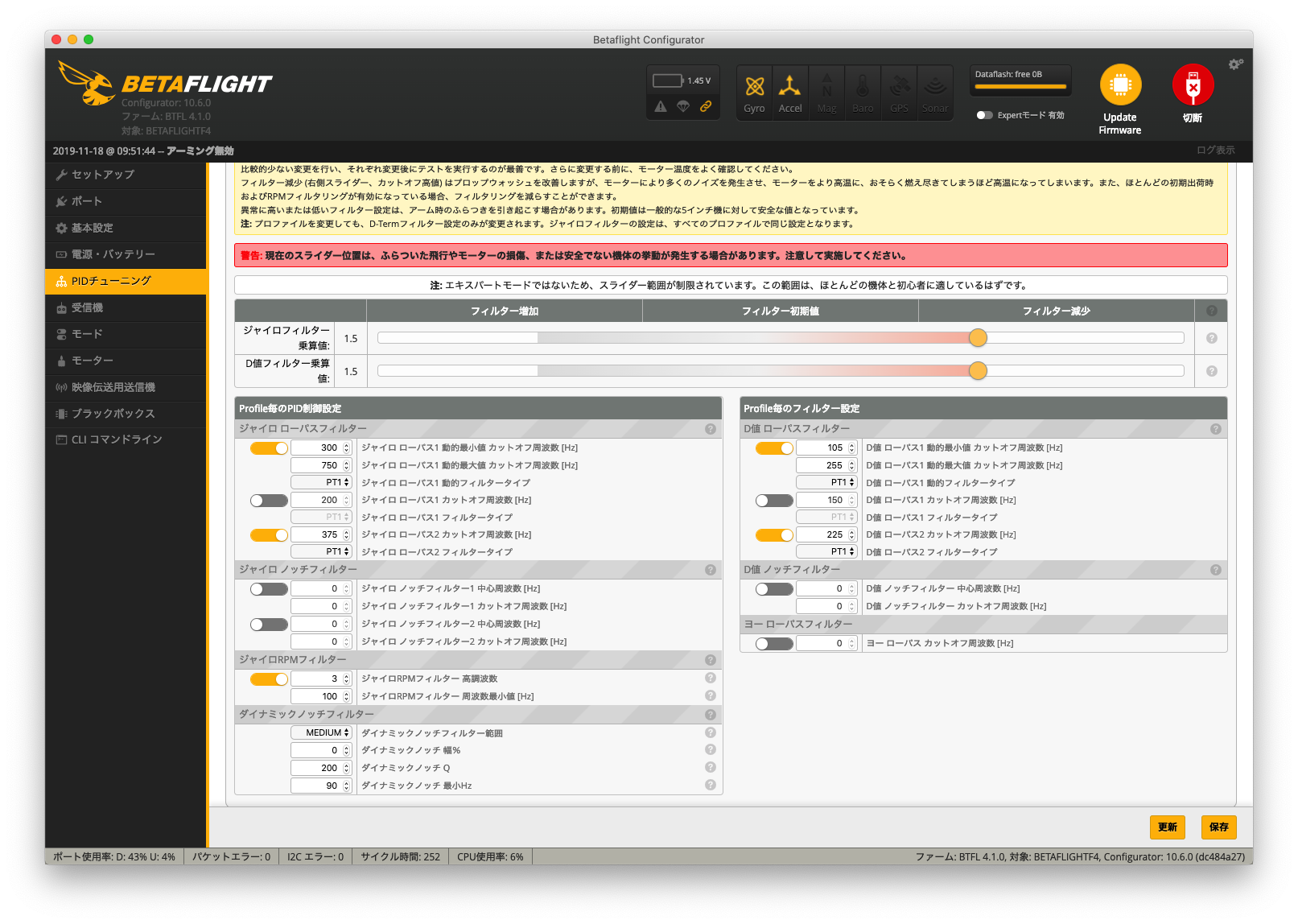
ジャイロフィルターとD値フィルターを同時に動かして試してみました。Expertモードを使わない最低値である1.5まで下げても問題はありませんでした。もっと下げられるかも知れませんが、このくらいにしておきます。
プロップウォッシュについては、これだけでは改善されませんでした。
[ PIDの設定 ]
今回はプロップウォッシュへの対処ですのでPDバランスとPDゲインの2つのスライダーだけに注目します。それぞれ別々に強くしたり一緒に強くしたりしながら飛ばしてみました。
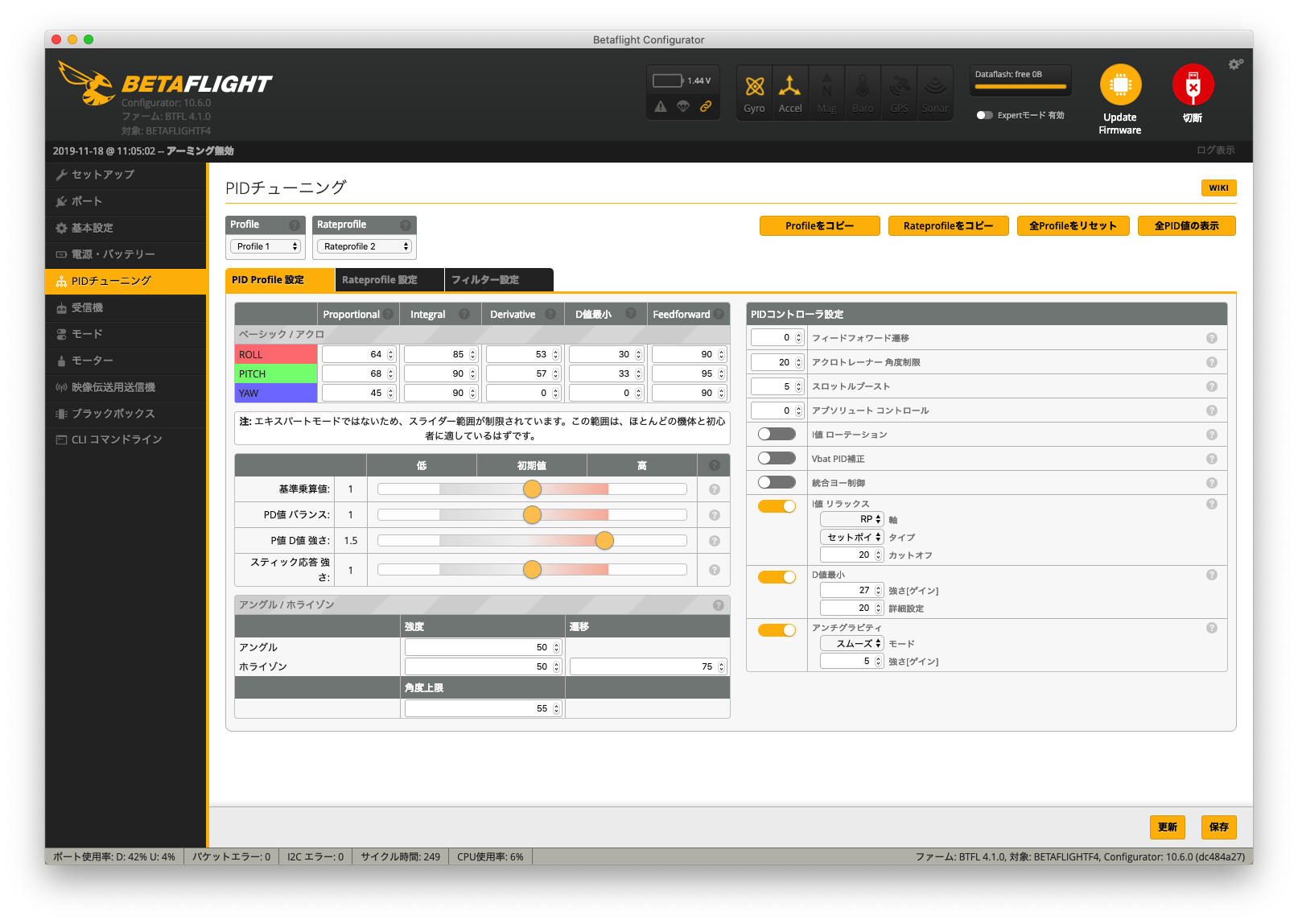
この試行錯誤はなかなか難しく時間がかかります。最終的にはP and D Gainのスライダーのみを1.5に強めることにしました。
まだわずかにプロップウォッシュを感じますが、時間的にはるかに短くなりました。チューニング前はブルブルブルと揺れていたのがブルッと感じるくらいになりました。その後もかなり飛ばしていますが、この結果に満足しています。
no comment untill now