訂正) 最初、電子回路的な説明に大幅な間違いがあったので訂正しておきます。最初のを読んで疑問を持たれた方、忘れてください。m(_ _)m
BetaFPV GoPro Liteを95Xフレームに載せての飛行は快適でかつ安定しているのでかなり気に入っています。BECボードのおかげで簡単に配線できるリモートでの録画開始停止も使ってみるとやめられない便利さなのですが、何時ものようにFacebookのNaked Goproグループを眺めていたら気になる書き込み(リンク先は、このグループに加入しないと見えません)がありました。
もとの話題はBECボードを使うとGoProのメインボード壊すんじゃない?という問いかけでした。これに対してレスの中で2つの事が語られています。おそらく最初に始まった討論は質問に対する本命の答えではありませんでしたが、大変気になることなのでtwitterで呟いてみると日本の剥きプロな人たちからの反響もあり色々と調べたり考えたりしました。まずはそれについて調べたことを書きます。その後、本命の問題は詳細はわかりませんが少しだけ書いておきます。
[ GoProのRECボタンのコントロールにbuzz-以外を使って良いのか? ]
もともと剥きプロTipsのひとつにRECボタンをRCからコントロールする手法があります。そこにはRECボタンをFCのbuzz-に接続すべしと書かれていました。何故、buzz-かというと他のUARTやLED_StripはプロセッサーのI/Oそのものですがブザーは大きな電流をオフ、オンするためにトランジスタのスイッチが組み込まれています。これが電気的にはGoProのRECボタンを押すことと等価であるためです。これはとても理にかなった方法です。
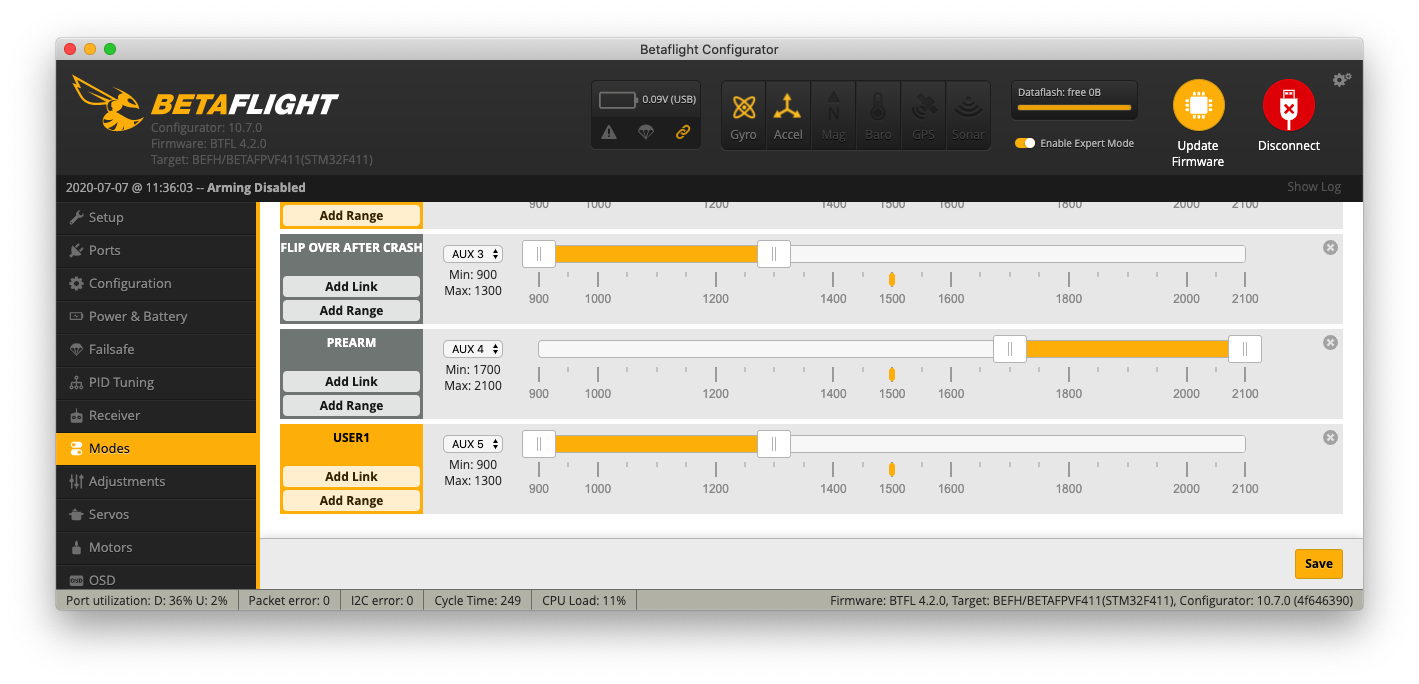
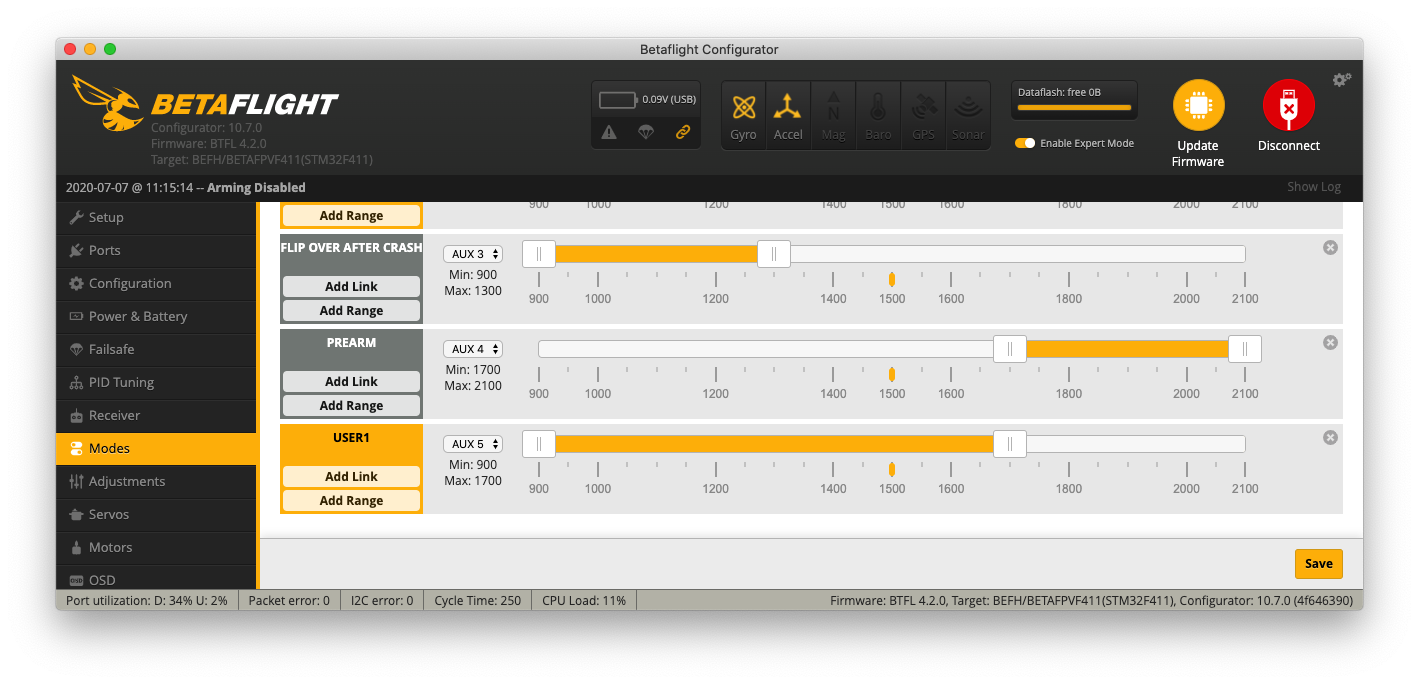
ところがBetaFPV BECボードの説明によるとLED_Stripに繋げば良いよと書かれています。わたしも素直にそれを信用してLED_Stripで録画開始、停止をコントロールするようにして2日ほど飛ばしていました。ところが、先のFaebookの書き込みによるとLED_Stripを使うとGoProを壊すかも知れないのでbuzz-を使うべしとのことでした。ちょっと心配になり調査を開始。
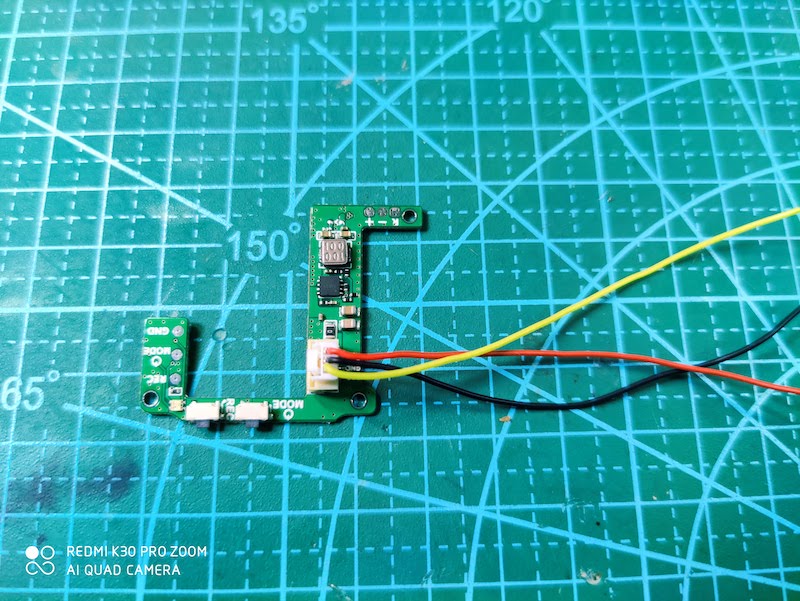
BECボードの商品写真と手元にあるBECボードが違っている!
LED_Stripを使うなんてとんでもないと言っていた人は現物は持っていなくて商品写真から配線を解析していました。それによると単純にGoProのRECボタンがBECボード上のRECボタンを及びFCに接続するための配線に直結されています。確かにそれは良くないです。というのはGoPro側はRECボタンに1.8VほどのVCC電圧でプルアップしていてそれがボタンを押すことによってGNDに落ちて0Vになることを検知しています。ところがLED_Strip側もオンの状態ではプルアップ電圧3.3Vが出ていてオフだとGNDに落ちるようになっています。GNDに落ちた状態ではいくらかの電流がGoProからFCに流れ込みます。想定されているより少し多い電流がI/Oピンから内部のトランジスタに流れますが、おそらくは問題ありません。FC側が3.3Vになっている場合、FC側の電圧が高いので何かしらの電流がGoPro側に流れ込みます。結果としてRECボタンを検知しているトランジスターには想定より大きな電圧が直接かかります。またプルアップ抵抗を通して、おそらくはVCC電圧もいくらか引き上げることになります。あと、FCから流れ出す電流の分だけ3.3Vのレギュレーターの負荷が想定より増えます。このように信号線の両側が電圧を出すような接続は真っ当なエンジニアは絶対にやりません。
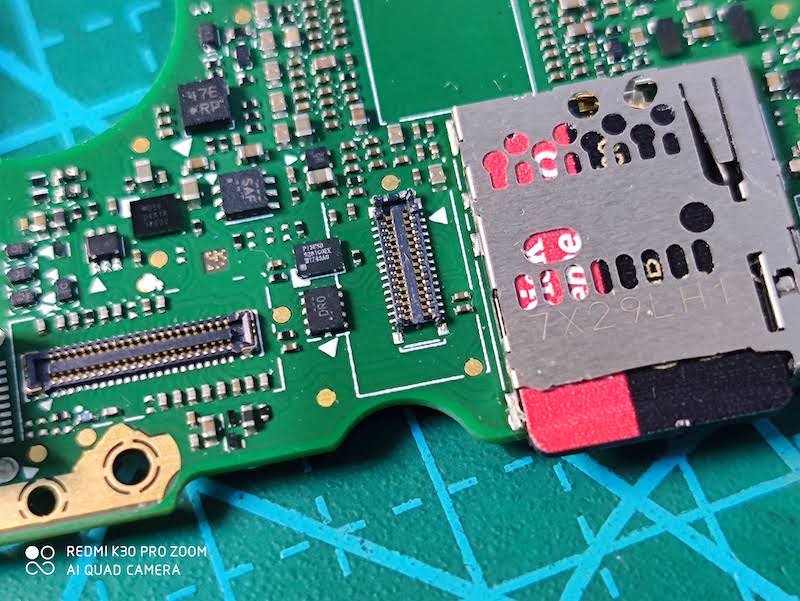
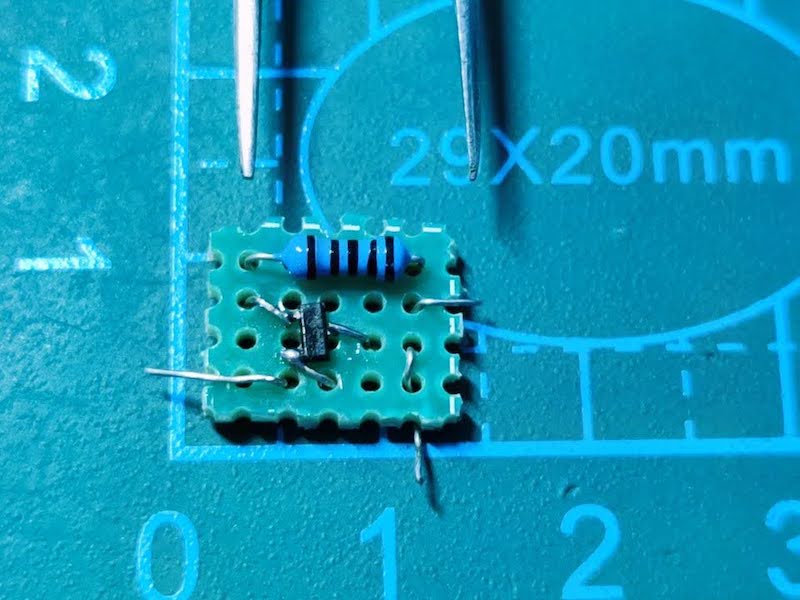
BetaFPVもこのことを知らないはずは無いのでLED_Stripを使っても良いための仕掛けをBECボードに施しているはずだと考えて調べてみると手元にあるボードは商品写真と違っていることが分かりました。

この写真の中央付近にある小さな黒い部品が追加されています。これはおそらくチップ抵抗器で計測したところ約1Kオームのものでした。RECボタンの配線はこの抵抗器を通してFCに接続されるように改良されていました。確かに直結よりはGoProに流れ込む電流を制限することは出来そうです。
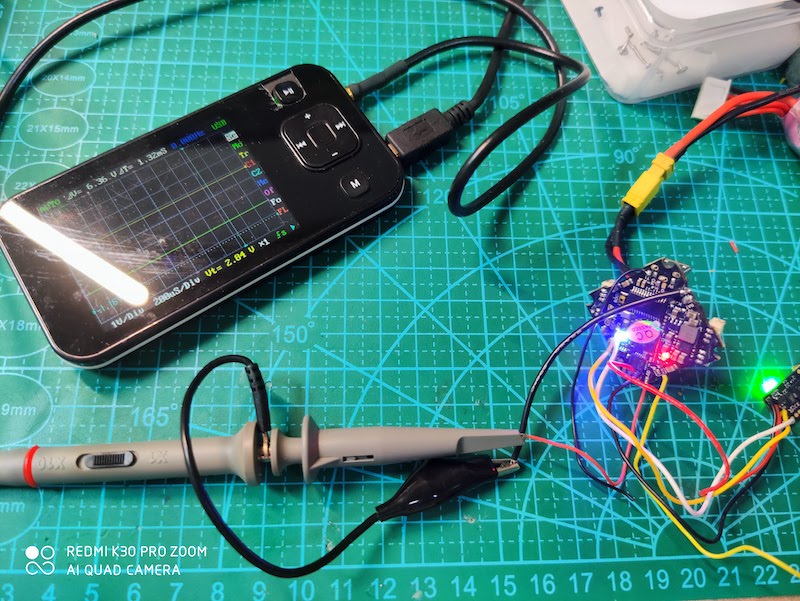
なんにせよ計測が大事ということで格安スコープDSO201で調べてみることにしました。

といいつつ、計測は目的のところまでは達せず。GoPro側が1.8V、FC側はRCの操作で3.3Vと0Vを切り替えられることまでを確認しました。そのあと実構成の電圧を計測するつもりでしたが、次に紹介する問題の関連でGoProを壊す可能性があるので取りやめました。
GoPro側の電圧が1.8V近くに落ち着いていれば影響が少ないと考えることも出来ますが完全に安全性を判断できるかというと何とも言えません。1Kオームの抵抗により電圧の差は小さくなり均衡すればGoProに流れ込む電流が小さくなるのは間違いありません。といっても流れ込む電流が無くなることはありません。またもともと供給出来る電力はかなり小さいものなので、それで直ぐにGoProボードを壊すことは無いのかも知れません。
選択肢は、
1) もしbuzz-が使えるのならそちらを使う。
2) 多少のリスクを承知した上でLED_Stripあるいは他のI/Oピンを使ってみる(わたしはバッテリー6本の実績あり)。
3) RCからのリモートコントロールを諦める。
4) 真面目にトランジスターでスイッチ回路を作って組み込む。
です。私的には、まずは3番にしておいて、4番目に挑戦するという方向で進みたいと思います。
先のスレッドでLED_Stripは使ったらいかんと言っていた人に1Kオームの抵抗が入っているけどどう思うと問いかけてみました。彼の答えは、1Kオームでまずまずの電圧にさげられるのかもしれんが、わたしならやはりbuzz-を使うと言っていました。
[ BECボードの接続が悪いとGoProを壊す!? ]
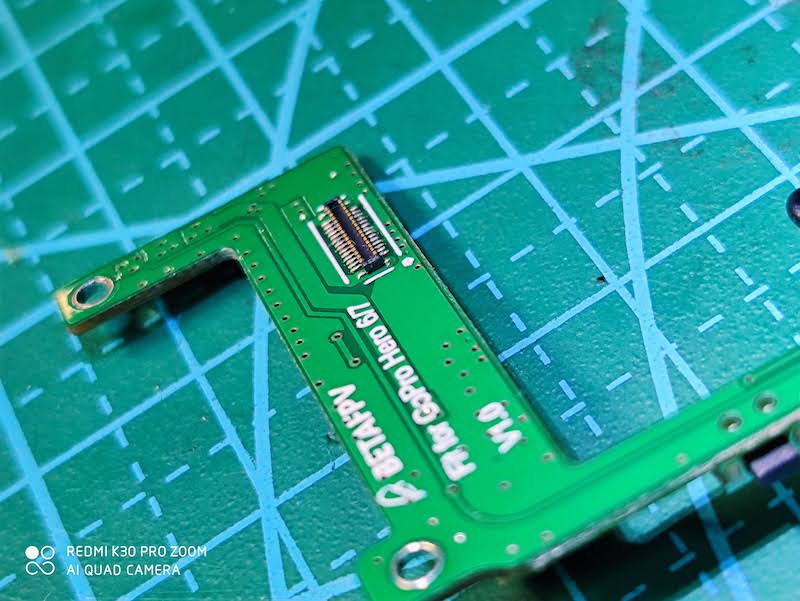
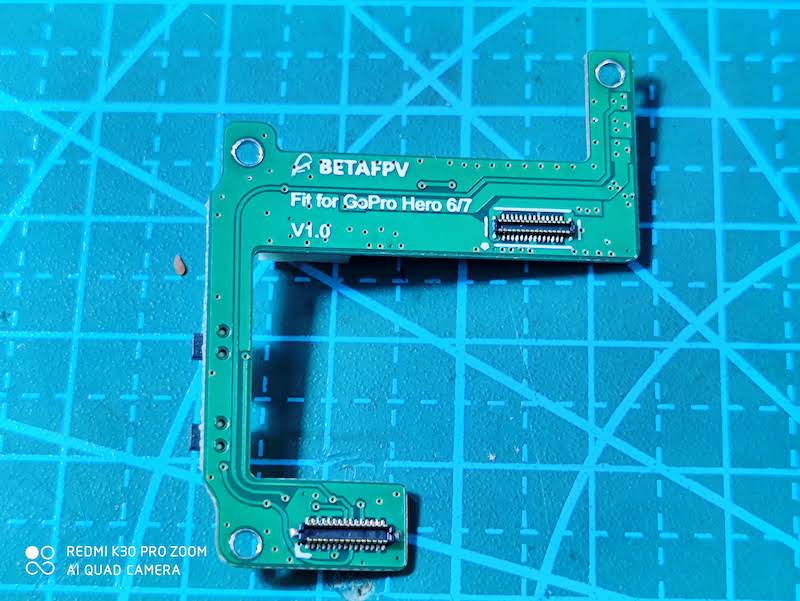
先のFacebookのスレッドにてフランス人の有名なFPV映像クリエイターのFinckが、結局のところLED_Strip使わなければ良いの?と書き込みました。それに対する答えがちょっと驚きです。BECボードがきちんと刺さっていない状態で通電するとGoProのボードが壊れるとのことでした。現在のBECボードにはV1.0と印刷されていますが、対策を施したV2が出来ているようです。
当面は、というか誤動作しないためにもしっかりとBECボードが固定できるようにしないといけません。GoPro Liteケースは大丈夫な気がします。umma85などでBECボード単体で使用する場合は自分で何かしら工夫しないといけません。ちょっとテストするだけだからといってバラ組で電源を上げるのは厳禁ですね。