なかなか練習出来ない5インチ機をうまくなるべくシュミレーターに取り組んでいます。使用しているのはFreeriderとLiftoffでMacBookとWindowsデスクトップの両方で稼働しています。ちゃんとした練習のためには本物の送信機(プロポ)を使用することが必須です。送信機とパソコンの接続は難しくはないのですが、Windows版のFreeriderだけが接続は出来てもうまくコントロール出来ません。それを解決する方法について覚え書き的に書いておきます。
ネットを探すとOpenTX用の設定ガイドはすぐに見つかります。またDeviationの入ったDEVO用の出来合いのモデル・ファイルもあります。私がシュミレーターで主に使うT8SG PLUSではDEVO用のモデルを入れると微妙な状況になりますし、簡単ですので自分で作成するのが無難です。
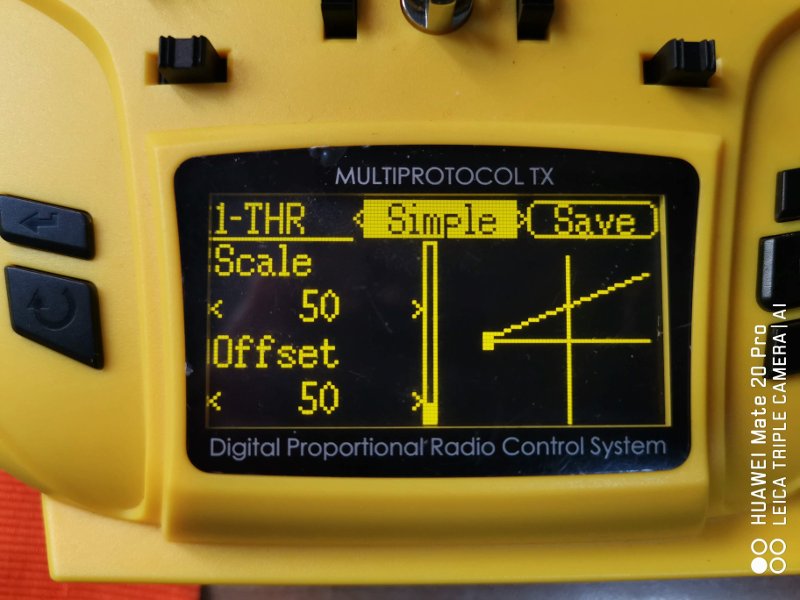
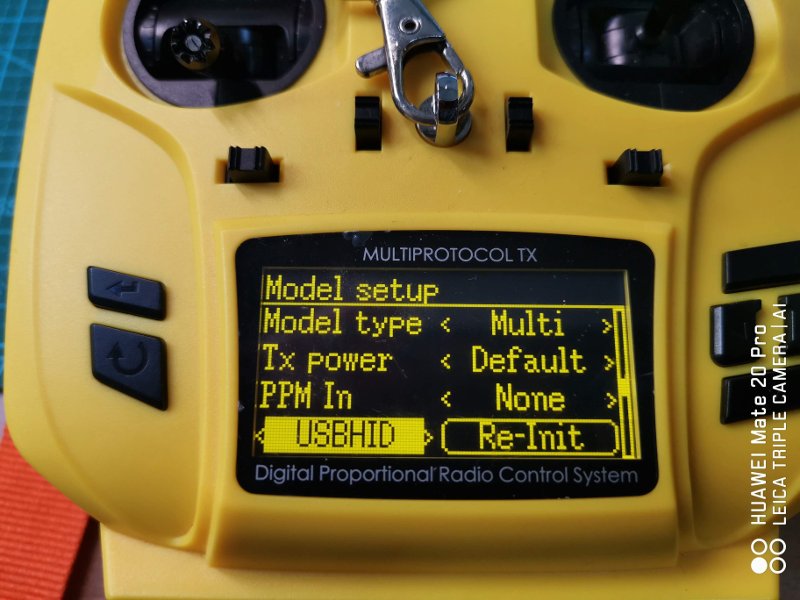
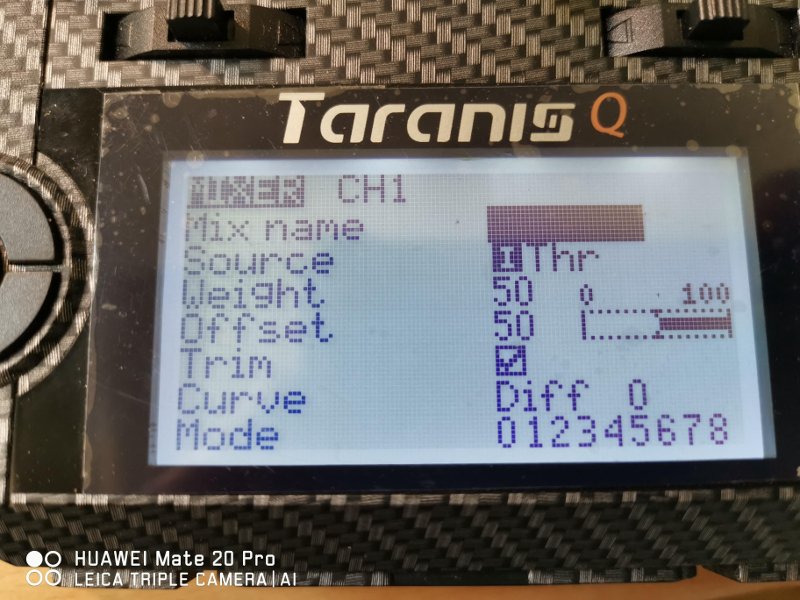
行うべきことは単純です。OpenTXもDeviationも規定値ではスティックの振れ幅は-100から100になっています。これを全てのスティックについて0から100に変更するだけです。
[ Deviation – T8SG PLUS ]
USB接続の場合は、Model SetupのプロトコルをUSBHIDにしておきます。
と書きましたが私のT8SG Plusではファームウェアの更新を行わないとUSB接続(HID)によるシュミレーターの操作は出来ませんでした。これについては改めて手順を書きます。
[ OpenTX – QX7S ]
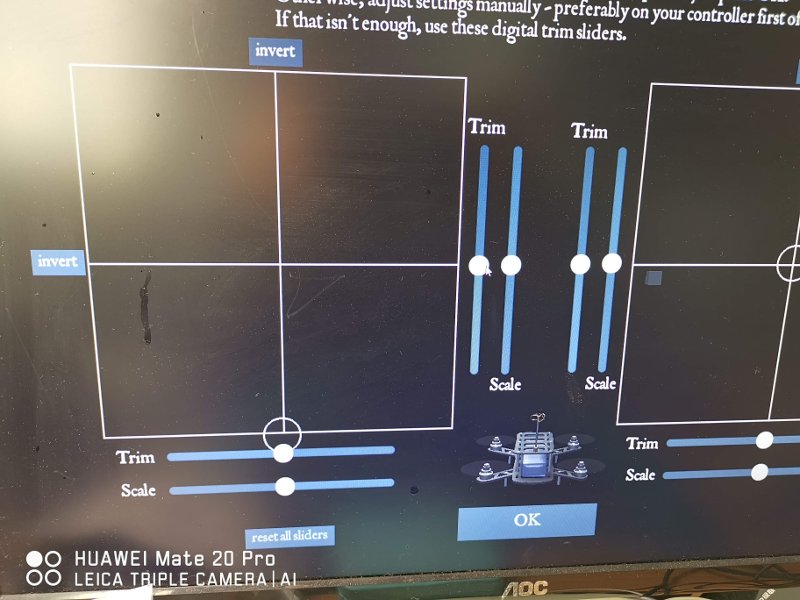
[ Windows版Freerider ]
[ 互換性 ]
[ 関連記事 ] FPVシュミレーターのススメ (2018/07/22)Deviationのファームアップデート (2019/01/29)FPVシュミレーターのススメ設定編 -3- 送信機の無線接続 (2019/01/31)
VIDEO
私が使用している1080P 60FPSで録画出来るRuncam split mini2のBeta75X用のカメラマウントは上海でのFPVフライトの師匠である水田さんの設計によるものですが、その3Dプリンター出力用ファイルを水田さんのご厚意により公開することになりました。リンクは下に貼ってあります。
My Beta75X has HD camera recorder Runcam split mini2 with 3D printed mount. This mount was designed by my FPV flight guru Mr. Mizuta. He kindly allows me to attach STL file here. Please refer link below.
Runcam Beta75x_mount_v6.4-Small.stlの商用利用はご遠慮ください。
Please do not use “Runcam Beta75x_mount_v6.4-Small.stl” for commercial purpose.
Runcam Beta75x_mount_v6.4-Small.stl
Use metal studs come with Runcam split mini2.
Wiring sample for original Beta75X VTX.
Fatshark Dominator V3の受信機を感度の良さそうなFurious True-D V3に交換しました。その後、時々Fatsharkの画面が消えたりDVRが動かない現象が発生。最初はてっきりFatsharkの故障かと思いましたが、考えてみるとTrue-Dを入れてから問題が発生していました。そこで情報を探してみると海外の掲示板で同じ現象と対策が見つかりました。以下のリンクがその情報です。このスレッド自体は他のTrue-D自体の問題について多くの書き込みがあります。私のTrue-Dは、その問題については既に対策が施されていました。
https://www.rcgroups.com/forums/showthread.php?2839452-Furious-True-D-V3-Diversity-Receiver-System-Kills-Fat-Shark-HD-Dominators/page5
https://www.rcgroups.com/forums/showpost.php?p=37251788&postcount=221
問題はTrue-Dが電力を食い過ぎているということで、対策は独立した5Vのレギュレーターを組み込んでTrue-Dに直接給電するというものです。
用意したのはD-SUMと書かれた5V 3Aを供給出来るDC-DCコンバーターです。入力は7V-28Vです。念のため出力波形を簡単なスコープ で見てみました。ノイズもなく綺麗な波形なのでコンデンサーとか付けなくても大丈夫そうです。
Fastsharkを分解してバッテリーのコネクターから入力電圧を取ります。ファンMod を行っているので電源コネクターからは二組のリード線が出ている。
筐体の上の方に隙間があるので、そこにレギュレーターをおさめます。
+5Vの出力をFastsharkの中を通して受信機ベイまで引っ張ります。GNDは入力側で接続されているので引っ張らなくても大丈夫です。
True-Dの一番下のピンを曲げて、そこに+5Vの線を接続します。コネクターを分解して得たピンで接続しています。
ピンを曲げているので、他のピンがちゃんと入るかどうか心配でしたが問題なく収まったようです。
綺麗に元に戻せば完成です。しばらく室内飛行でテストしましたが問題なく動きます。屋外飛行に持ち出しても大丈夫そうです。
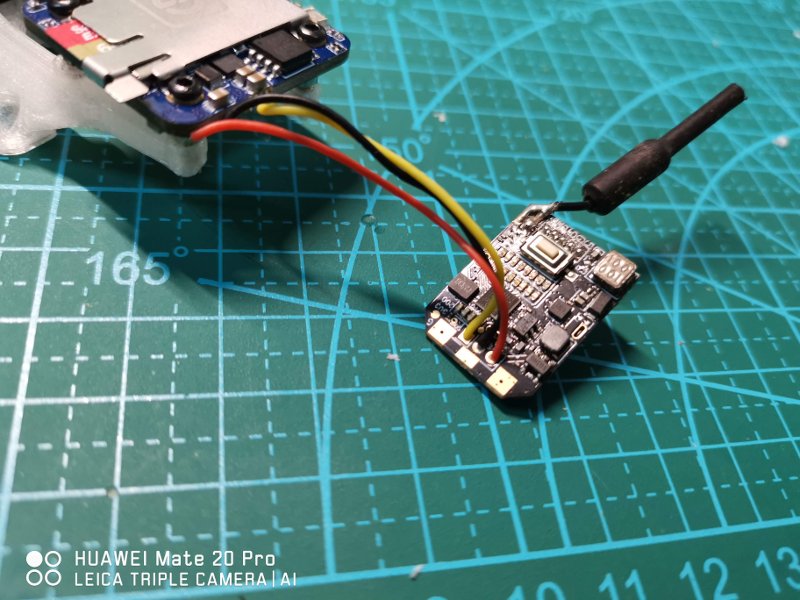
BetaFPV Beta65XのカメラをCaddx Turbo EOS1(1200VTL)に換装しました。
EOS1とEOS2の違いが今ひとつ分かりません。マウントのためのネジ穴があるのがEOS2だという説がありますが、わたしのはEOS1と書かれていますがネジ穴がありました。
カメラマウントは以下のサイトからもらったデータを使用して3Dプリンターで出力しました。
https://www.thingiverse.com/thing:3113231
キャノピーは元々付いていたもののカメラ穴を広げ、またカメラマウントの足部分も当たるので少し切り取りなんとか付けました。
オリジナルのカメラでも十分に飛ばせますが、より解像度が上がり、暗い部分も良く見えているので、いざという時に役に立つはずです。
VIDEO
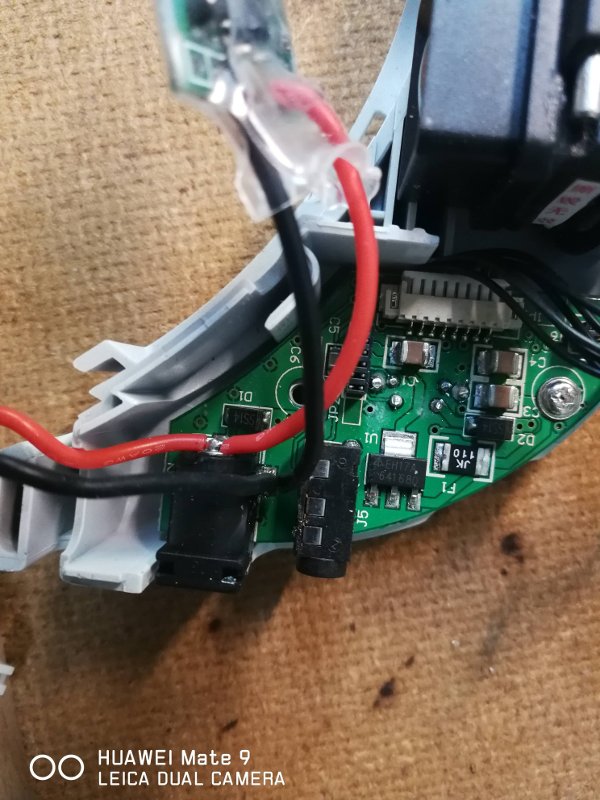
やや燃費が悪い(75Xと同じ容量の電池を使っても飛行時間がだいぶ短い)ながら家の中でも外でも軽快に飛ばせるBeta65Xですが、最近不調になり飛ばし始めてすぐにバッテリー電圧低下の警告が出るようになりました。原因の目星はだいたい付いていてESCポードとFCボードの間でうまく電圧が伝わっていないと想像出来ました。
対策として半田付けでジャンパーケーブルを組み込むことにしました。
ついでなのでXT30コネクターへの変更も行いました。
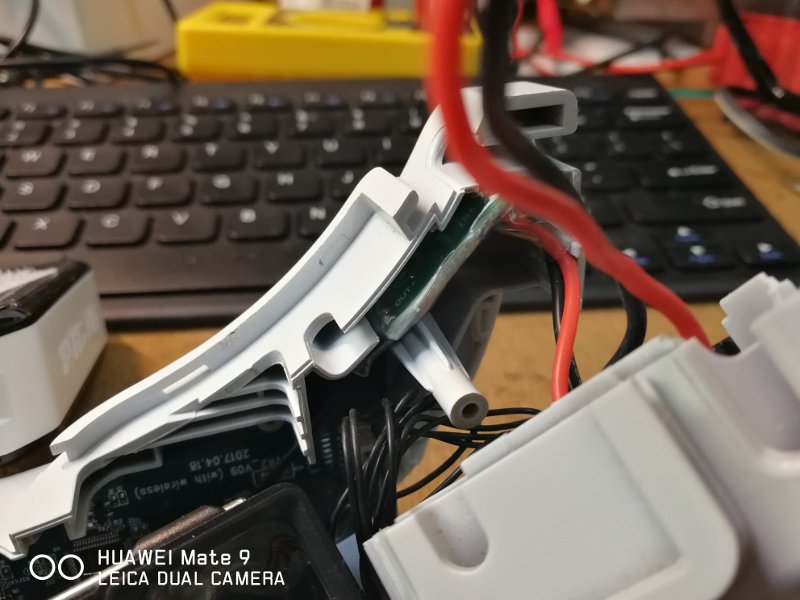
一体化した2Sバッテリーを使用するためにフレームに3Dプリントしたバッテリーホルダー の取り付けを行います。
バッテリーホルダーを設計した人は、バッテリーホルダーに切り込みを入れてフレームにはめ込むように考えていますが、3Dプリントで使用した材料がPLAという固いものなので、この方法は使用せず。フレーム側を大胆に切り取りはめ込んで接着しました。
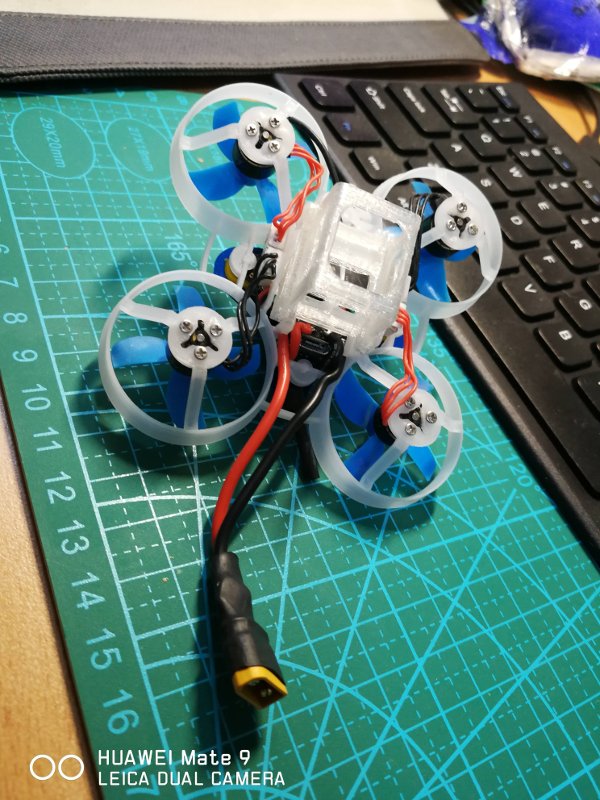
なんだかXT30コネクターが筐体の大きさに対して不釣り合いな気もします。またもとのPH2.0コネクターに戻すかも知れません。
Beta75XもBeta65Xも快適に飛行出来て気に入っていますが、いろいろと問題もありました。
[ Prop Washout ] Beta75X Washout Tuning を施すことでだいぶ良くなります。根本的にはプロペラを囲んでいるダクトが良くないという話しもあり、ダクトを削るという手法もあるそうです。これはまだ試していません。
65Xも似たような挙動がありますが、今のところ何もいじってはいません。
[ 75Xでモーターが止まる]
[ 65XのFCボードのピンが半田付け不良 ]
[ 65XのSBUSポートが動かない ]
[ 65Xのプロペラが外れる ] (追記)
今のところ、こんな感じです。
BetaFPV Beta75X 2Sはとても力強くポテンシャルの高いブラシレスなマイクロドローンです。これにRunCam Split Mini 2を搭載してHD画質(1080P 60FPS)での録画が出来るようにしました。
マウントは3Dプリントしたもので上海のFPVドローン師匠の設計です。写真のものはバージョン1で、ただいま進化中です。
カメラもボードもむき出しです。そのためクラッシュでボード上のスイッチがもげてしまいました。この部分は改良の余地ありです。
重量は17gほど増えて450mAhのバッテリーを使用した場合の総重量は88.7gになりました。またRunCam Split Mini 2の消費電力が650mAx5Vもあるのが少し心配です。
実際に飛ばしてみると、オリジナルに比べると重さを感じます。それでもロールくらいは軽くこなせるほどにパワーの余裕はあります。飛行時間は450mAhのバッテリーではオリジナルに比べると2分ほど飛行時間が短くなり、2分半を経過したら何時でも降ろせる状態にしなければなりません。マイクロドローンとしては標準的な飛行時間とも言えます。
VIDEO
PS. ひとつ書き忘れ。Beta65XでもRunCam Split mini2を試してみましたが、今一つでした。飛ぶことは出来ますが燃費が悪すぎます。飛行時間が1分あるかないかくらいになってしまいます。実用的とは言い難いです。
Beta75Xに続いてBetaFPV Bet65Xも飛ばし始めました。こちらも2Sバッテリーで力強い飛び方をします。わずか10mm(モーターの対角線上の距離)ですが小さいと室内でも無理なく飛ばせます。ただ、そのパワー、速度を実感するためには屋外飛行を行わねばなりません。
何と言っても小さな機体です、ブッシュに埋まると探すのが大変ですので、まずはブザーを取り付けました。
75Xはフレームにブザーを取り付けるところがありましたが65Xにはありません。単体のブザーは小さいので、そのままキャノピーに押し込む事にしました。
これで屋外飛行の準備は完了です。
65XのPIDなどは全く弄らずに飛ばしてみました。激しい動きをすると、変な動きがあるようにも思えます。チューンした75Xに比べるとアクロバティックな飛行は難しい気もします。これは私が慣れていないからかも知れません。
普通にビュンビュンと飛ばすだけならば、かなり面白いです。
VIDEO
Beta75Xの電源ケーブルは二つの仕様があります。私が購入したのは1Sバッテリーを二つ使用するタイプのものでした。最初に付いていたものはケーブルも太くしっかりとしたものでしたが、いろいろと改造しているうちに手違いでショートさせてしまいコネクターを焼いてしまいました。
手持ちのPH2.0コネクターを取り付けましたが、これのクオリティが今一つで衝撃で緩んだり、挙句の果てにはピンのカシメが緩くなり電線が抜けてしまいました。質の良いPH2.0コネクターを探そうとも思いましたが信頼性を考えてXT30に交換することにしました。電流の流れを良くするためにBeta65XをXT30使用に変更した人もいるくらいなので、瞬発力も良くなるかもしれません。
[ 電池 ]
BetaFPV純正
59元
7.4V 300mAh 35C/70C
18.1g
2個セット118元で売っていた
XP03002ECO
28.8元
7.4V 300mAh 35C
16.1g
Babyhawk用として売っていた
TATTU
43元
7.4V 450mAh 75C
28.4g
大容量ながら、そのまま75Xの電池ホルダーに入る
XP03002ECOは格安ですがコネクターが違うのでXT30に交換する手間がかかります。そのうえ、実際に飛ばしてみると電圧低下が速くLow Battery alarm(セルあたり3.5V)が数十秒で鳴り始めます。その後、2分以上飛ばせますが今一つ気持ちが悪いので限界まで飛ばすこともなく使用するのをやめました。
TATTUは大容量なので当然重量も10gほど増加します。気持ち飛び方が重くなりますがロールもフリップも普通にこなせるので第三者的に見ていればさほど飛び方は変わっていないのかもしれません
飛行時間は純正電池(300mAh)だと2分半ほどでLow Batteryが出て3分半でLand Nowが出ます。その後もしばらくは飛ぶので場合によっては4分くらい浮いています。 TATTU(450mAh)は4分半でLow Batteryが出て5分過ぎにLand Now、頑張って5分半浮いているくらいの感じでした。TATTUは期待通り長時間飛ばせましたがLow Voltageが出てからの電池の減りがやや速く感じました。普通に飛ばすのは、やはり純正電池が良いようにも思えます。しかし容量が増えて値段が安いのは魅力ですのでどちらを買い足すぺきか非常に悩みます。
左からTATTU 450mAh. BetaFPV 300mAh, ノーブランドXP03002ECO 300mAh
Beta75Xの飛行は99%、屋外でFPVで行っています。そのため予定外の場所に着地した場合、機体が小さいので草むらなどでは目視で発見することは困難です。Beta75Xではmotor beeperも使えるようにはなっていますが、流石にモーターが小さいので実用的な大きさの音を鳴らすことは出来ません。追加でブザーを取り付けるのがお勧めです。
幸いBeta75XのFC にはBuzzer padがありますし、フレーム後方にもブザーを取り付けるところがあり、幅が23mmほどの基板がちょうどはまります。