小型でDVR搭載のドローン用カメラとして初めての4Kビデオが録画出来るCaddx Tarsierを試してみました。
細かいスペックなどは別のところに譲るとして使用感などを書いておきます。まずはトラブルから。
[ NO SDCARD ] We need to use our app to format the TF card “と書かれていました。
[ 録画が数秒で止まる ] FAQ に書いてあります。原因はボードとカメラを接続しているケーブルがボード側で接触不良を起こしていました。コネクターを押さえ続けれると録画出来ます。カメラ側はしっかりと押さえつけられていますが、ボード側は黒い接着剤が付いているものの押さえつけているものがあるわけではありません。
ケーブルは悪くは無いかもしれませんが、予備ケーブルが付属しているのでそれを使うことにしました。ついでにスポンジを張り付けてヒートシンクとの間でテンションが得られるようにしました。
使い勝手は悪くはありません。FPV用とHD録画用のカメラは完全に独立しているのが特徴でもあり面倒なところでもありますが、FPVは一度設定してしまえば触らないですし、割り切ってしまえば問題なしです。Runcam Split mini2やCaddx Turtle V2ではFPV画像が薄い感じがして今ひとつ飛ばしやすくはないのですがTarsierは流石に独立したFPVカメラなので飛ばしやすいです。
残念なのは録画中かどうかがFPVの画面には表示されないことです。ボード上のLEDで確認する必要があります。(追記)
ボードにUART端子があるので接続しRuncam Split Mini2と同様の設定をして録画の開始、停止が出来るか試してみましたが駄目でした。
VIDEO
とり急ぎ飛ばしてみた動画です。ND8フィルターを装着していますが、一説によると晴れていてもNDフィルター無しで良いとの話しもありますので、おいおい検証してみます。また、今回は4K30FPSだけで撮影しましたが、他の解像度との比較もしてみたいです。\
何分にも小さなカメラなので画質はGoProやMavic Pro2とは比較にはなりません。本当に4Kが必要なのか考える必要があるかも。
Betaflightの設定に関して語るのは、いまひとつ気が引けますが私の設定例で活用出来そうなところをかいつまんで公開します。基本的な設定方法については一切触れておりません。
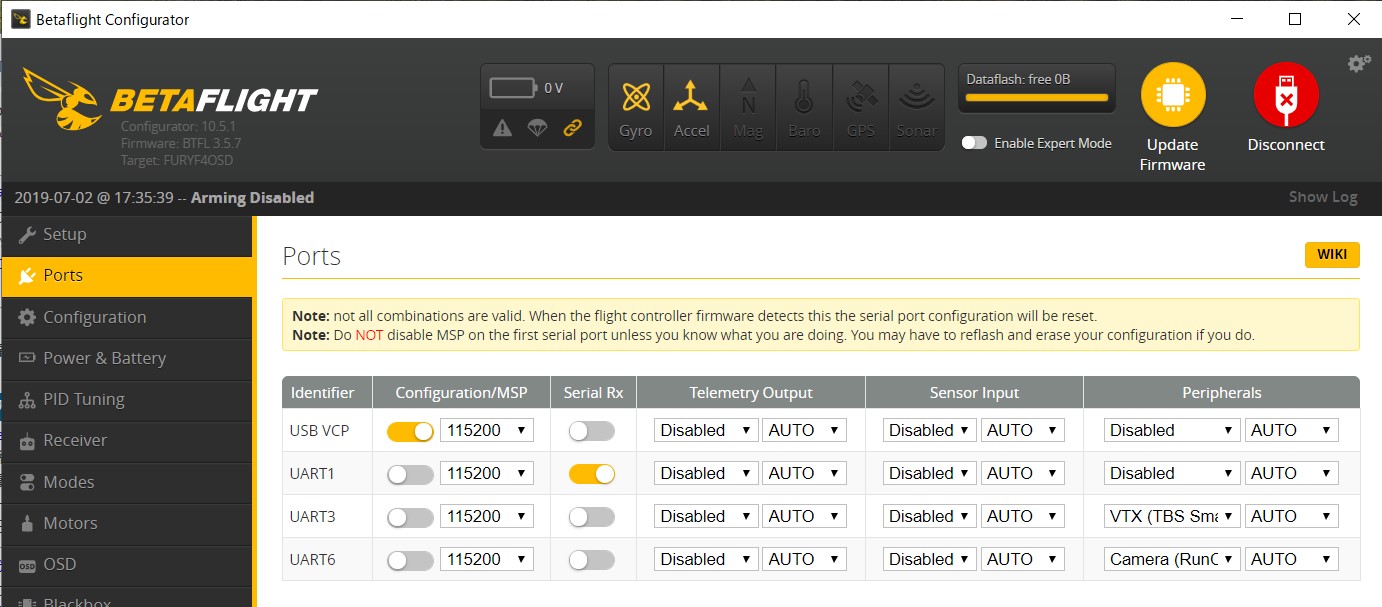
Ports
Configuration
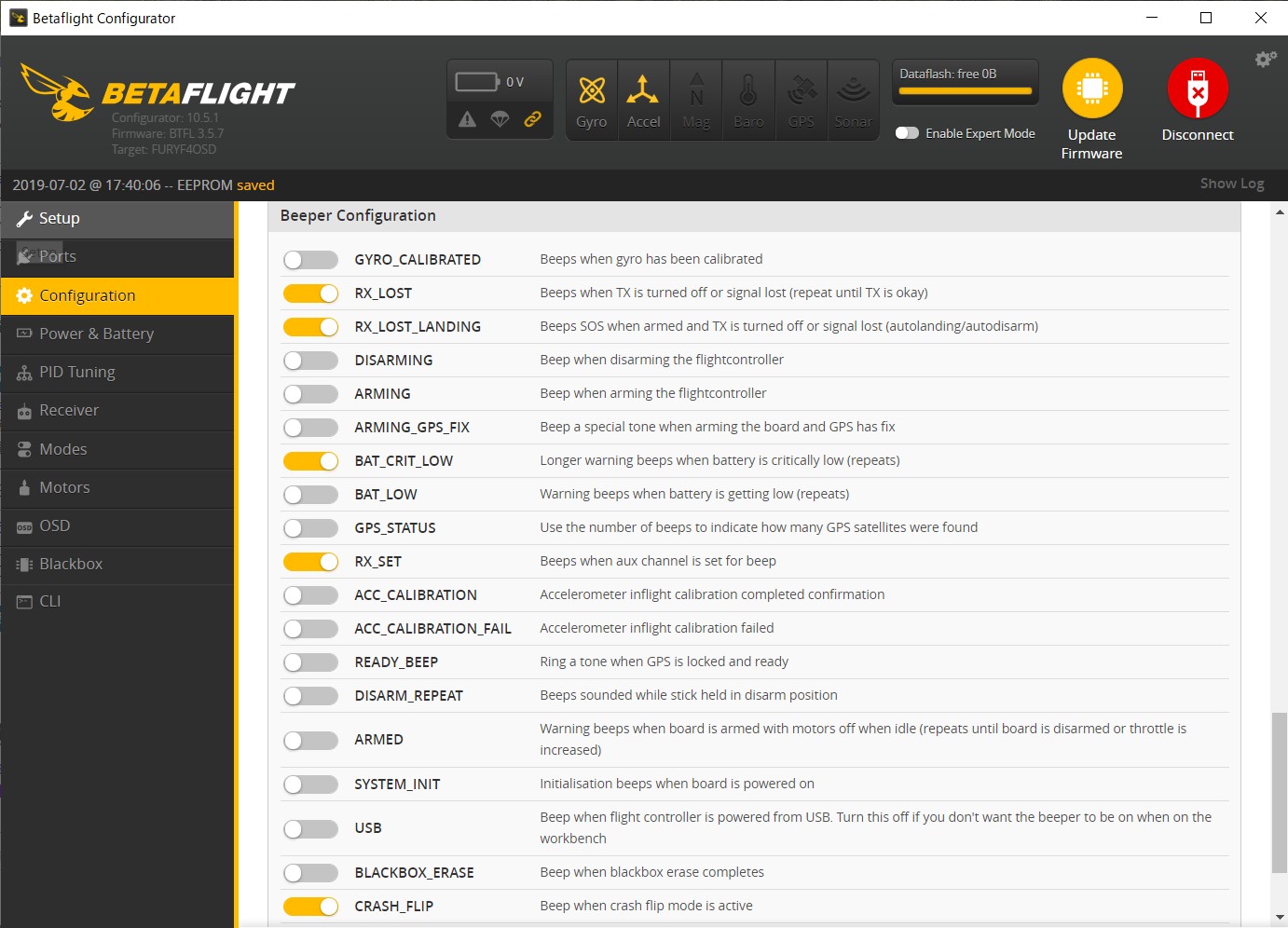
Beep
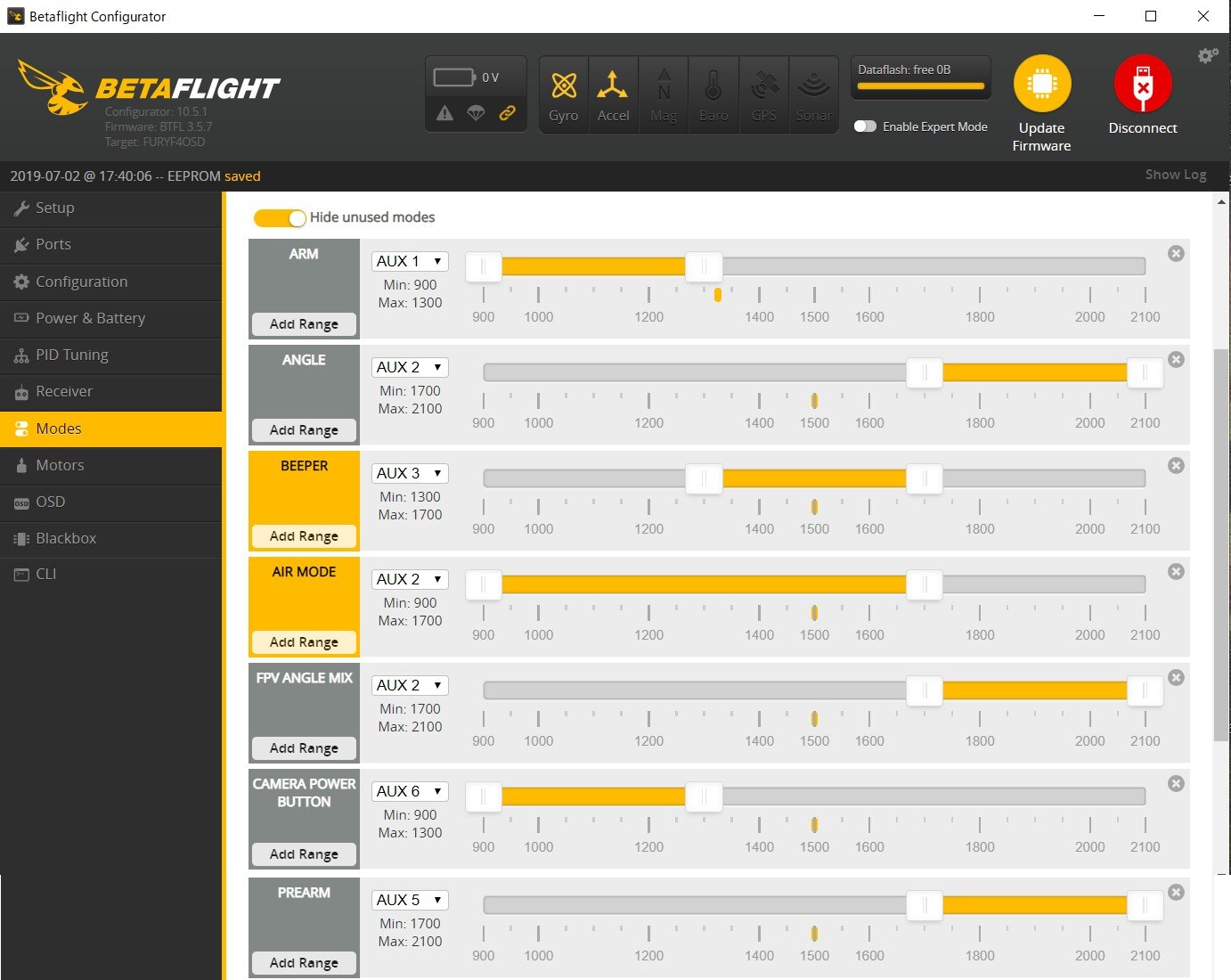
Modes
[ PREARM ]
[ AIRMODE ]
[ ブザー ]
[ VTX関連 ] 最近のVTXだとSmartaudioで送信機からチャネルや出力を制御するのが一般的です。わたしは加えてCLIコマンドでset vtx_low_power_disarm = onを設定てしています。これは例えばVTX出力を500mwに設定しておいてもアームしていない時は最低の25mwにするためのものです。これでVTXが焼けるのを少しでも防ぐことが出来ます。
[ Runcam Split Mini2制御 ]
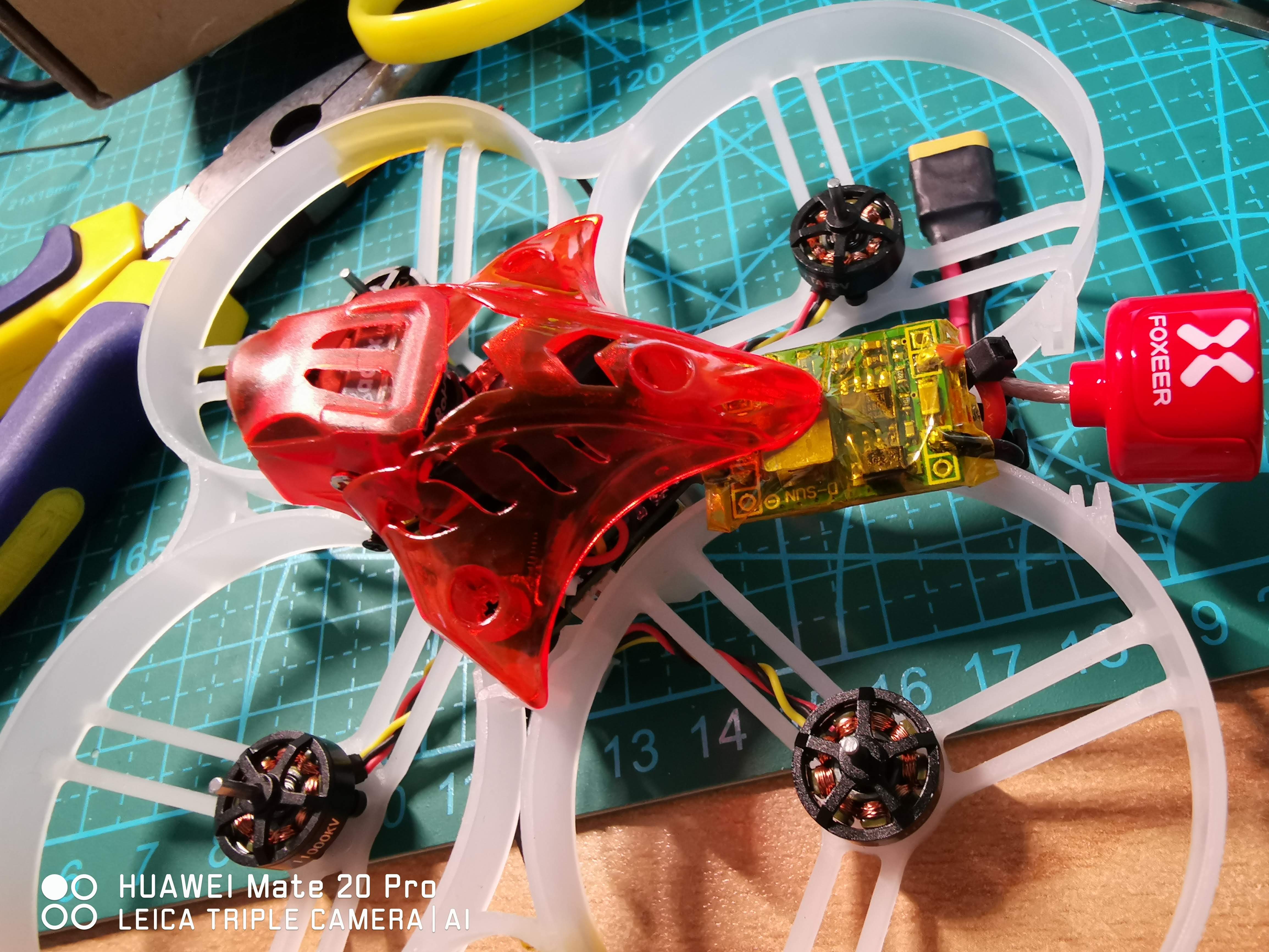
BetaFPV Beta85X用のフレームを利用したブラシレス機にハマっています。そのために幾つかのFC (Flight Controller)試してきましたので、それらについてつらつらと書いていきます。
BetaFPV F4 Brushless Flight Controller and ESC
Crazybee F4 Pro V1.0
キャノピーの後ろに載っているのがあと付けの5Vレギュレーター
Crazybee F4 Pro V2.0
最近流行りのSailfly-XにはCrazybee F4 Pro V2.1 が搭載されています。VTXもコネクター接続になっていたりとV2.0からかなり変わっているようです。気になっていますが未入手です。
HBS-F405 2S
GEPRC GEP-12A F4 Flight Controller 12A ESC BetaFPVのサイト に詳細が書かれています。それによると4S用のモーターは1105 5000KVとなっています。モーターも4Sバッテリーも入手済みですが、まだテスト出来ていません。
発売当初に問題になっていたESCが発火する問題が解決されたバージョンのBeta85Xを入手しました。
最近、Taranis Q X7SにCrossfire Micro TXみを搭載したのでCrossfire受信機搭載のものにしました。ただし85X HDでロングレンジを狙うつもりはありません。
最低限のBetaflightの設定で普通に飛びましたが色々と問題も発生。
[ VTXの電波が弱い ]
[ 電圧の異常 ]
[ プロップウオッシュ ]
[ Fly away ]
=> その後、送信機のスロットルに不具合が見つかりました。おそらく原因は送信機側にあったものと思われます。
– Betaflight 更新 –
色々と問題もあるのでBetaflight 3.5.0から4.0.0に更新しました。PID値は3.5.0のメーカー設定のものを使用して、“4.0 Tuning Notes” の“I’ve already got a perfect tune on 3.5, I just want it to fly the same” の設定を行いしまた。ただし文章中に書いてあるI値を小さくするのを忘れたまま飛ばしていましたが、かなり調子よいです。この設定をベースに微調整していく予定です。
BetaFPVのBeta85X用のフレームに既存の75mm 2SブラシレスのFCとモーターを移植して飛ばすのがとても楽しいです。適当に普通に飛びそうな2S機であれば、そのまま85mmフレームに載せて2インチプロペラに付け替えるだけで、パワフルで優雅な飛行を楽しめます。75mm機で気になっていたプロップウオッシュとそれに伴う予測不能な挙動もほとんどなくなります。
この構成はShutterBug85 とも呼ばれています。私自身もMr ShutterBugのこのYouTubeビデオを見て作ることにしました。
常にメインテナンスと飛行の繰り返しなので仕様は変わっていきますが、今までに作った二機の仕様を紹介します。
[ 一号機 ]
[ 二号機 ]
だいぶ前に書きかけていて放置していた記事ですが、T8SG PLUSが技適マーク付きになったとのことで掘り起こしてきました。
わたしはDeviation化したWalkera Devo10と最初からDeviationで動いているJumper T8SG PLUS を使用しています。最初はDevo10用に作られたTemplateをT8SGに流用していました。スティックをいくつかReverseするだけで使用できていましたが、時折りおかしな状態になります。FCに接続できていますがスロットルだけ動かなくなります。送信機のモニターでは動作しているのですがBetaflight Configuratorの受信機タブではスロットルが動かないという不思議な現象です。
解決策は単純でT8SGでスクラッチからモデルを作ることです。慣れてくればさほど時間はかかりません。唯一ややこしいのは3点スイッチの動作です。覚書的にこの設定方法だけを書いておきます。
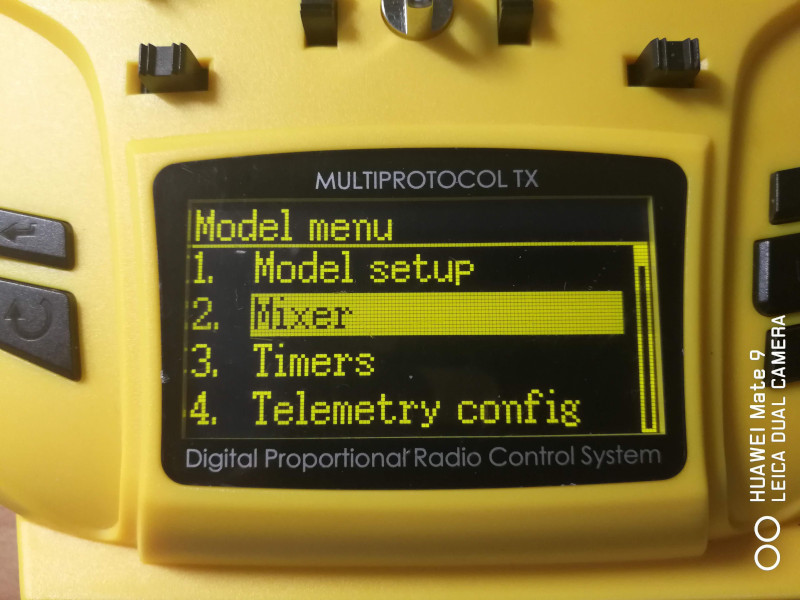
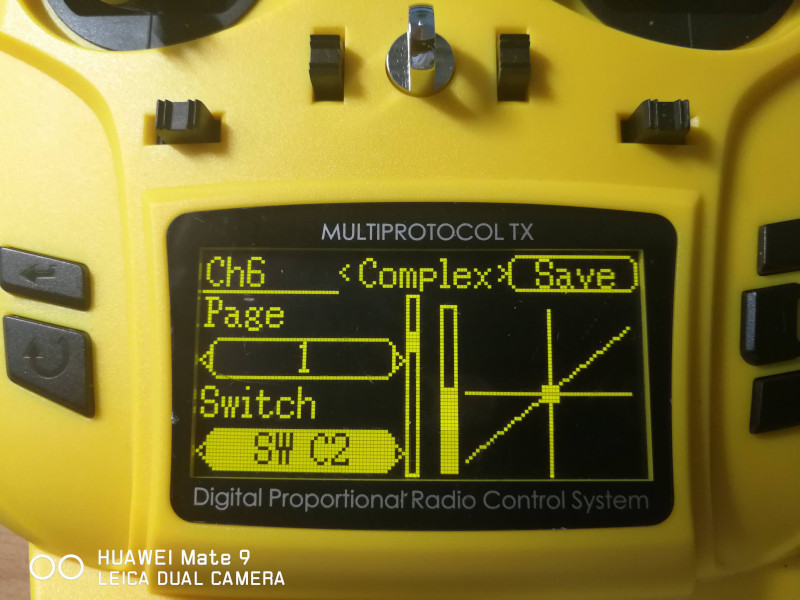
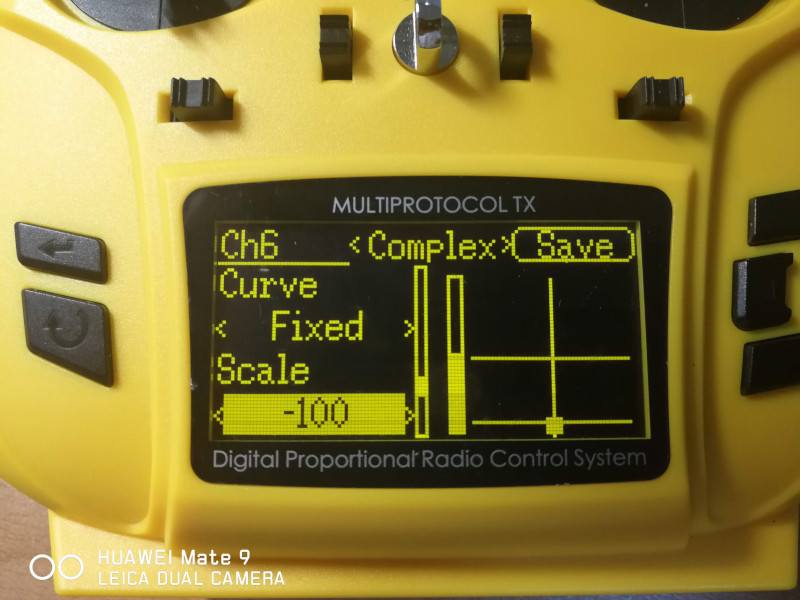
T8SGのSW CをCH6に割り当てる例です。
– Model menu/Mixerを開きます。
– Ch6の横にNoneと表示されているのでNoneのところを選択してEnterします。
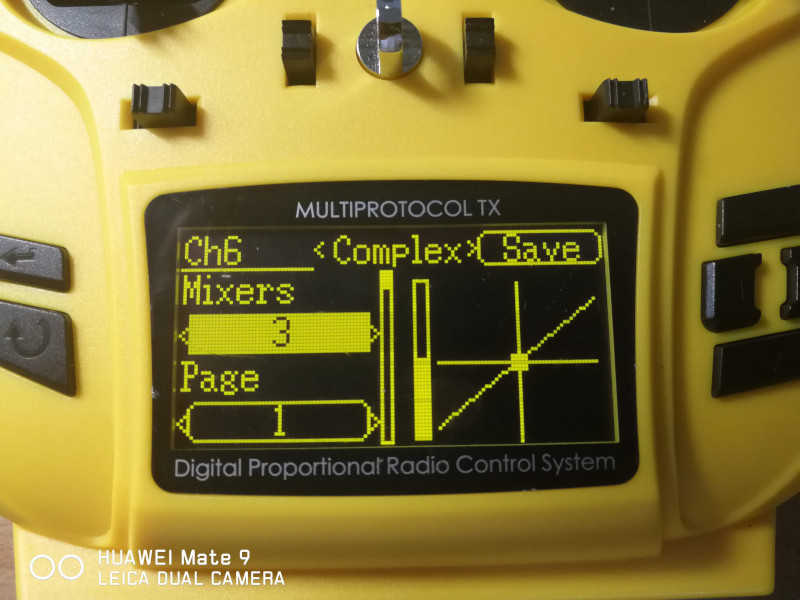
– NoneのところをComplexに変更します。
– Page 1/Switch: SW C2 (Switchを選び実際のスイッチを該当のポジションにすれば自動的に入ります)/Mux: replace/Src: None/Curve: Fixed/Scale: -100
– Page 2/Switch: SW C1/Mux: replace/Src: None/Curve: Fixed/Scale: 0
動作の確認はTransmitter menu/Channel monitorで行えます。
以下、モデルファイルから該当部分を抜き出したものです。[channel6]
技適マークがあるかどうかは販売元にお問い合わせください。
覚え書きです。日本では技適な問題があって使えないTipsかもです。
私がFrSkyの受信機のファームウェアを書き換える目的は二つです。XMもしくはXM+をRSSIを取れるようにするためとR-XSRをFPORT仕様にするためです。
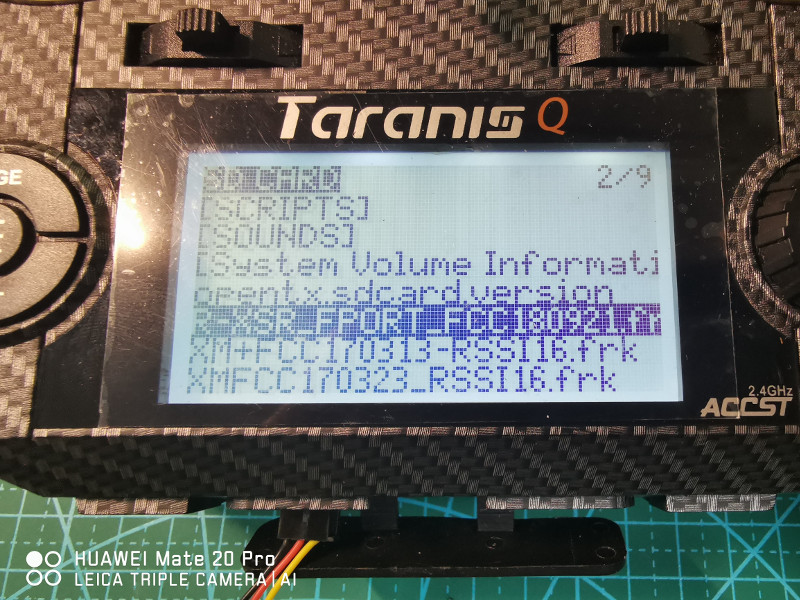
更新にはFrskyの送信機Taransi QX7Sを使用しました。
[ ファームウェアの準備 ] ダウンロードページ にあります。
[ 受信機の接続 ]
[ ファームウェアの更新手順 ]
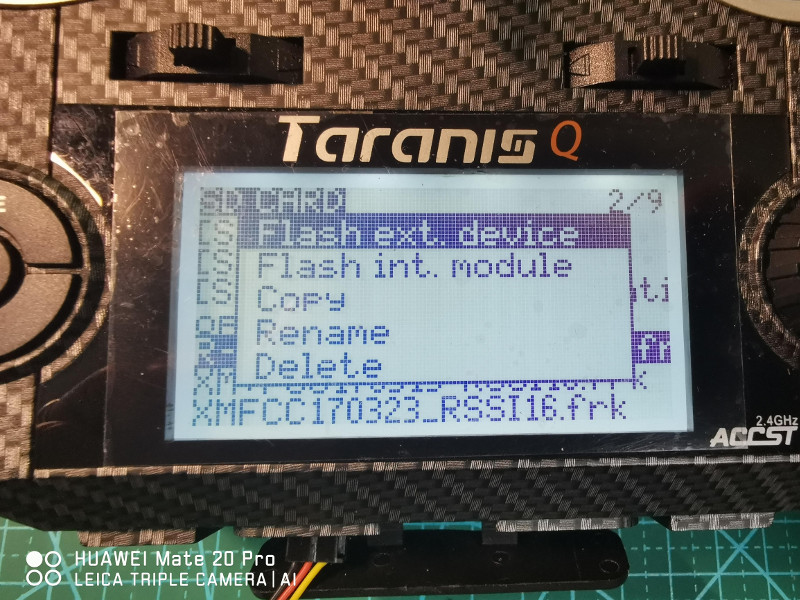
– 右のダイアルを回して目的のファームウェアファイルを選択します
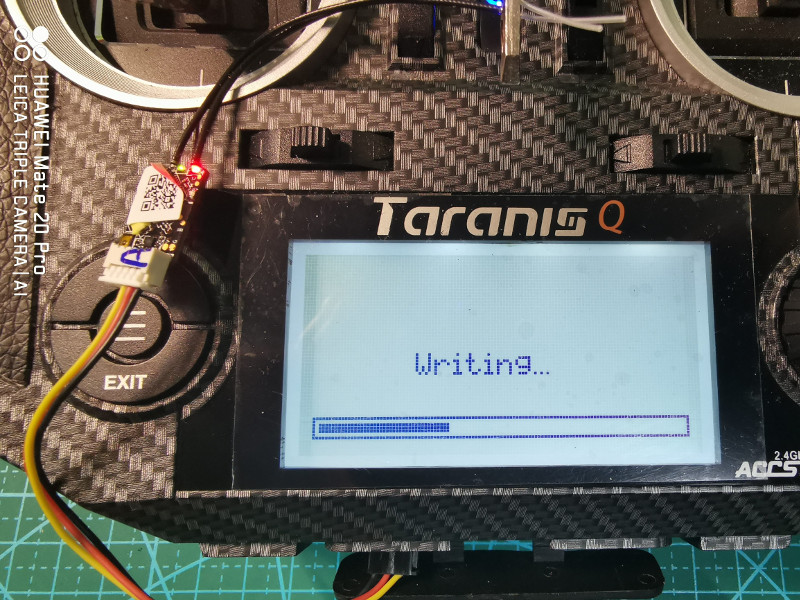
– 右のダイアルを長押し、メニューからFlash ext. deviceFlash S.Portを選択するとファームウェアの更新が始まります
Beta75XのFC/ESC/Motorを載せるためのフレームを3Dプリンターで出力すべく設計してみました。
目的は、3Dプリンターで出力したフレームで実際に飛行が可能であることの検証とBeta75XのYaw Washout問題がダクトの無い機体では発生しないことの確認です。
VIDEO
目的は概ね達成しました。ちゃんと飛びましたしYaw Washoutらしき挙動もまったくありません。ただし、FC/ESCが不調になったため検証のための飛行時間がだいぶ短いです。あと、細かな振動が発生して画像が揺れています。これも解決したかったのですが、FC/ESCの不調によりかないませんでした。
せっかくデザインしたフレームなのでThingiverse にて公開しました。
一般的には送信機をUSBでパソコンに接続してシュミレーターを動かします。それでも問題はありませんが、ケーブル無しで操縦できる方が取り扱いが楽なのは間違いありません。
USBドングルの形になった専用品も販売されていますが(下のアマゾンリンク参照)、手元にある使っていないFCと受信機でもシュミレーターに接続することが出来ます。手順は簡単ですが、いくつかヒントを書いておきます。
[ F4が必要 ]
[ 受信機がUSB給電で稼働すると便利 ]
左は受信機がSPI接続でオンボード搭載。右は3.3Vで動くDSMX受信機をFCに接続したもの。
[ 設定 ]
set usb_hid_cdc = on
save
を投入するだけです。
このために専用のFCを用意することなく実際に飛行するドローンをこの目的で使用することも当然できます。LiPo電池を接続する場合はVTXのオーバーヒートに注意してください。
[ 関連記事 ] FPVシュミレーターのススメ (2018/07/22)FPVシュミレーターのススメ設定編 -1- Freerider Windows用モデルの作成 (2019/01/25)FPVシュミレーターのススメ設定編 -2- Deviationのファームアップデート (2019/01/29)
FPVシュミレーターで主に使用するT8SG Plusで少し問題がありました。Windowsでは出荷された状態で使えるのですがMacBookにつなぐとスティックに反応はするもののマウスポインターが暴れ回って使い物になりません。これはDeviationそのものに問題があり、新しいバージョンでは解決しているらしいことが分かりました。
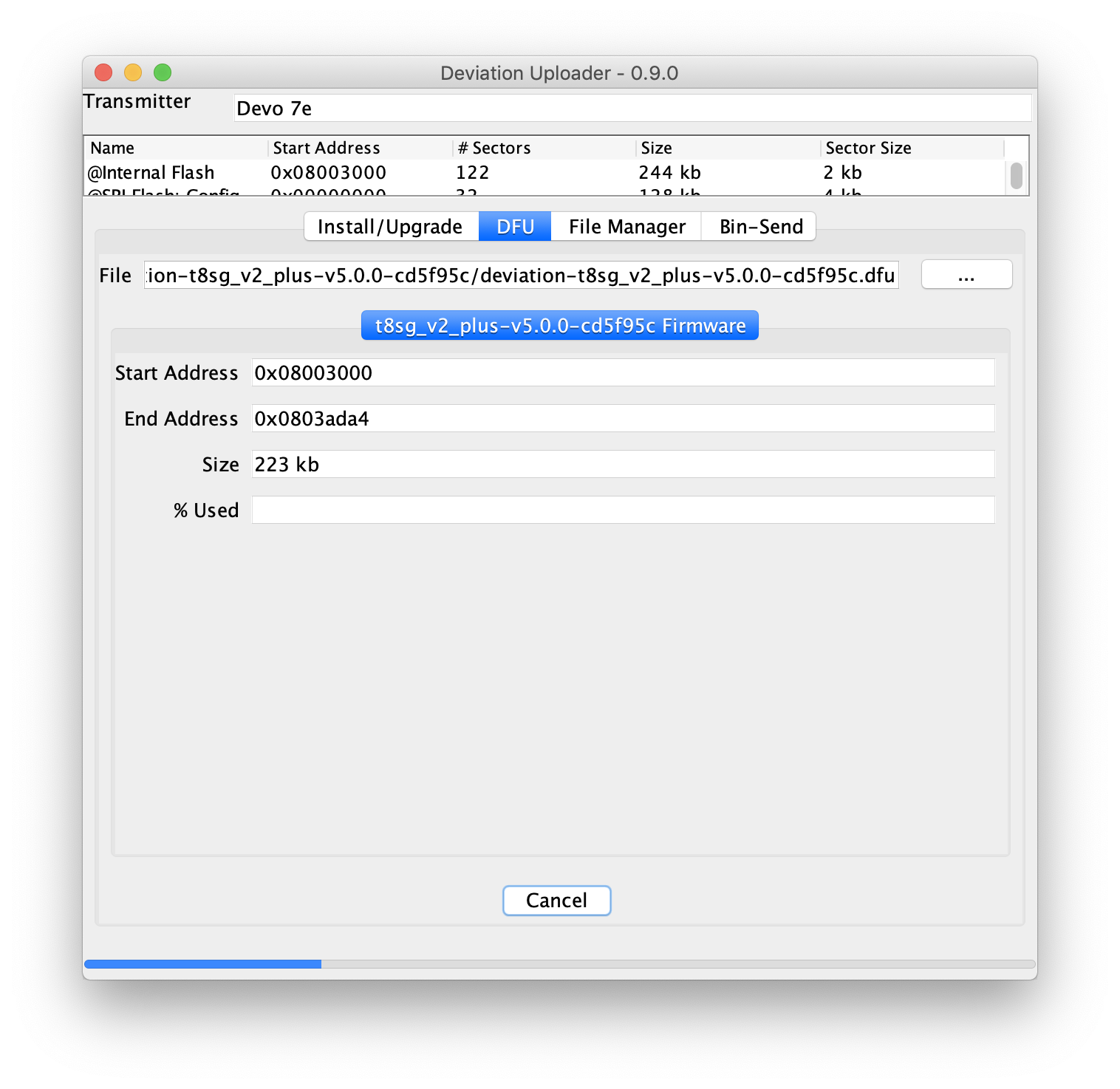
ファームウェアの更新は難しくはありません。問題はどのファームウェアを導入したら良いかということです。というのもDeviationの正式リリース版は5.0.0しかなく、これは何年も前のものです。新しい機能や修正されたもの、また新しい機種用のファームウェアはNightly Builds というところから適当にダウンロードしなければなりません。Nightly Buildsというのは日々更新されるファームウェアが置いてある場所で、本当に正しく機能するかどうかは試してみないことには分かりません。
今回、手順を検証するにあたり2019-01-29版のT8SG V2 Plus用ファームウェアを導入してみましたが、構成画面でEXITキーが効かない問題がありました。仕方なく、もともと使用していた2018-07-10版に戻しました。時々Deviation Forumに動くバージョンが張り付けてあったりもしますが、なかなか正しいバージョンを見つけるのに苦労しますので、なるべくならアップデートしたくないものです。
そんなわけでリスクはありますが、簡単にアップデートの手順を書いておきます。正式な方法は各機種のDeviationマニュアルに書かれています。
今回はDeviation Uploader 0.9.0 というJavaで書かれたツールを使用しました。MacOSで試しましたがWindowsでも動くはずです。DFUモードのドライバーの導入が別途必要となりますがFPVドローンをやっている方はすでに導入されているものと思います。
1. DedviationUpload-0.9.0.jarを起動する(Java Runtimeが必要となります)。
以上でファームウェアの更新は完了です。
[ 関連記事 ] FPVシュミレーターのススメ (2018/07/22)FPVシュミレーターのススメ設定編 -1- Freerider Windows用モデルの作成 (2019/01/25)FPVシュミレーターのススメ設定編 -3- 送信機の無線接続 (2019/01/31)