前回、フィルターの設定が出来ました。いよいよPIDを設定していきます。
まず最初にBetaflight ConfiguratorをExpertモードにしておきます。(上の方に小さく書かれているやつです)
[ 基準値 倍率設定(Master multiplier)の決定 ]
最初に動的ダンピング(Dynamic Damping) D Maxを0にします。この状態で倍率設定(Master Mulitplier)を1より少し小さい値から0.05ずつ上げ、実際に飛ばしてみます。このステップは全くの体感で行います。細かい調整は後から行うので心配は要りません直感を信じて進めます。
倍率設定を上げていくとだんだん反応が良くなります。それがあるところを超えるとまた反応が悪くなったり、モーター音の異常、モーターの加熱が発生します。気持ち良く飛ばせる中で一番高い数値にしておきます。
私の場合は1.25に設定しました。
[ 動的アイドル値(Dynamic Idle) ]
動画中にある表を参考に設定します。65サイズが書いてないですし、プロペラのピッチによる設定値の幅が大きいので、大体のところで100にセットしてみました。
[ PDバランス ]
これからが本番です。最初に技術的な背景を簡単に紹介します。プロポのスティックを操作すると、それがFCで解釈されてYaw/Pitch/Rollのセットポイントという値が作り出させれます。これはその操作を行った時にジャイロが作り出す値の目標となる値です。FCは各モーターを動かしジャイロの出力がセットポイントを追従する様に制御します。その追従の具合を調整することがPIDチューニングです。

「動的ダンピング D Max」, 「スティックレスポンス FF」, 「ドリフト-ふらつき I」を全て0にします。
「トラッキング P&I強度」を0.5から0.05ずつ上げながら20秒ほど飛行しログを取ります。PIDtoolboxでStep Resp Toolで波形を見ます。オーバーシュートしない程度で素早く立ち上がるPの値をRollとPitchでそれぞれ記録します。
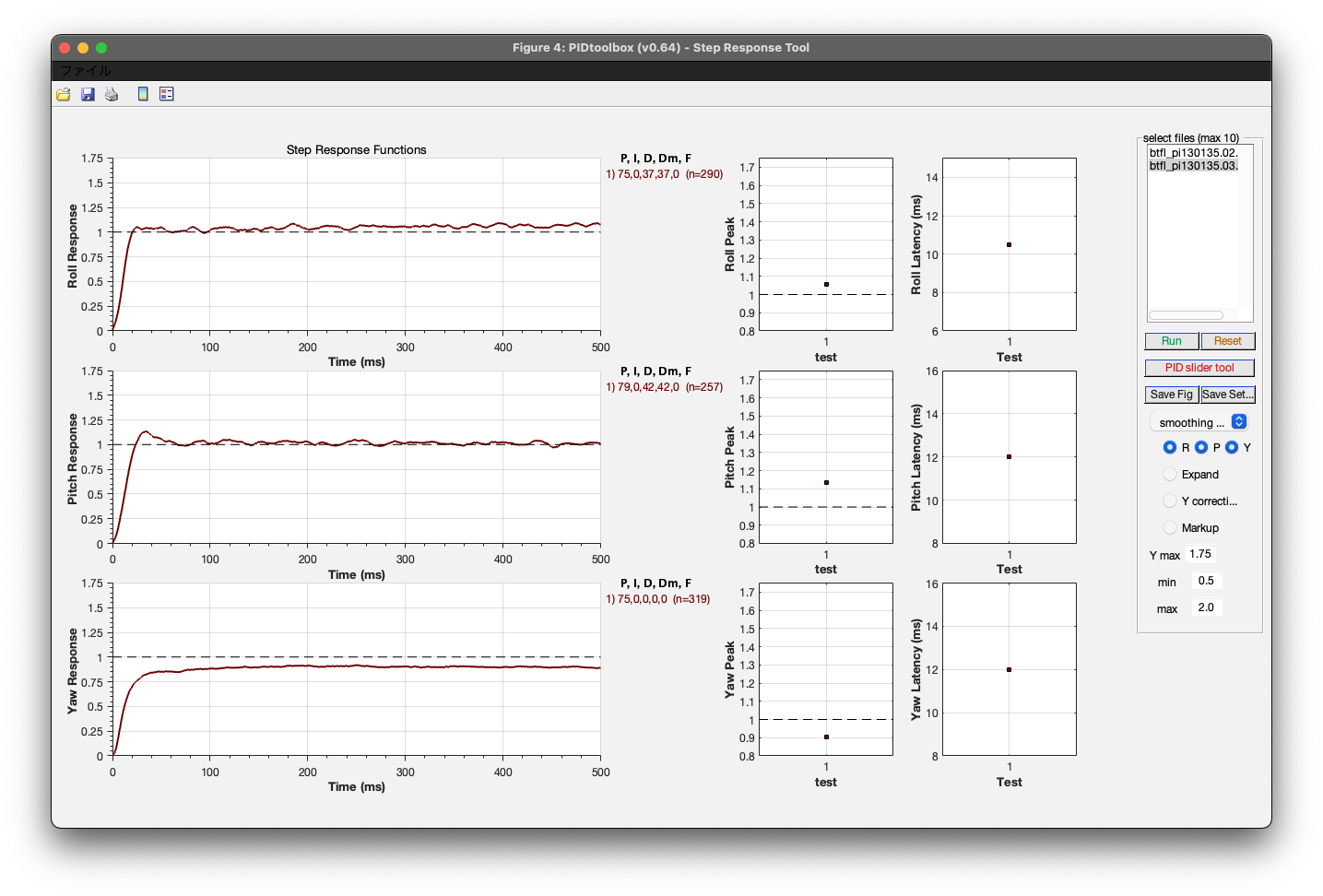
これはP&I=1.35にした時の状態です。Rollは良い値が出たところです。Pitchはややオーバーシュートしていますので、もう少し小さな値が良さそうです。
私は、RollはP&I=1.35, P=75、PitchはP&I=1.20, P=70を採用しました。
もし、この調整でスライダーが右端まで行ってしまった場合は最初の「基準値 倍率設定」の数値が足りていないのだと思われます。
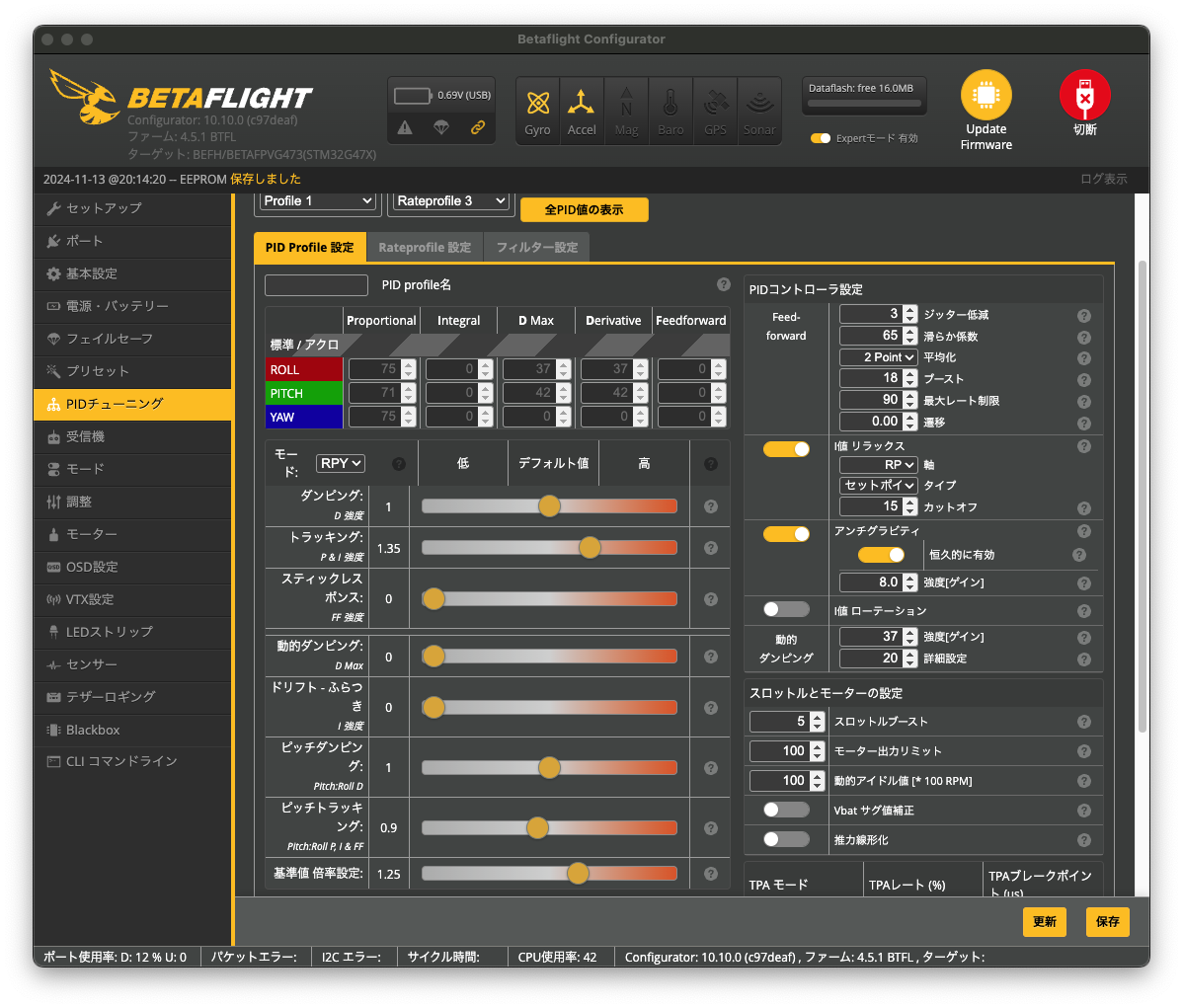
「トラッキング P&I強度」スライダーでRollのP値を75にします。これは調べた時の値ですのでP&I=1.35になります。
「ピッチトラッキング」スライダーを調整してPitchのP値を70にします。実際にはスライダー0.9でP=71としました。
これでPDバランスの調整は完了です。
[ ドリフト、ふらつき I 強度 ]
I値は共用範囲が広いのでBetaflightの規定値でも大丈夫かも知れません。大きい方がレスポンスが良くなりますが大きすぎると振動やバウンスバックが出ます。私は今のところ、なんとなくスライダーを1.0にしています。初期値は80/84/80で現在値は135/127/135とだいぶ大きくなっています。もっと小さくすべきかも知れませんが、これでしばらくテストしてみます。
[ Feed forward ]
スライダーではなく右の方にある各値はプリセット/RC_LINKで適切な値を選択することで設定されます。
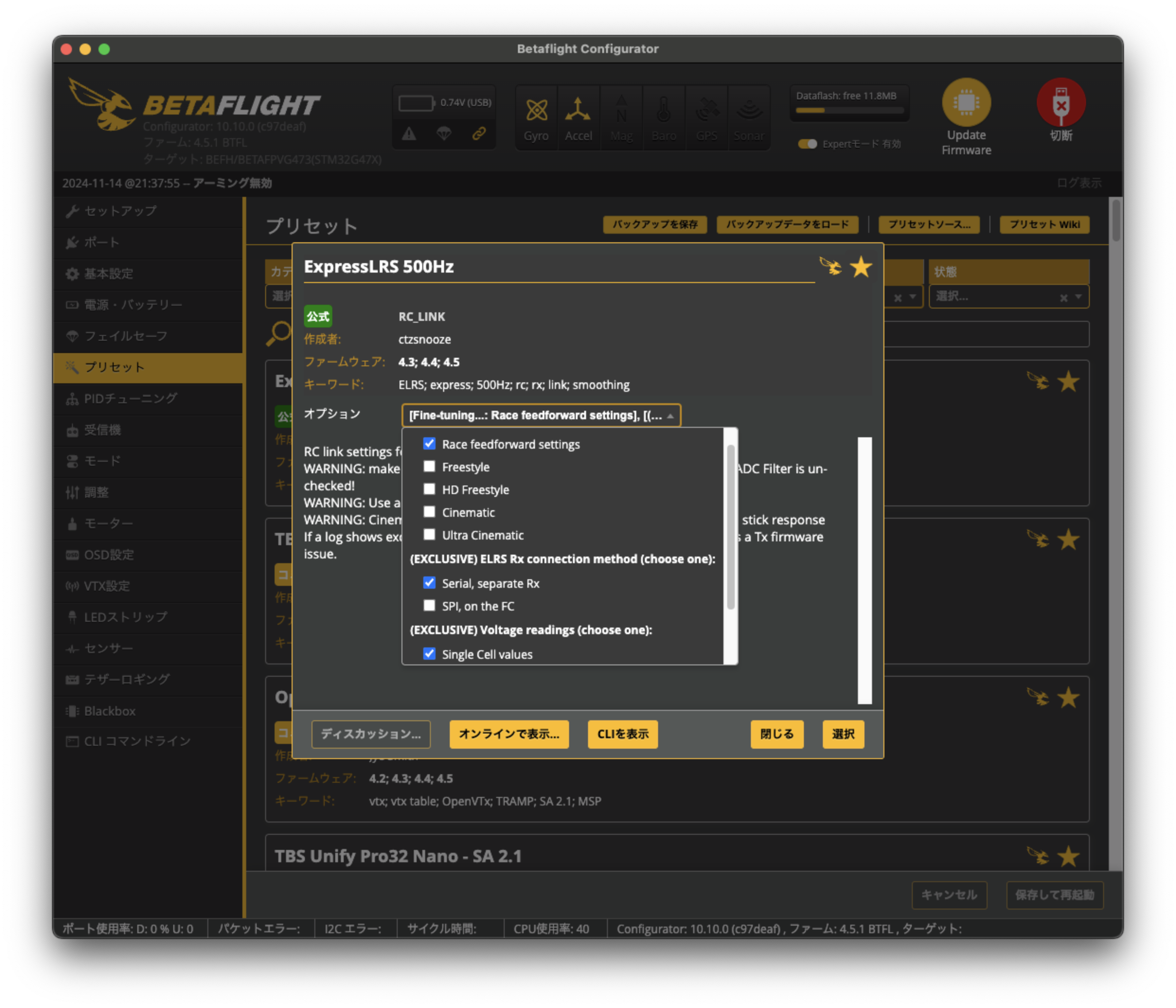
私の場合はELRS 500Hz, Race, Serial RX, Single cell valueで設定しています。
FFのスライダーはとりあえず1.0にしておきました。
[ 動的ダンピング ]
強度=37,詳細=0に設定します。
[ 動的ダンピング D Max ]
動的ダンピング(D Max)が0の時は上の数値欄にあるD MaxとDerivativeに同じ数値が出ているはずです。これを記録します。「ダンピング D強度」のスライダーを下げ「動的ダンピング D Max」のスライダーを上げてD Maxを記録した値、Derivativeをそれより少し小さい値にします。私の場合は「ダンピング D強度」を0.75, 「動的ダンピング D Max」を1.0にしました。まったり飛行の場合は、もっと差を小さくした方が良いかも知れません。
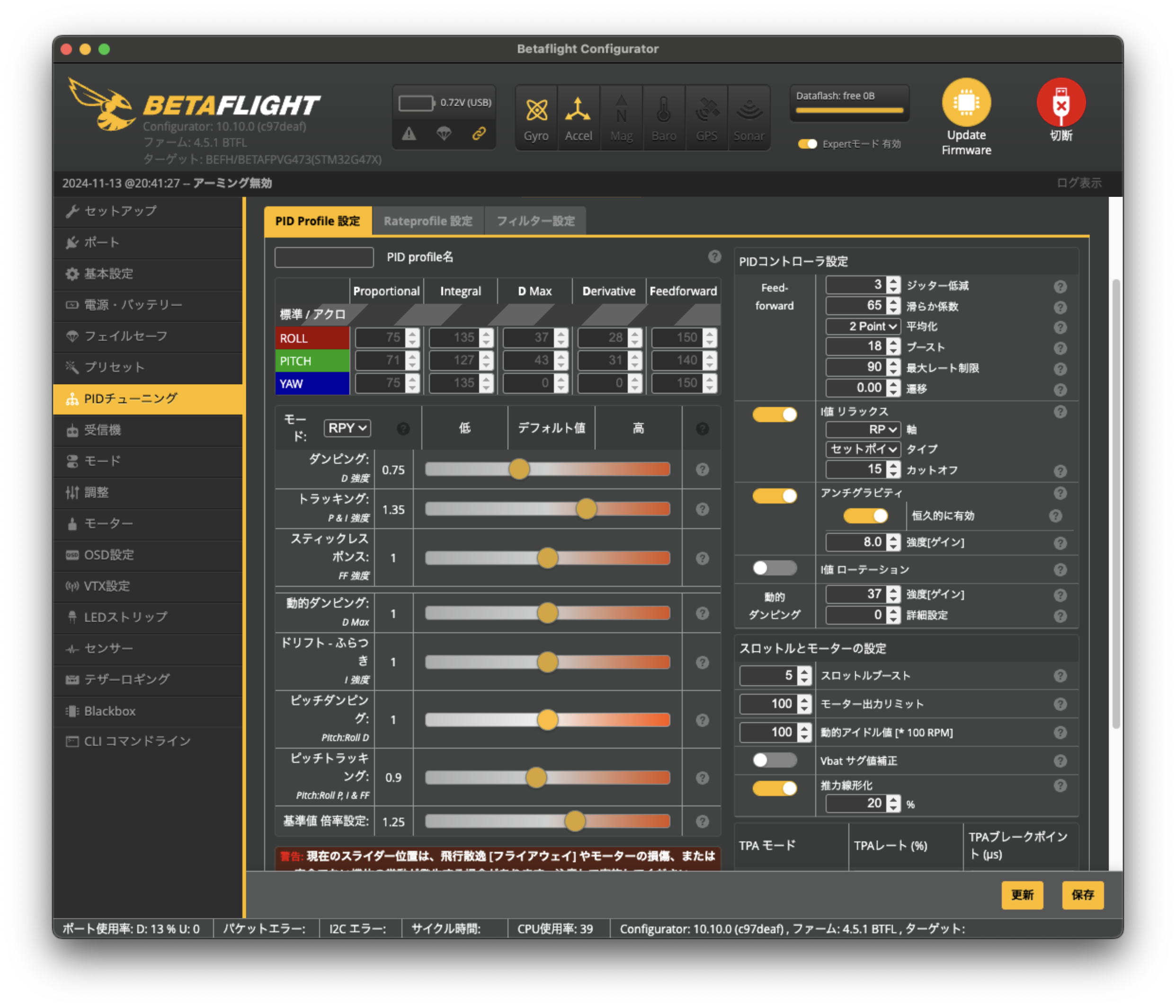
最終的なPID画面はこんな感じになりました。これでしばらく飛ばしてみようと思います。
no comment untill now