以前、書いた「室内でPIDチューニング」のBetaflight 4.5版です。前回と同じくChris Rosser師匠のYouTubeビデオに基づいた内容になっています。細かいところは除いて私が実際に試した部分だけを書いています。詳細については以下のYouTubeをご覧ください。
Betaflight 4.5 PID Tuning
Betaflight 4.5 Filter Tuning
[ PIDtoolbox ]
PIDtoolboxを使用します。ちょっと前までは無料でダウンロード出来たのですが今は月会費を支払ってダウンロードします。一年前くらいの無料時代の物でも今回のPIDチューニングには使用出来ます。
PIDtoolboxの導入方法と基本的な使用方法は以下の記事をご覧ください。
– PIDToolbox v0.62
– PIDToolbox v0.62を使う
Windows版もMac版も導入方法や使い方は同じです。最新のMacOSでは最初のプログラムの起動が少し面倒になりました。ダウンロードしたプログラムがうまく起動せずゴミ箱に入れますかなどと聞かれます。これを解消するにはターミナルを開いて以下のコマンドを投入しなければなりません。
xattr -c {PIDtoolboxのディレクトリー名に置き換える}/main/PIDtoolbox.app
xattr -c {PIDtoolboxのディレクトリー名に置き換える}/main/blackbox_decode
[ 今回使用した機体 ]
BetaFPV Meteor65 Frame, BetaFPV Air 5in1 FC, BetaFPV 0702-30000KV motor, HQ UltraLight Prop
Betaflight 4.5.1です。
新しいBetaFPV Air FCはBlackBox用に16MBのストレージが搭載されているのでPIDチューンがとても行いやすいです。
[ フィルター設定 ]
前提はRPMフィルターを設定済みであることです。
フィルターは可能な限り軽い方が良いです。軽いというのは設定るフィルターの数を少なく、また設定する周波数を高くすることです。生のGyroデータには沢山のノイズ(機体の本来の動きとは別のもの)が含まれます。それをフィルターで出来る限り取り除いてからPID処理に入れます。問題はフィルターにより必ず遅延が発生することです。その遅延はフィルターが一つ増えれば、その分増えます。また、低い周波数を見極めるのには高い周波数より時間がかかります。
実際のフィルター設定は簡単です。Chris Rosserさんの推奨値でたいていの場合は問題ないと思います。

画面の通りです。Betaflight規定値と違うのは
– ジャイロローパス1 = オフ
– ジャイロローパス2 = 1000Hz (もし基本設定でGyro周波数とPID周波数を同じにしている場合はこれもオフにする)
– 動的ノッチフィルター = オフ (もし機体の固有振動によるノイズ出たら改めて考える)
– D値ローパス1 = 動的/80/110/7/BIQUAD
– D値ローパス2 = オフ
これでモータの異音、加熱、機体の振動がなければ基本的には問題なしです。
RPMフィルターの高調波として3が指定されています。これはモーターの回転から引き起こされる振動とその正数倍の振動を考慮したものです。この高調波がプロペラの羽の数によって違うという予測があります。私は入れていませんが、それを考慮して以下のコマンドをCLIで入力すると良いよとChris Rosserさんは言っています。
3枚羽の場合は、set rpm_filter_weights = 100, 0, 80
2枚羽の場合は、set rpm_filter_weights = 100, 80, 0だそうです。
では、ログを取ってみます。まずはBlackboxページでデータの消去を行います。その後で普通に飛行します。スロットル位置ごとのデータが必要なのでなるべくゆっくりと幅広くスロットルを動かします。20秒ほど飛べば大丈夫です。アクロ、アングルどちらでも構いません。クラッシュ、もしくは着陸したらすぐにDisarmします。
ログファイルを取り出しPIDtoolboxに読み込みSpectral Analyzer/’Freq x Throttle’/Runでグラフが出ます。
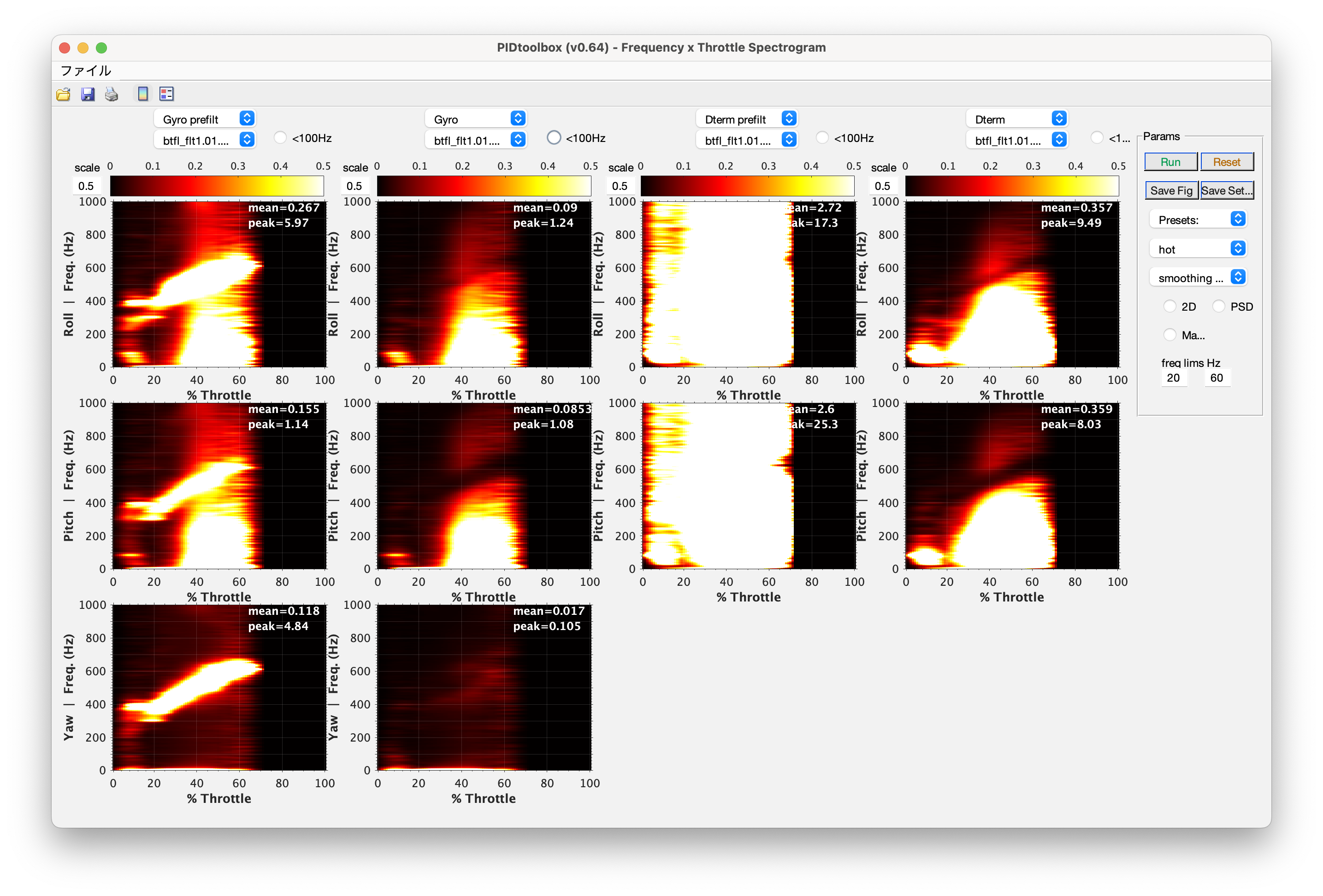
で、実際に取ったデータです。これは実は良くない状態です。横軸がスロットルで縦軸はジャイロデータに含まれる周波数成分です。PID演算において本当に欲しい機体の動きは100Hz以下に現れます。それ以上の部分はノイズ(ほとんどは何かしらの理由による機体の振動)です。このデータではスロットル30%以上の部分に太い帯が見えます。これは明らかな異常振動です。
機体を点検したところひとつのペラが曲がっていました。

ベラを交換して再度データを取りました。
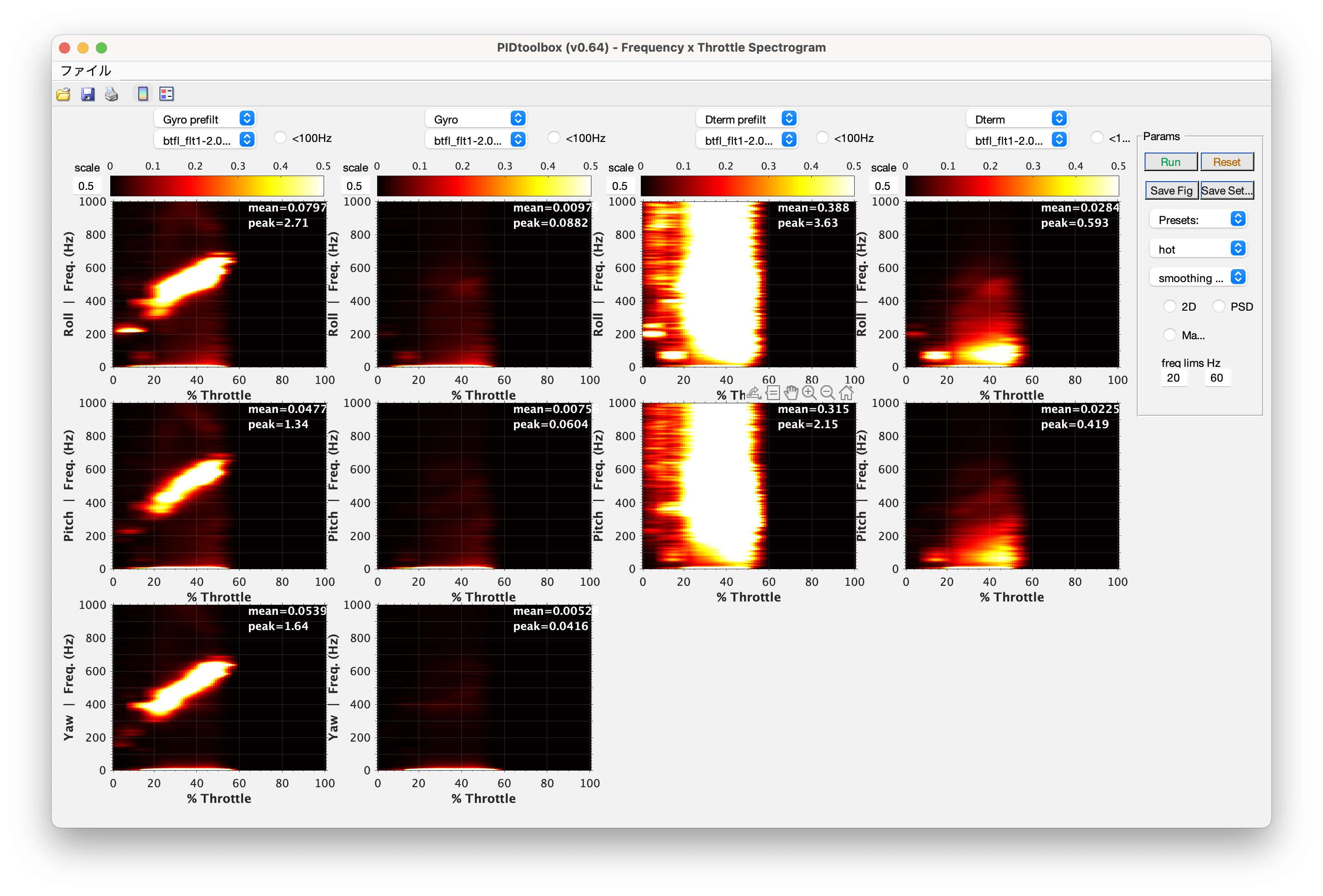
今度は大丈夫そうです。一番左側はフィルターをかける前のジャイロデータです。左下から右上に向けて斜めの太い帯が見えます。これはスロットルポジション、すなわちモーターの回転数に比例して周波数が高くなるノイズ群です。これを効果的に取り除くのがRPMフィルターです。左から二つ目のグラフがフィルターをかけた後のデータです。とてもうまくフィルターされているのが分かります。Dtermについては多くは語りませんが、まあこれで良いかなと思います。
長くなるのでPIDチューニングについては次の記事にいたします。
no comment untill now