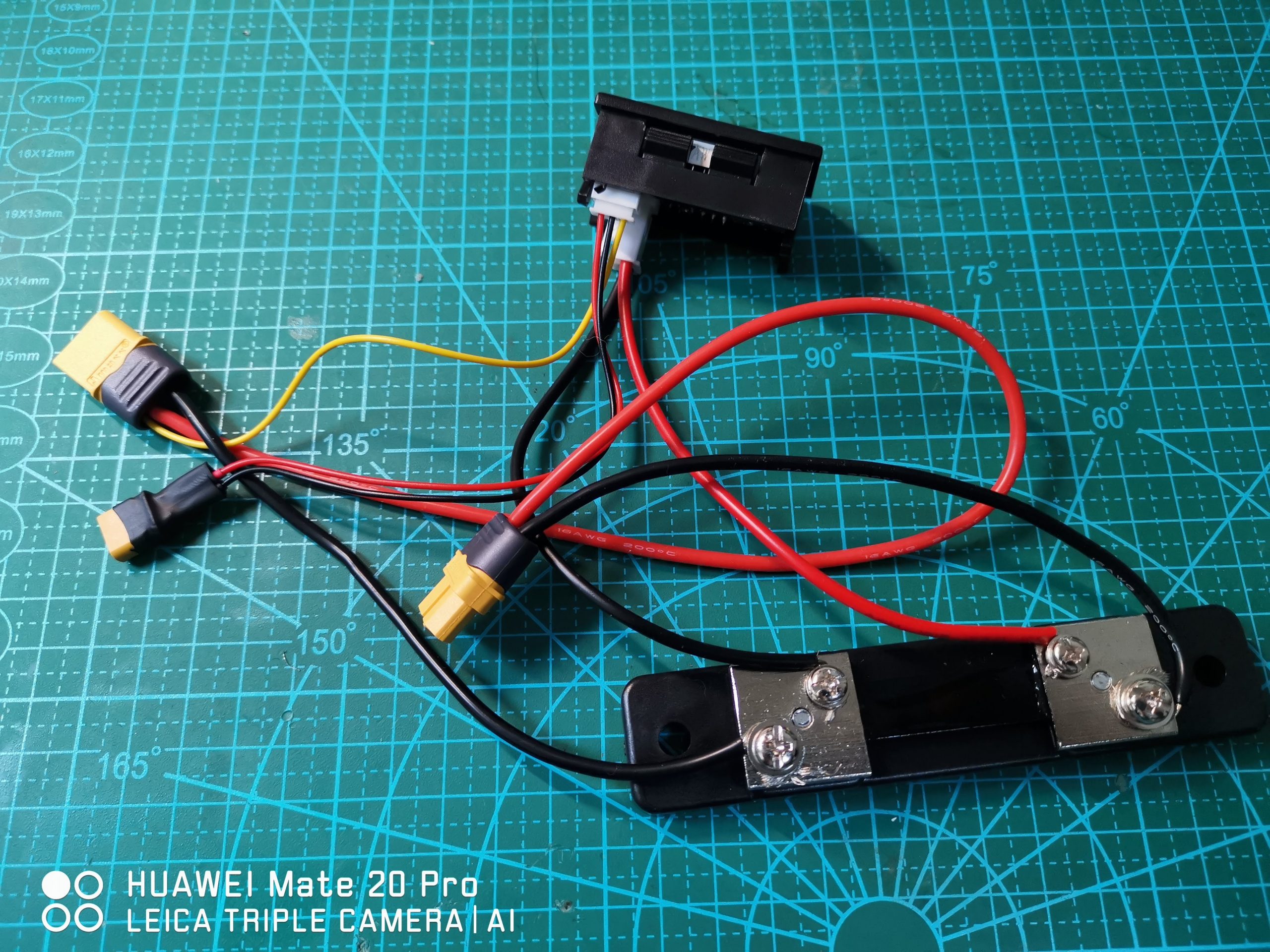
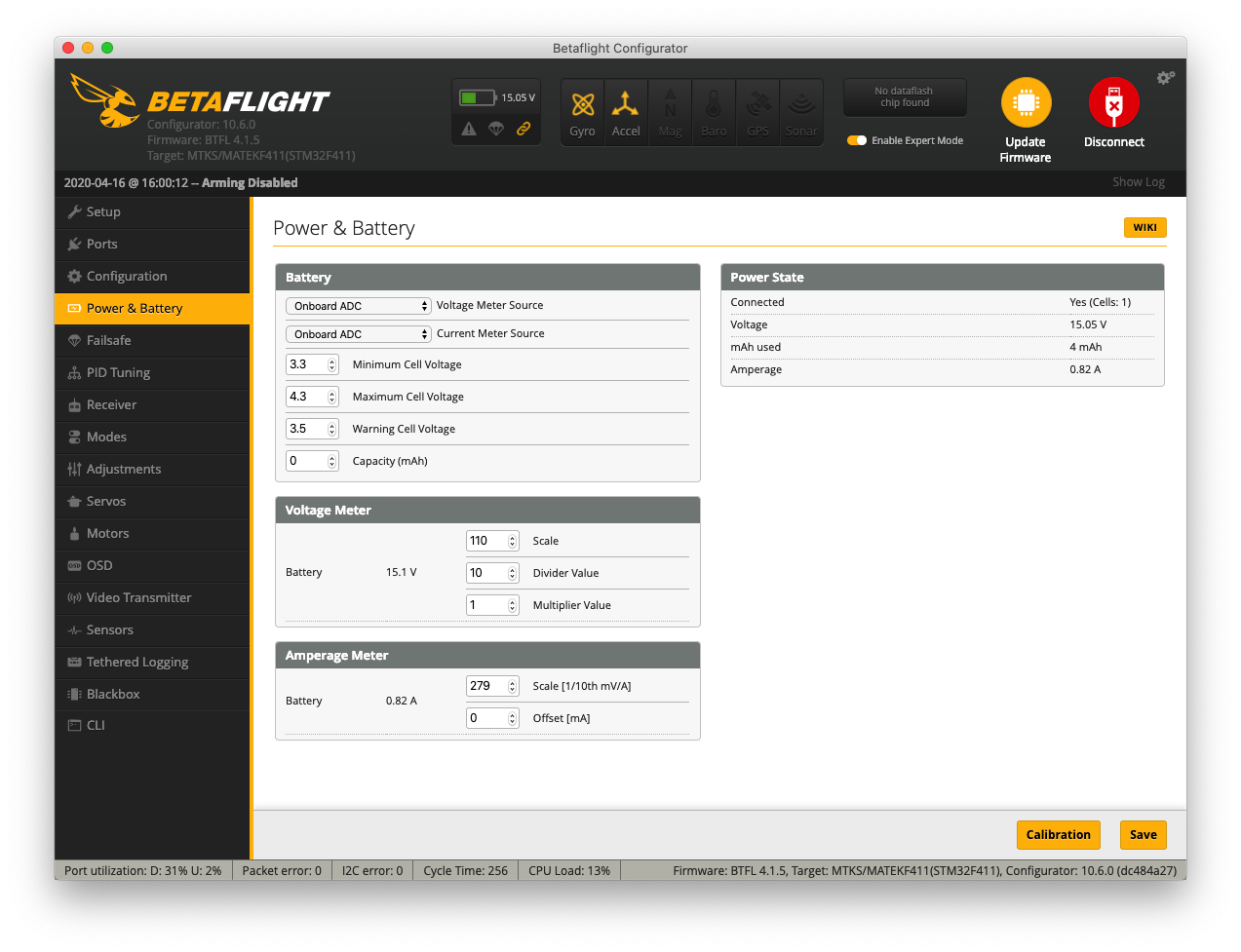
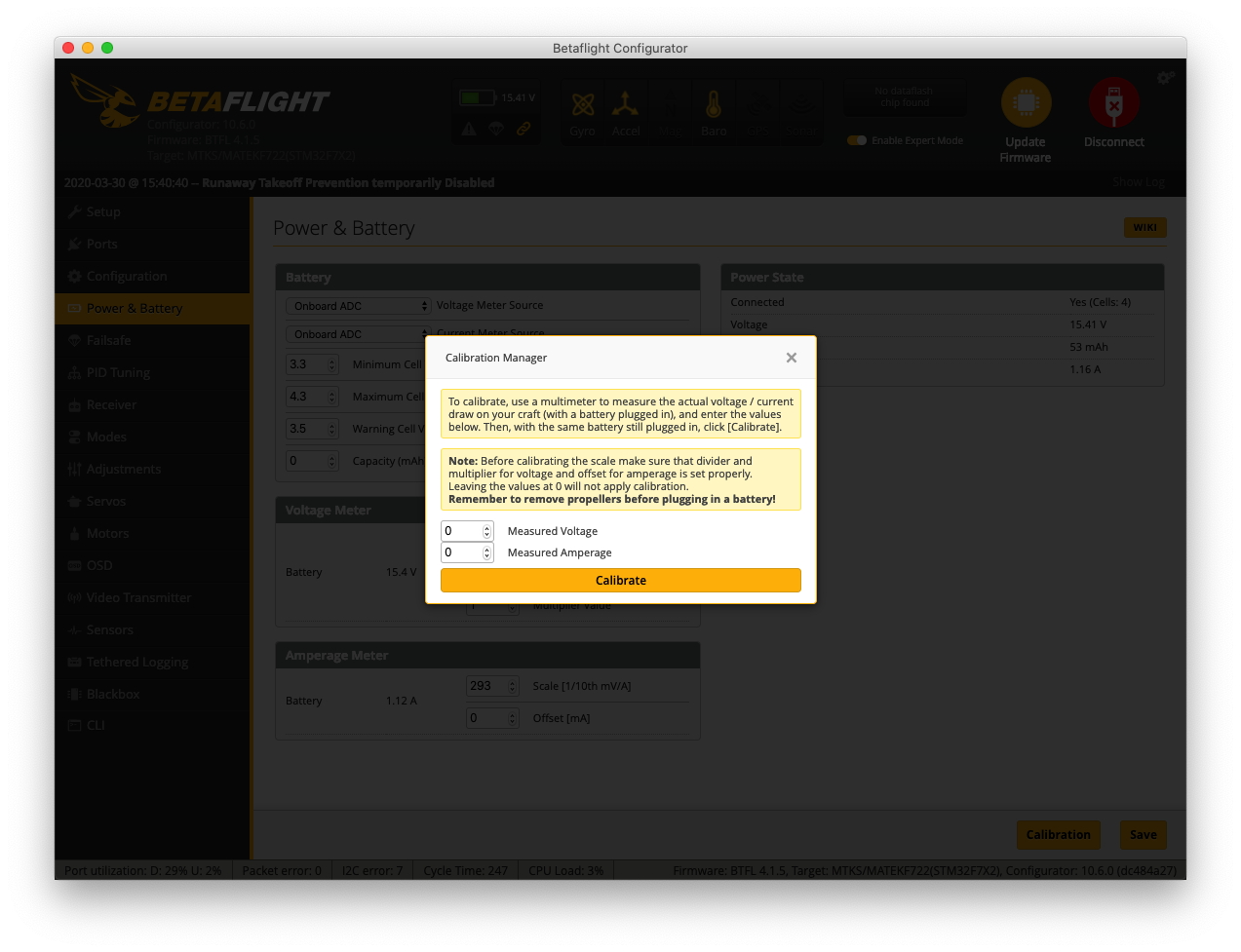
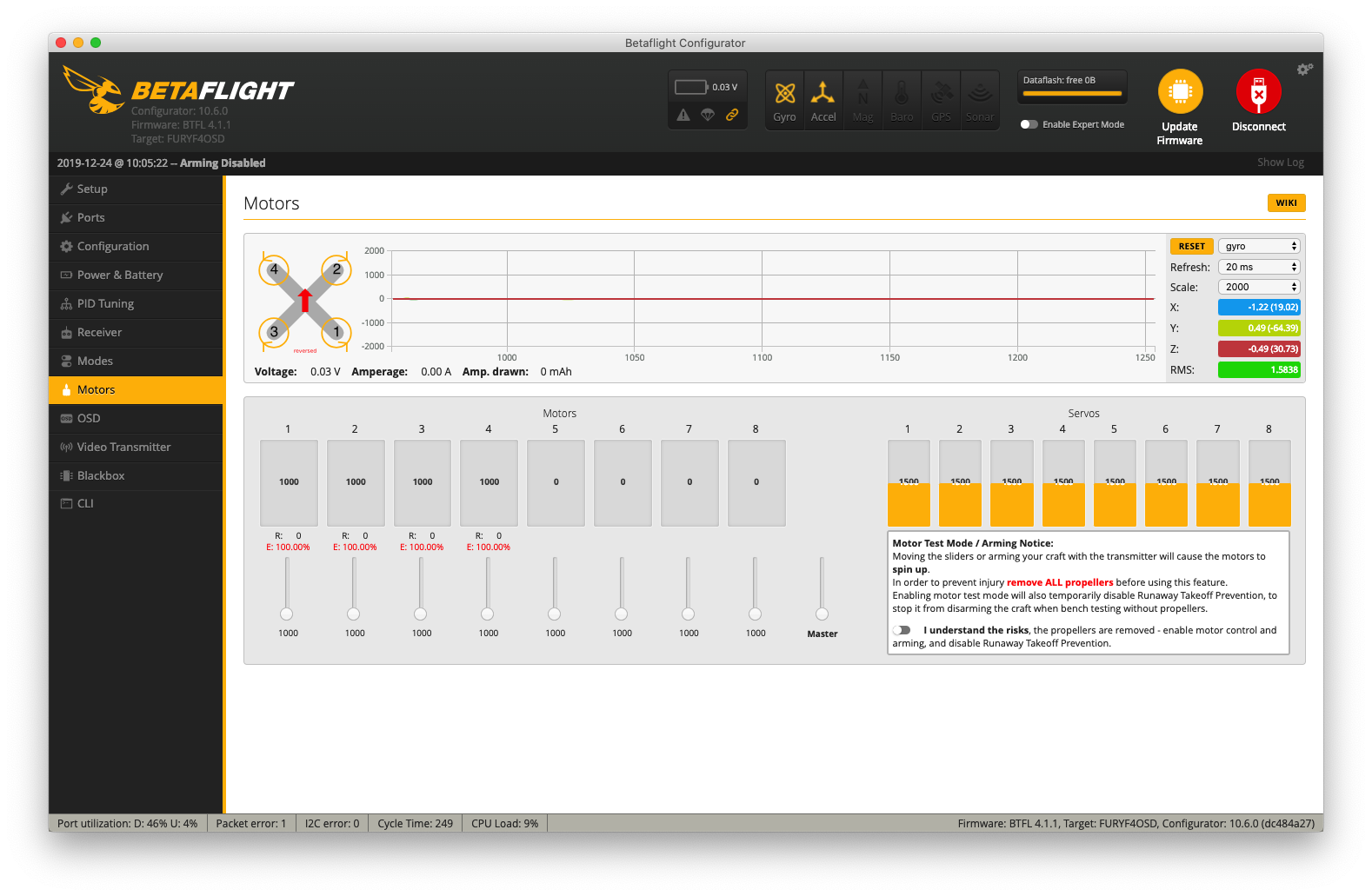
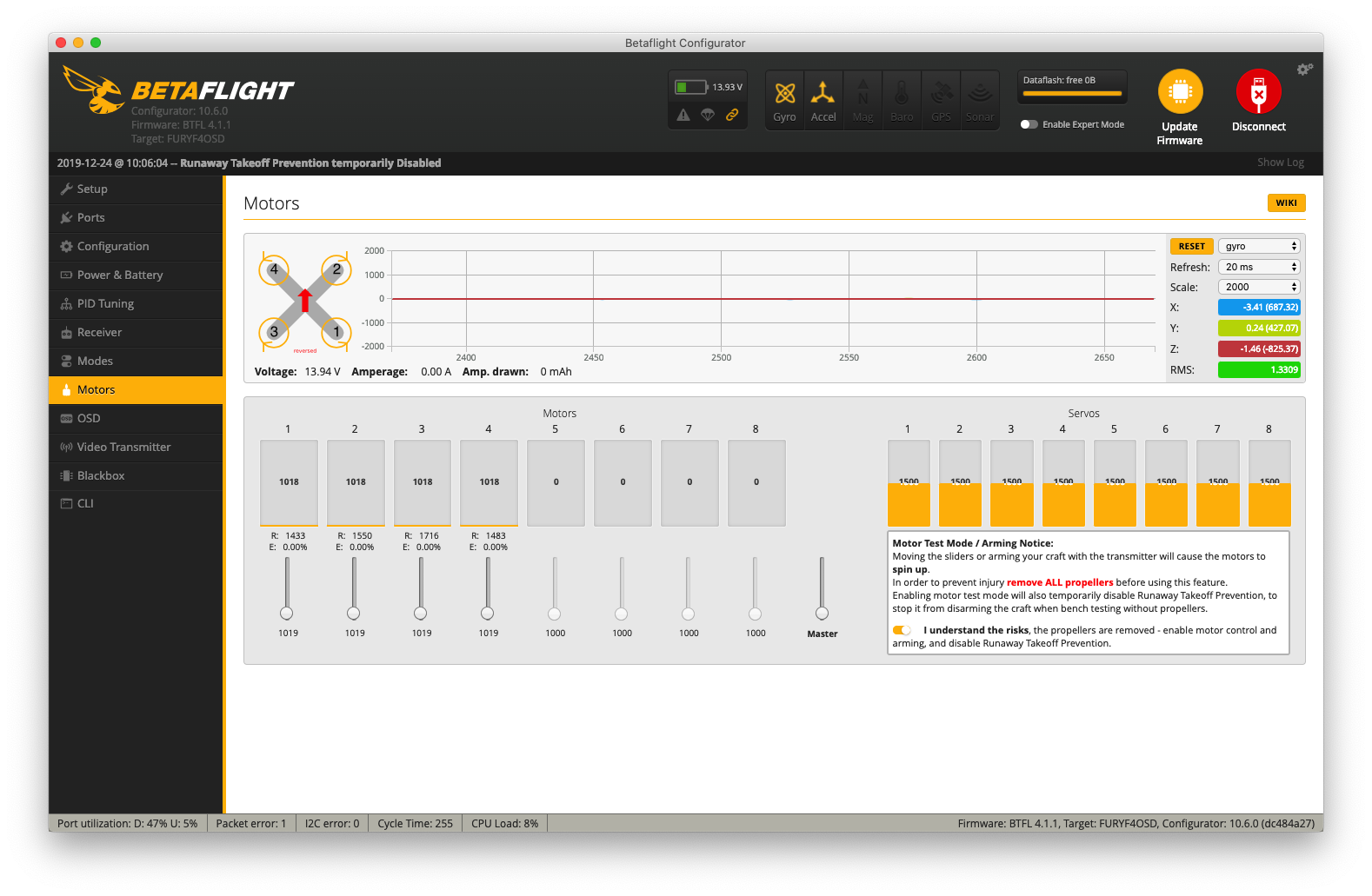
電圧は調整しなくても実用的な数値が出ていますが、電流の方はそうは行きません。OSDでBattery current mAh drawnなどを表示していても実際の電池容量に合ってないと感じる事ていませんか? FPV飛行の際には電圧だけみておけば問題はないのですが、せっかく電流も表示出来るのならばなるべく正確なものにしたいものです。Betaflight/Power & Batteryに入力する値をFC/ESCメーカーが提供している場合もありますが、それを入れておけば普通は大丈夫と思いますが、値がわからないこともありますし校正方法について考えてみました。
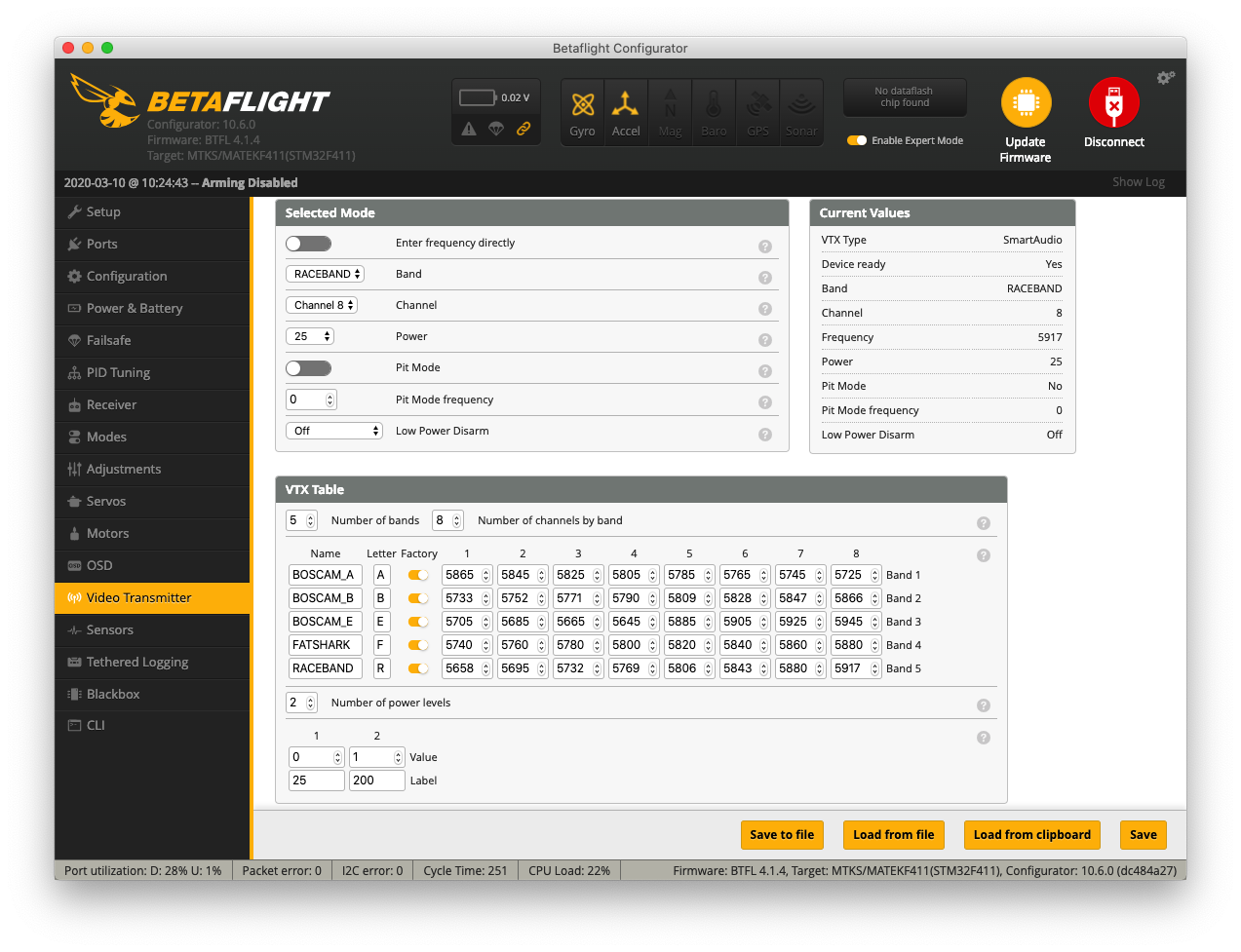
このガイドに10ラインほどのCLIへのコマンドが書かれているので、それをBetaflight ConfiguratorのCLIに投入すれば動くようになります。このコマンドセットは汎用になっているようでA01 VTXには存在しない500mW, 800mWも定義されています。そのままでも問題ない気はしますが、一応VTX Tableの画面で”Number of power levels”を”2″に変更して25mW, 200mWだけにしました。
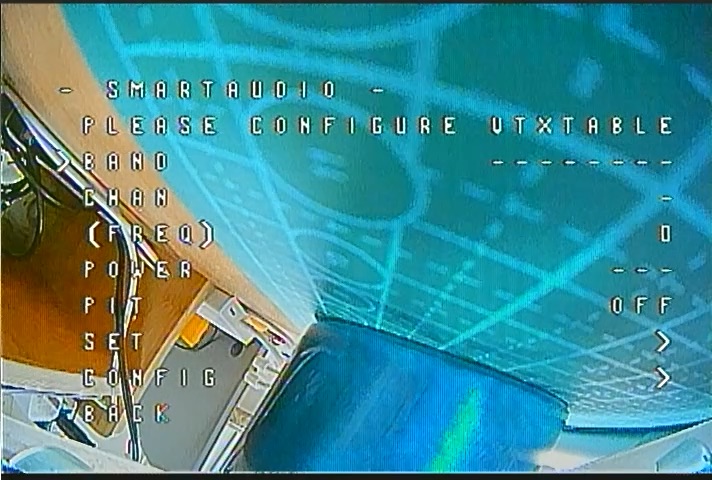
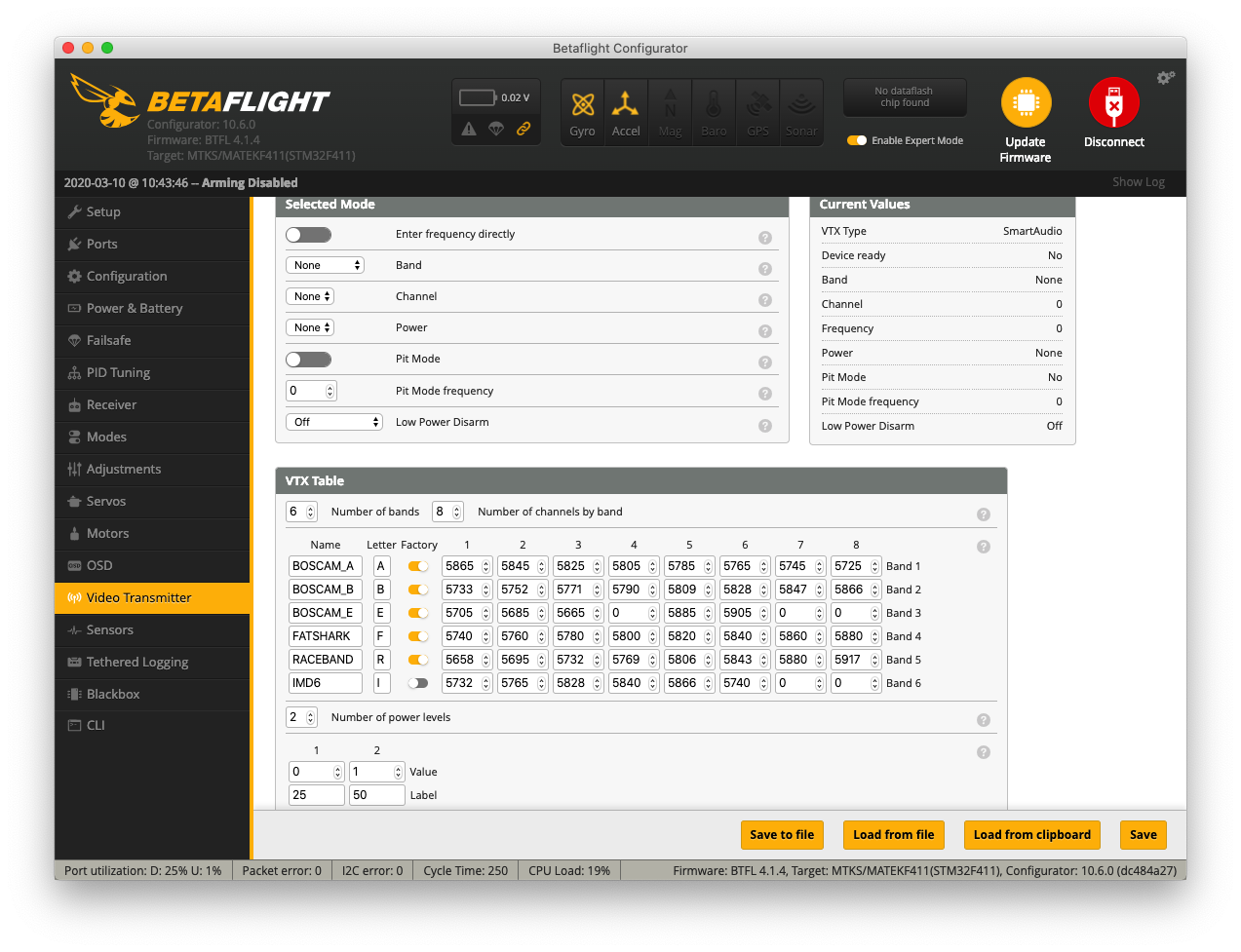
2) TBS UNIFY PRO NANO 5G8
こちらは製品ページに設定例が掲載されていません。そこでBetaflight公式のVTX Tablesのガイドに従います。このページのテーブルにjsonファイルのリンクがありますので適当なものを右クリックでjsonファイルとして保管します。TBS Unify Pro NanoはSmartAudion 2.0であると分かっていましたので”SmartAudio 2.0 (USA)”というのを使用しました。このファイルをBetaflight ConfiguratorのVideo TransmitterのページのLoad from fileボタンで読み込みます。ただし、このVTXの場合25mWと50mWの出力ですのでPower Levelsの部分は調整が必要です。調整後の画面は下の通りです。
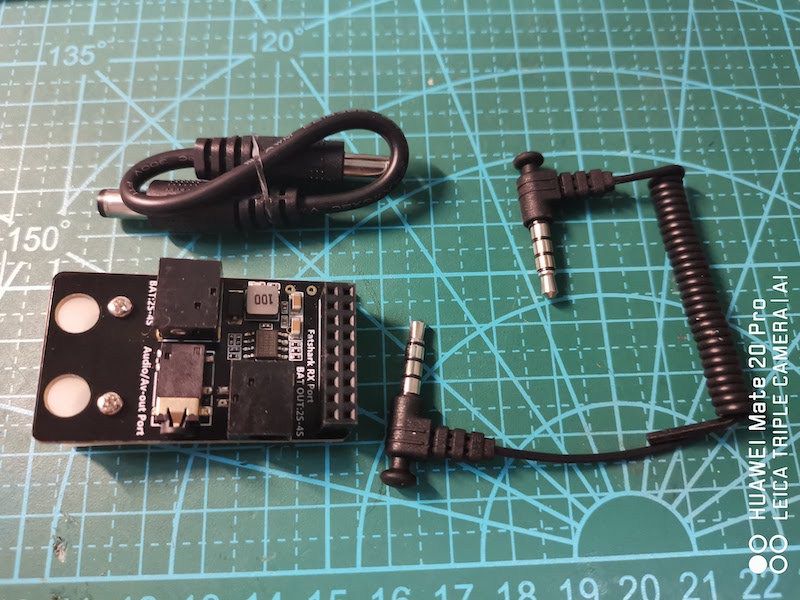
DJI Digital FPV Systemのファームウェア v01.00.02.00の目玉のひとつはAV-IN、アナログ入力の改善です。画像のレーテンシーが劇的に改善し、DVRでのアナログ映像の録画が可能になりました(しかもFatsharkより良い録画になるらしい)。もう完全に実用レベルと言えます。それに加えて本体の改造を行うことなく受信機の取り付けが可能な安価なアダプターも見つかりました。もうこれは試すしかありません。
DJI Digital FPV Systemで一番困っていたことは従来からのRC(送信機)を使用したときに電波の強さをあらわすRSSIが視覚的に確認できないことでした。これが最新ファームウェア(2019/12/02公開 v01.00.02.00)にて解決しました。もともと飛行中にゴーグルで視覚的に確認できる機体からの情報はバッテリー電圧くらいしかありませんでした。