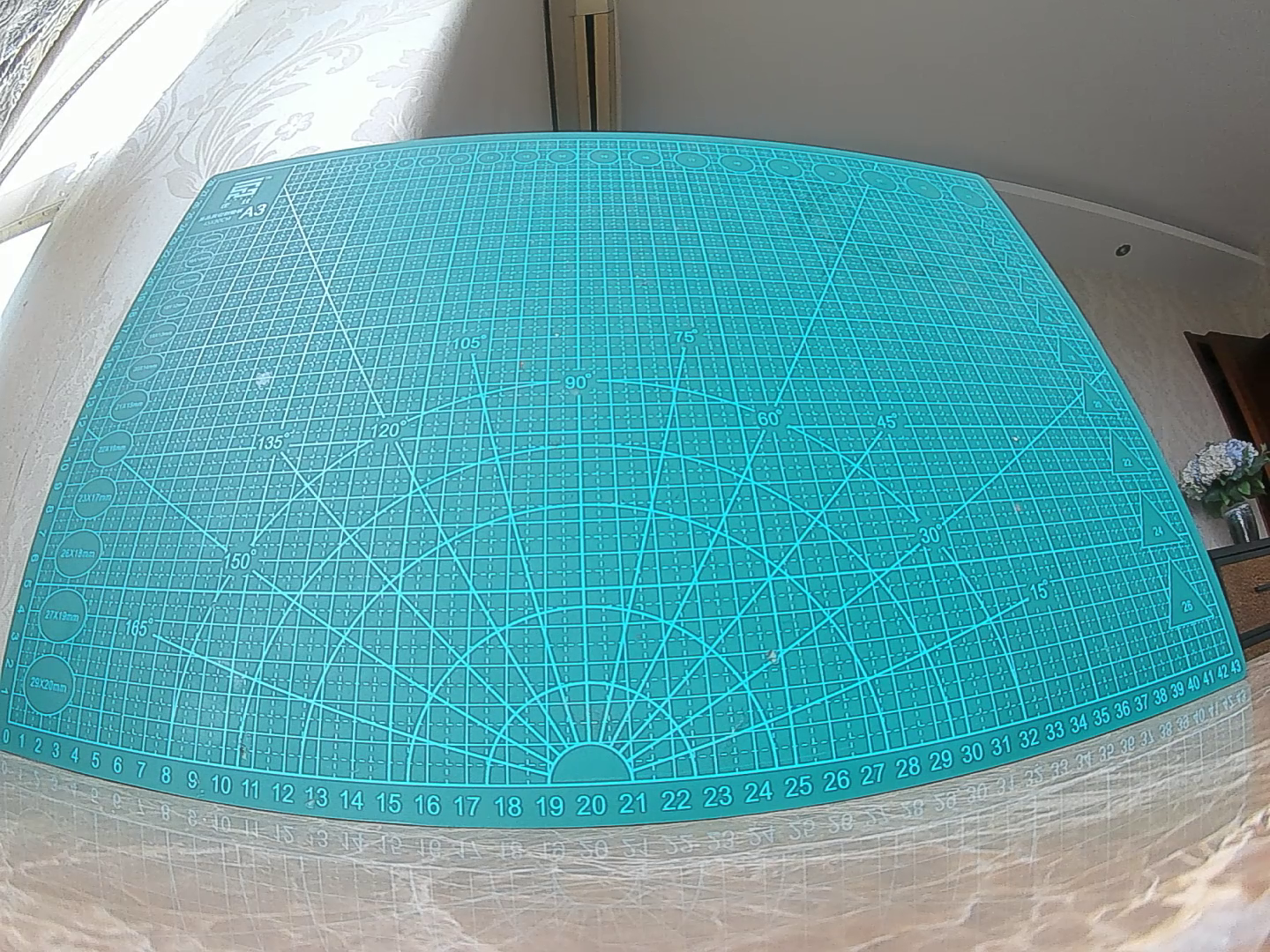
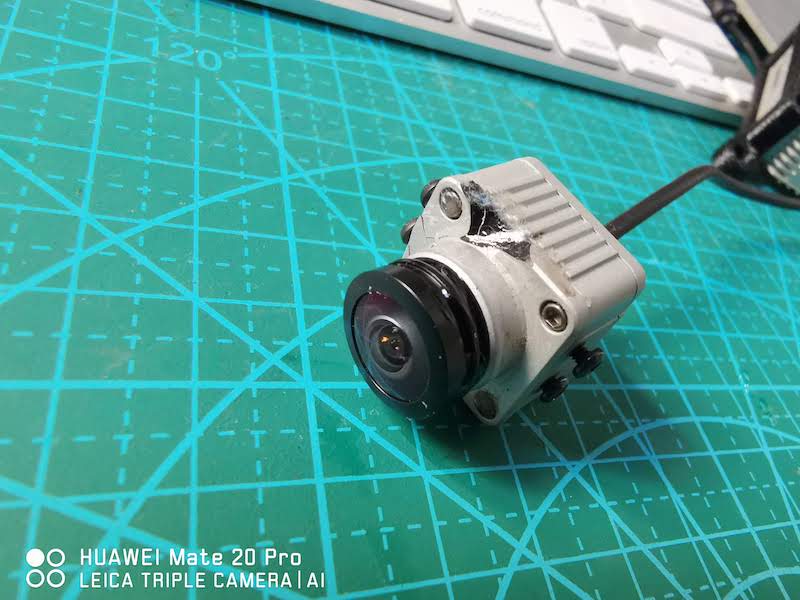
DJI Digital FPV Systemのカメラを壊しました。レンズだけではなくてカメラのケースも割れてしまったので、最初はDJIにカメラを発注しましたが、一週間たっても発送されません。そうこうするうちにFacebookのユーザーグループで交換レンズについての投稿がありました。わたしの破損したカメラも筐体が割れているもののセンサーなどは無事です。ということで割れた筐体は瞬間接着剤とUVレジンでなんとかして、レンズを交換することにしました。
レンズの形状は一般的なものなので、ねじ込み部分がM12であれば使用できます。ただしFOVや物理的な大きさはレンズによって違います。
DJI Digital FPV System
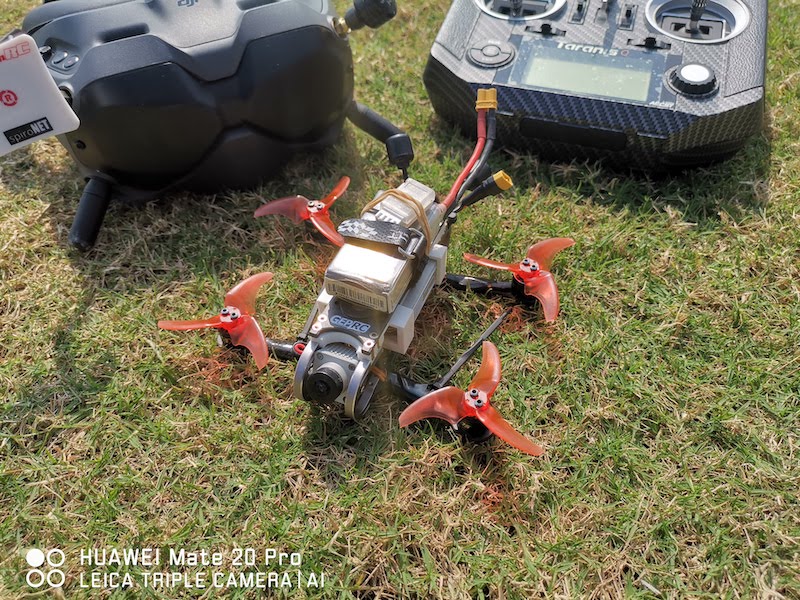
GEPRC Cygnet 3 frame mod
3D print data for DJI Air unit mount
iFlight Succe-X E Mini F4 35A Flight Stack
TBS Crossfire Nano RX
XING 1404 4600KV
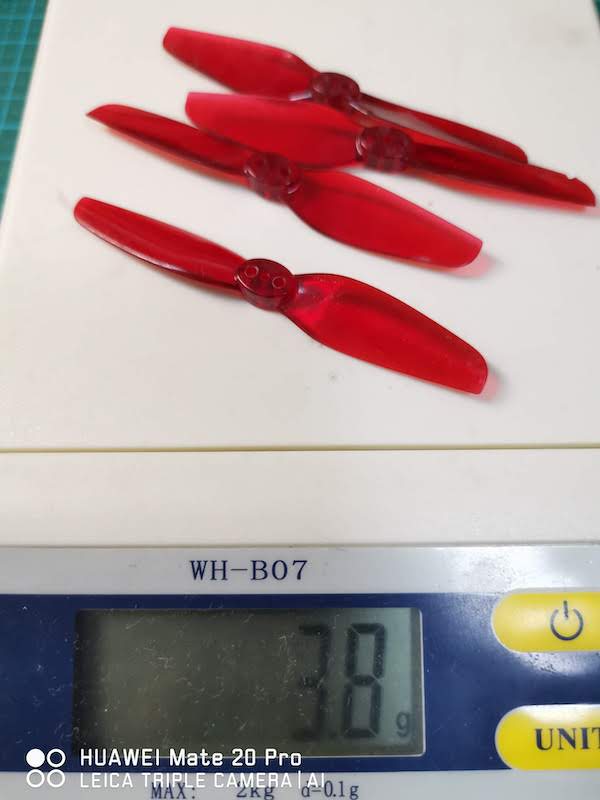
EMAX Avan Mini 3x2.4x3
Weight: 246g (including battery)
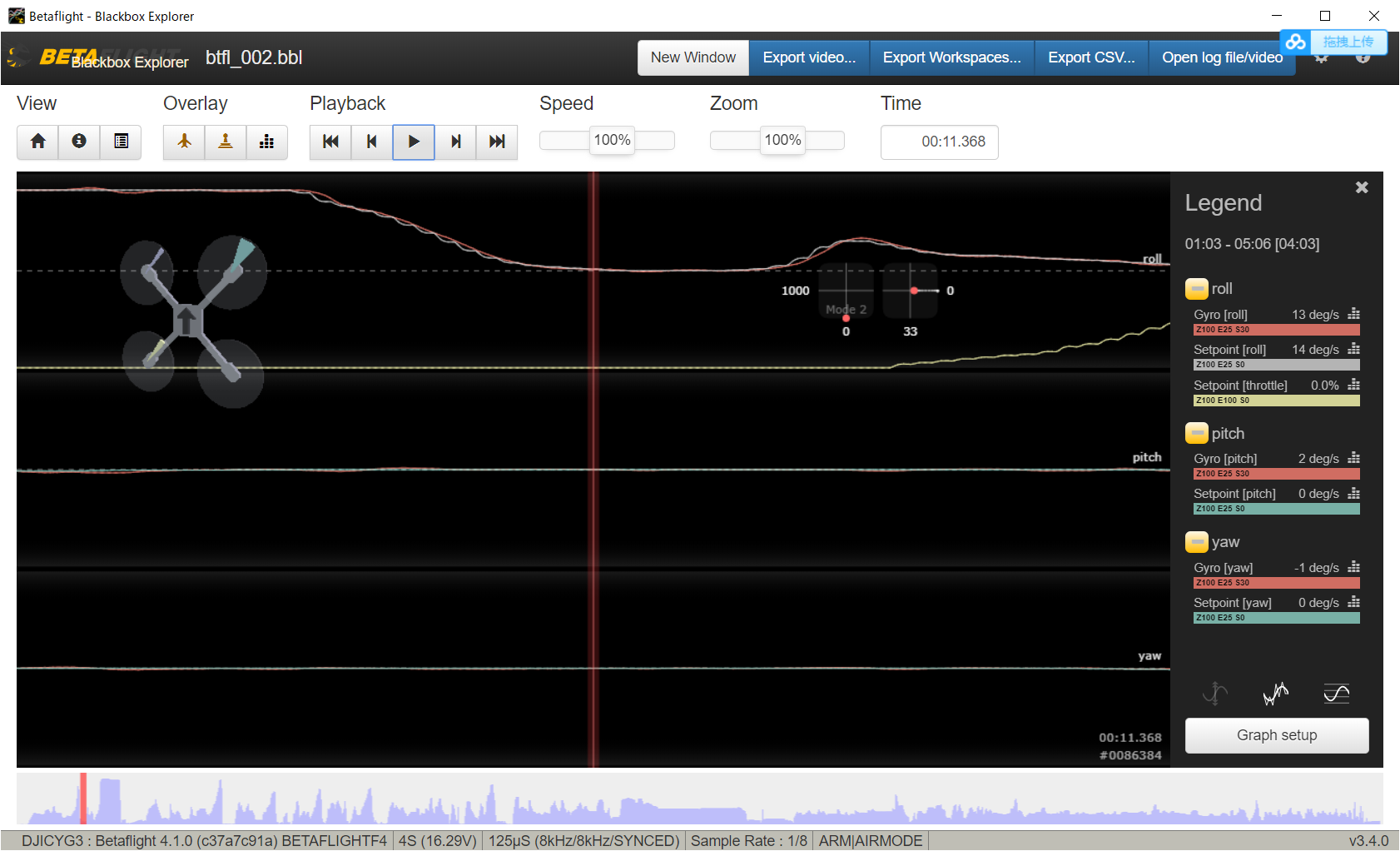
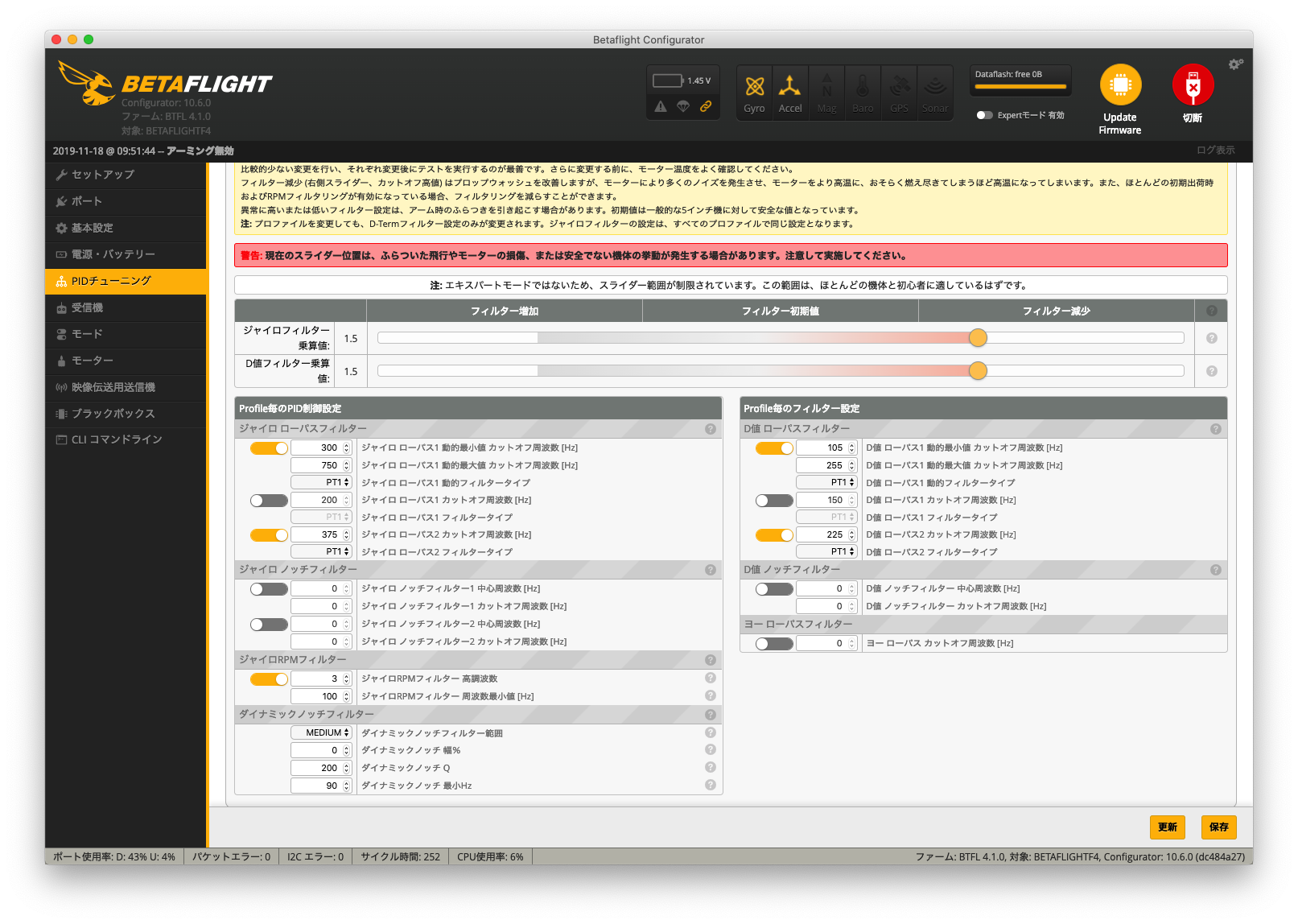
[ PIDの設定 ]
今回はプロップウォッシュへの対処ですのでPDバランスとPDゲインの2つのスライダーだけに注目します。それぞれ別々に強くしたり一緒に強くしたりしながら飛ばしてみました。
この試行錯誤はなかなか難しく時間がかかります。最終的にはP and D Gainのスライダーのみを1.5に強めることにしました。
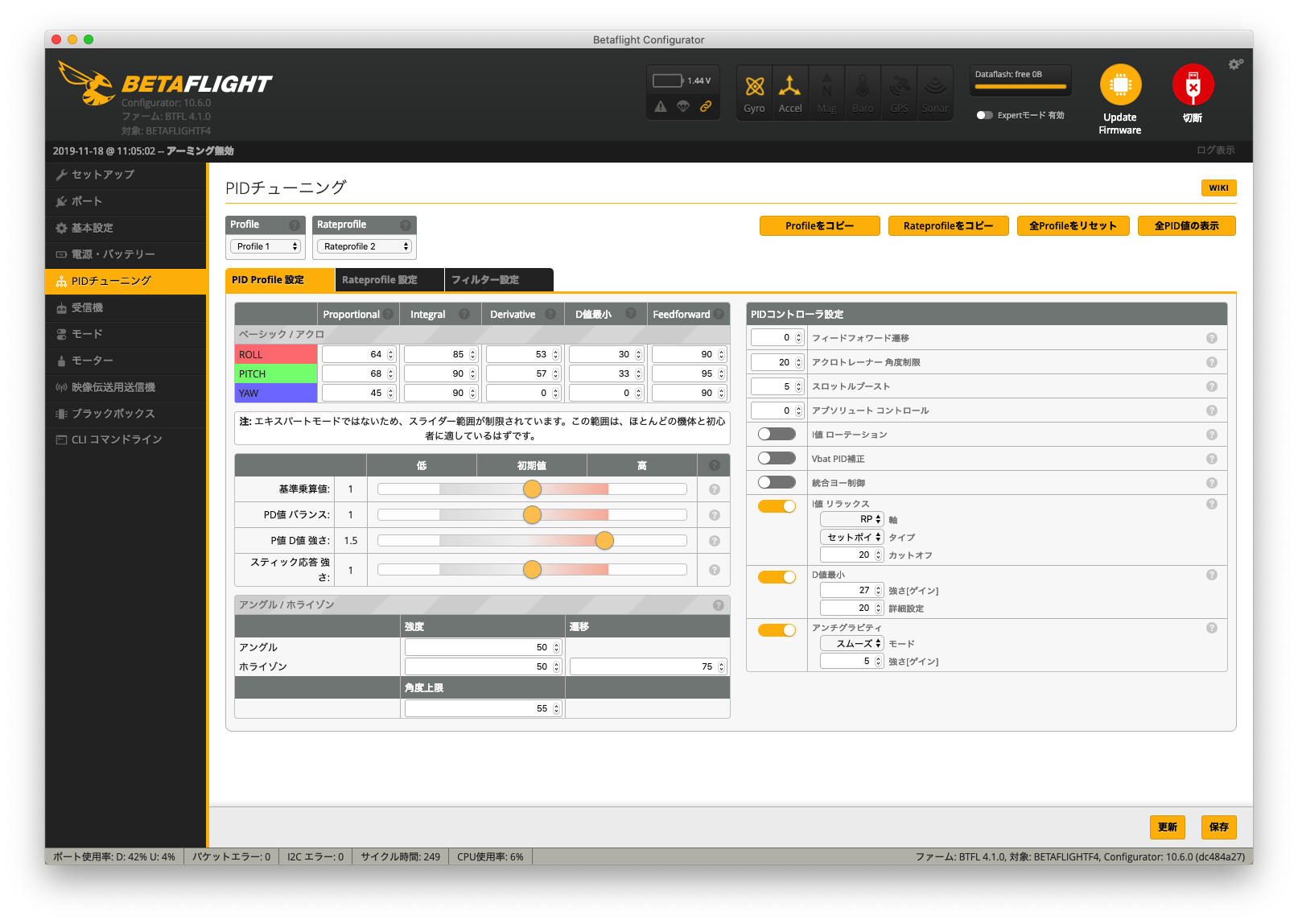
08:10 結局のところ次に試すことをお勧めするのがこのスライダー式構成です。その2つを既定値にしますそしてP and D gainで両方同時にを少し上げます。
-> ここからスライダーでのPID調整に入ります。この例ではPD BalanceとP and D Gainのを既定値に戻してから、それぞれ動かしています。実際のところ、飛行させながら様子をみたりBlackboxログを見て考えなればなりません。なかなか具体的に説明するのは難しいですが、以前のようにたくさんの数値を変更するよりはスライダーを動かす方が簡単だと思います。
09:33 その他の変更としては、わたしはこのD Min Advanceを0にD Min Gainを30にちょっと切り上げます。
-> これは、この人の設定例という理解で良いのか? 特に理由は述べられていないです。
09:47 このSetpointはBetaflightの既定値です。
-> I Term RelaxのType=Setpointは既定値で、かつレース向き、Type=GyroでCutoff=10がフリースタイル向きとおっしゃっています。
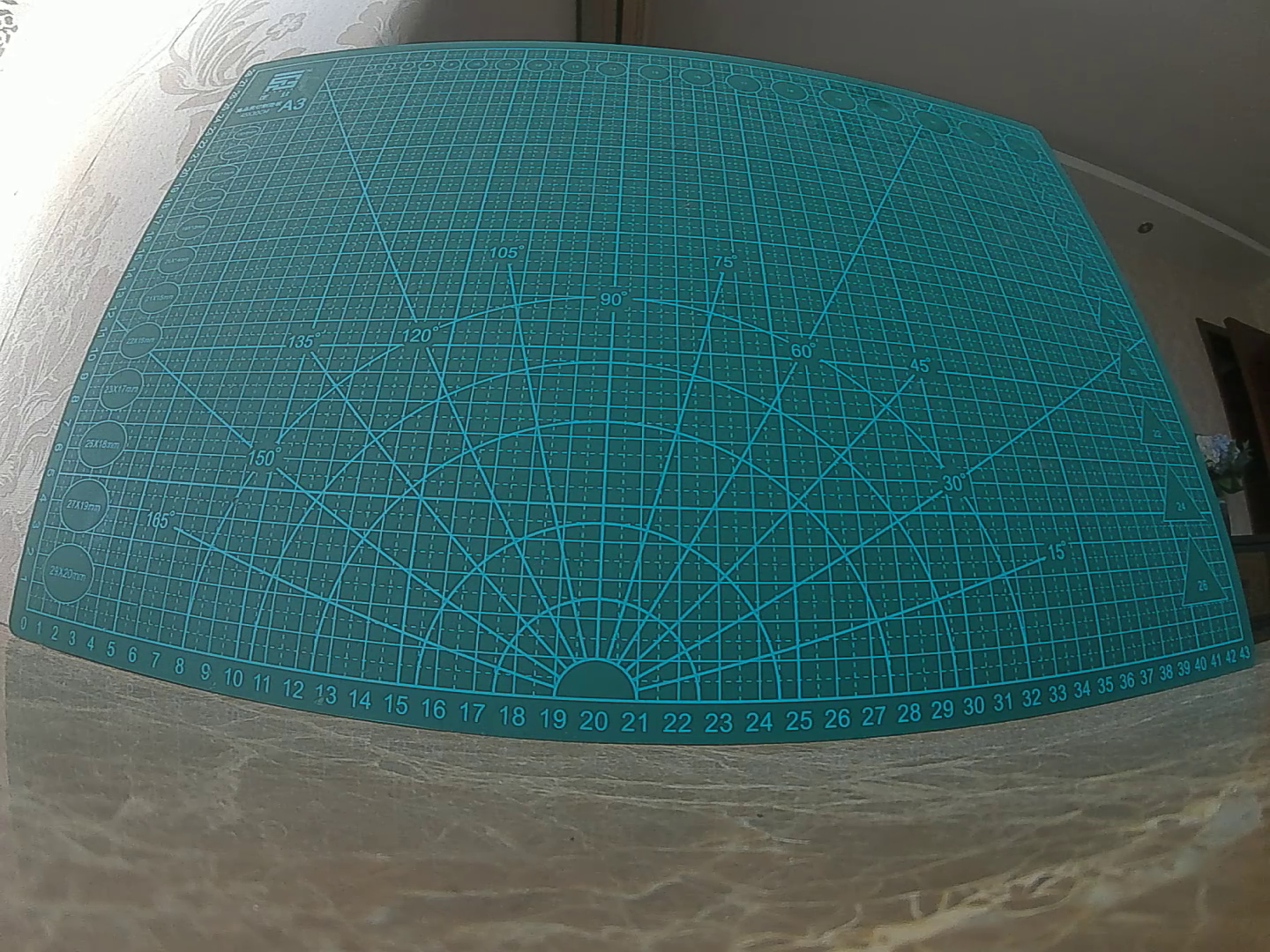
最近はFPVドローン(いわゆる、レースドローン)ばかりを飛ばしています。FPVドローンでは動画を撮影するわけですが、動画だけではなく切り出した写真を公開することもあります。模型飛行場で飛ばした動画をチェック中に、飛行場の全景を写真として切り出したいと思いました。飛ばしている時は、そんなことは考えていなかったので部分的なショットしか得られませんでした。そこで思い出したのがMicrosoft ICEというソフトウェアです。これを使うべく、材料として使用する写真を何枚か用意してICEを立ち上げてみると、New Panorama From Videoというボタンがあるではないですか。
ということで、切り出した写真を使うのをやめて、ビデオを読み込ませてパノラマ写真にしてみました。手順は簡単です。New Panorama From Videoで元となるビデオファイルを指定します。パノラマにする部分だけにトリムして読み込ませるといきなりパノラマ合成が出来ます。長いビデオを読ませると、パノラマ合成をする部分を手動で指定するための画面が表示されます。