一昨日「DJIの新しいFPVシステム!」を書いたばかりですが、早くも製品として発表されました。驚きました、ガチでFPVドローン向けの商品です。すでに有名FPVドローンパイロット、レビュアー達がYouTubeに動画を公開していますので実際の飛行テストや実装の詳細を知ることが出来ます。おすすめはRotor Riot, Drone Camp RC, StingersSwarm, ummagawdです。
更新) 実装方法の詳細がDrib 2で解説されています。
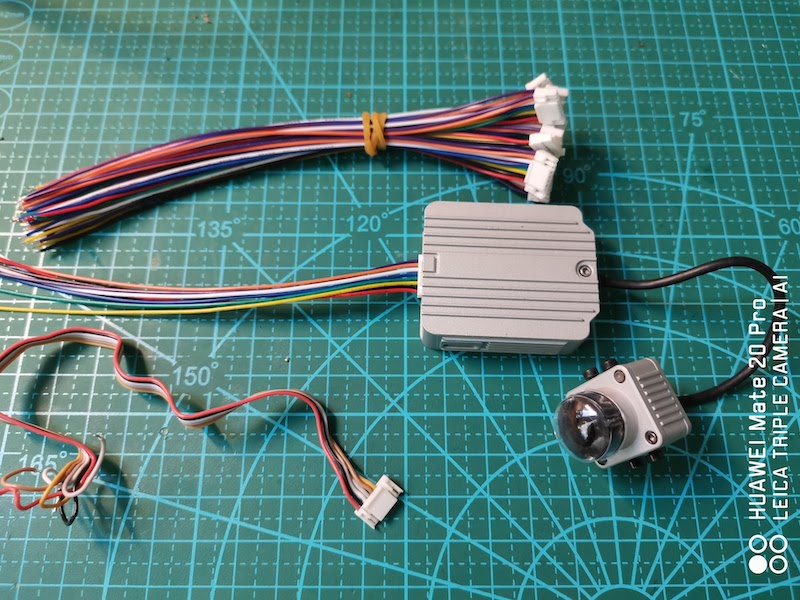
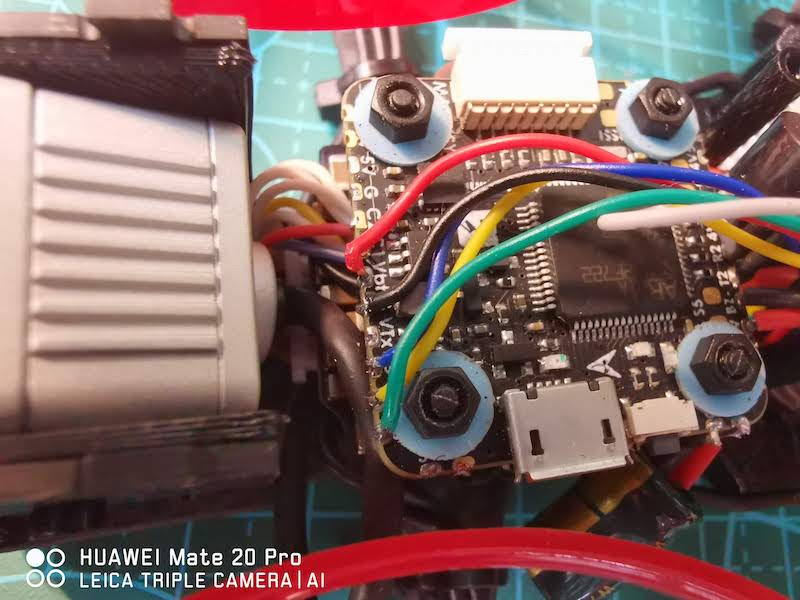
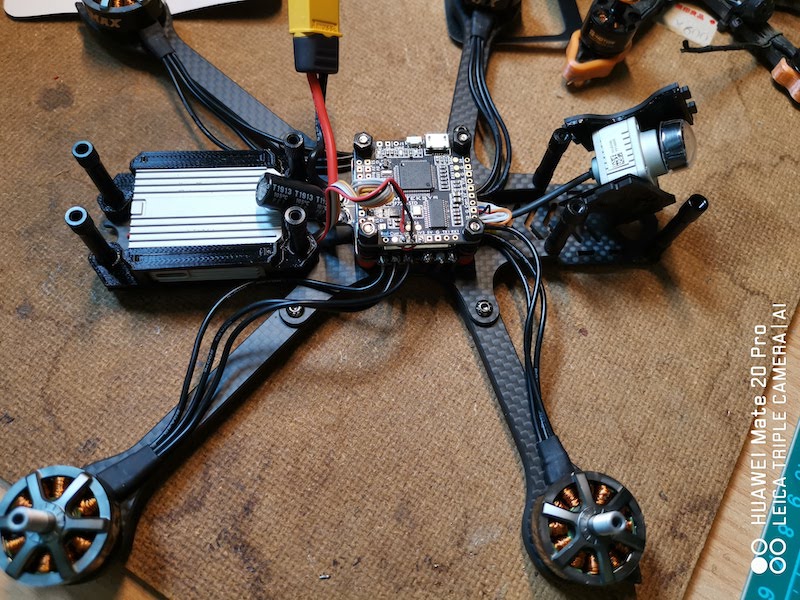
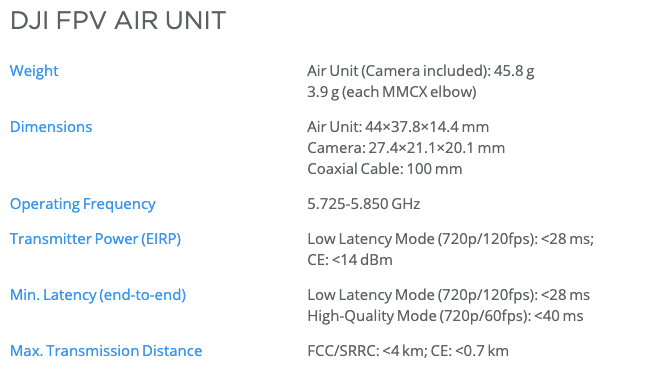
ドローンに搭載するAir Unit Moduleには画像転送と操縦のための受信機の両方が入っています。コントロール系統はFCにはSBUS受信機として接続します。加えてUARTも接続されてテレメトリーなどの情報交換も行うようです。受信機だけ従来のものを使用することも出来るようです。
更新) SBUSをサポートしていますが、Betaflight 4.1ではDJI専用のインターフェースが用意されるようです。ゴーグルも電波発信していてAir Unitと交信しています。UART接続はゴーグルでの操作に使われているもよう。
[ デジタル画像転送 ]
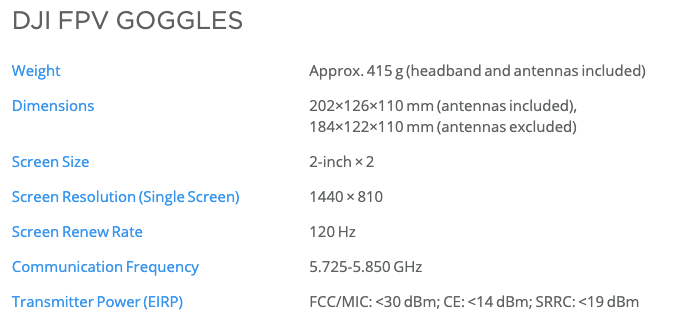
– 720P/120FPSのFPV画像、1080P/60FPSの録画
– FPVの画像遅延が28msと低遅延
– 8機同時飛行
– 4Kmのロングレンジ(映像、操縦系ともに)
– FCC認証
従来のFPVドローンの常識を覆すスペックです。FPVカメラの性能は徐々に上がっていますが、最終的にはアナログなNTSC/PALの領域から出ることが出来ていません。リアルに720Pの画像がゴーグルで見られるのは驚異的です。それが28msの低遅延で実現できているのが素晴らしいです。アナログシステムの遅延を凌駕しています。
アナログのFPVシステムでも各バンドに8チャネルの周波数が設定されていますが、すべてのチャネルを同時に使用することは不可能でした。一般的には3機、もしくは4機の同時飛行が安全範囲でした。DJIは8機同時飛行が出来ると言っています。
DJIのスペックで4Kmは実環境にそのまま適用出来るわけではありませんが、半分の2KmでもFPVドローンにとっては十分すぎる距離です。
従来のFPVシステムはアメリカにおいても全てのバンドを使用するにはアマチュア無線の資格が必要でした。 FCC IDがあるということはMavicなどのDJI空撮ドローンと同様にアマチュア無線の資格は必要ないと思います。これはとても大きなメリットです。
更新) 公式マニュアルによるとFCCの地域(アメリカ、もしかするとカナダもかな)においてCH1,2,6,7は周波数的にアマチュア無線のライセンスが必要だそうです。
[ OSD/テレメトリー ]
接続がSBUSとUARTだけなので、従来型のOSDは無いものと思います。UARTでBeatflightと相互に情報交換が出来るのでOSDに変わる情報表示がゴーグルでできるようになる気はします。Betaflightのテレメトリーは間違いなく得られているようで、すでにゴーグルを使用してPID値の変更などは可能になっているそうです。
[ 価格 ]
DJIの空撮ドローンは中国国内では戦略的価格になっていて他国よりだいぶ安価になっていますが、このFPVシステムでは、そういうことは無いみたいです。ということで中国での価格を紹介したいと思います。
– 画像転送キット 5699元
– フルキット 6499元
– ゴーグル単体 3999元
– エアユニット(カメラを含む) 1099元
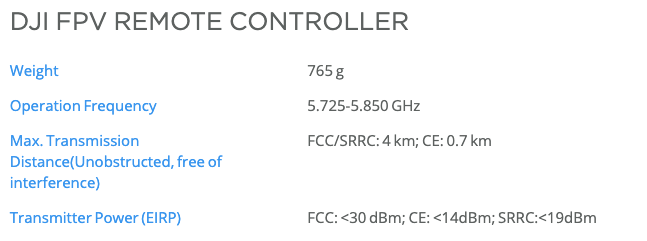
– コントローラー 1999元
– カメラ 349元
最初、高いと思いましたが、現行のFPVドローンで最高級デバイスを揃えた場合を考えると、まあまあ良い価格設定と思います。
[ 日本での発売 ]
今のところ、日本では発売されていないようです。DJIのスペックをみると5.8GHz帯しか記述がありません。日本ではWiFiも5GHzは屋外使用が出来ないことになっています。2.4GHz帯のサポートがないと技適の取得は難しいものと思います。もしかするとハードウェアは2.4GHzをサポートしていて、単純に技適の認可待ちなのかもしれません。
[ 現行VTX(画像送信機)との共存 ]
まずは使用している周波数についてまとめてみました。
| Band |
CH1 |
CH2 |
CH3 |
CH4 |
CH5 |
CH6 |
CH7 |
CH8 |
| A |
5865 |
5845 |
5825 |
5805 |
5785 |
5765 |
5745 |
5725 |
| B |
5733 |
5752 |
5771 |
5790 |
5809 |
5828 |
5847 |
5866 |
| E |
5705 |
5685 |
5665 |
5645 |
5885 |
5905 |
5925 |
5945 |
| Fatshark |
5740 |
5760 |
5780 |
5800 |
5820 |
5840 |
5860 |
5880 |
| Raceband |
5658 |
5695 |
5732 |
5769 |
5806 |
5843 |
5880 |
5917 |
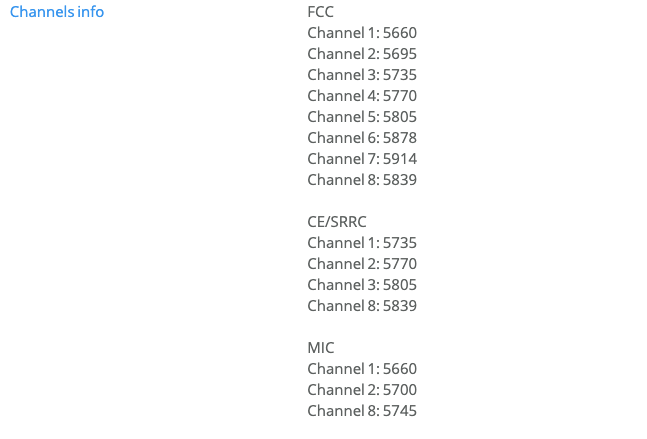
| DJI FPV System(FCC) |
5660 |
5695 |
5735 |
5770 |
5805 |
5878 |
5914 |
5839 |
| DJI FPV System(CE/SRRC) |
5735 |
5770 |
5805 |
– |
– |
– |
– |
5839 |
| DJI FPV System(MIC) |
5660 |
5700 |
– |
– |
– |
– |
– |
5745 |
全てのDJI Digital FPV Systemのチャネルは現行VTXと重なっています。注意深くチャネル管理をすれば、現行VTXシステムと同時に飛行することは可能と思います。実際に使用する人が出てくれば運用上のknow-howも蓄積されていくものと思います。
更新) DJIのチャネルでCH8だけ周波数の並びが違っています。これはCH8だけ特殊でPublic Channelと呼ばれます。電源オンの時に使用されたり、チャネルが重なったりしたときにも自動的に使用される可能性があるようです。アナログVTXと併用する場合にはこの周波数付近は避けるべきでしょう。
[ 展望 ]
現行FPVドローンのエコシステムを一気にひっくり返すということは無いものの、少なからぬ影響を与えると思います。DJI式のオールインワンだと生き残るメーカーが限られてしまうので、画像転送だけ独立したデジタル化が進むのかも知れません。そのためのカメラ、ゴーグル、VTXメーカー間で規格の統一が加速するかも知れません。とはいっても、タイニードローンに載せるほどの小型化が実現するにはかなりの時間がかかりますし、現行のVTXシステムもかなり長く生き残るとは思います。経済的余裕のあるマニアな人たちはデジタルとアナログの二本立てにならざるを得ないかもです。
[ 関連記事 ]
DJI FPV関連記事の新規リンクはやめてサプカテゴリーDJI Digital FPV Systemを作りました。
– DJI Digital FPV Systemのアンテナ変更
– DJI Digital FPV Systemの録画モード
– DJI FPV SystemのRC、送信機を使用した感想
– DJI Digital FPV Systemのケーブルの代替品
– DJI Digital FPV Systemの実装
– DJI Digital FPV SystemとAnalog VTXの干渉について
– DJI Digital FPV System実機での地域設定
– DJI Digital FPV Systemの地域毎の設定
– DJI Digital FPV Systemの日本での発売は近いのか?
– DJIの新しいFPVシステム!