更新) 8月1日にDJI Digital FPV System として発表されました。マジでFPVドローンのシステムでした。驚きました。
DJIが7月末に3個のFCC IDを取得した模様です。そのタイトルがDJI FPV Googles , DJI FPV Air Unit , DJI FPV Remote Controller と思わせぶりです。
DJIは随分前にFPVレースドローンの試作を行っていたようでもありますし、これらがFPVドローン関連製品である可能性はありますが、おそらくは現行製品であるDJI Goggles Racing Edition OcuSync Air Unitの延長線上の何かである可能性が高い気がします。ただしRemote Controllerが有るところが謎です。完成品のDJIドローンではない何かしらの操縦系のデバイスがあるようです。
FCC IDを取得していることからもFPVドローンで使用しているアナログなFPVではないことは確実です。つまりアマチュア無線として運用するものではなく製品を購入すれば誰でも使用できるタイプの製品で従来のDJIドローンと同様にWiFiの周波数帯を使用している模様。これでFPVドローンが飛ばせるくらい低遅延なものが出てきたら凄いのだけど。期待して良いのかな。
ゴーグルのFCC ID Labelの図面 を見ると、従来のDJIゴーグルみたいにボックスタイプではなくて眼鏡タイプのようにも思えます。SAR Report の29ページにもアンテナが4本付いたそれらしい図面があります。
どんなものが発表されるにせよ注目しておきたいです。
[ 関連記事 ] DJI Digital FPV System を作りました。
– DJI Digital FPV Systemのアンテナ変更 DJI Digital FPV Systemの録画モード DJI FPV SystemのRC、送信機を使用した感想 DJI Digital FPV Systemのケーブルの代替品 DJI Digital FPV Systemの実装 DJI Digital FPV SystemとAnalog VTXの干渉について DJI Digital FPV System実機での地域設定 DJI Digital FPV Systemの地域毎の設定 DJI Digital FPV Systemの日本での発売は近いのか? DJI Digital FPV System
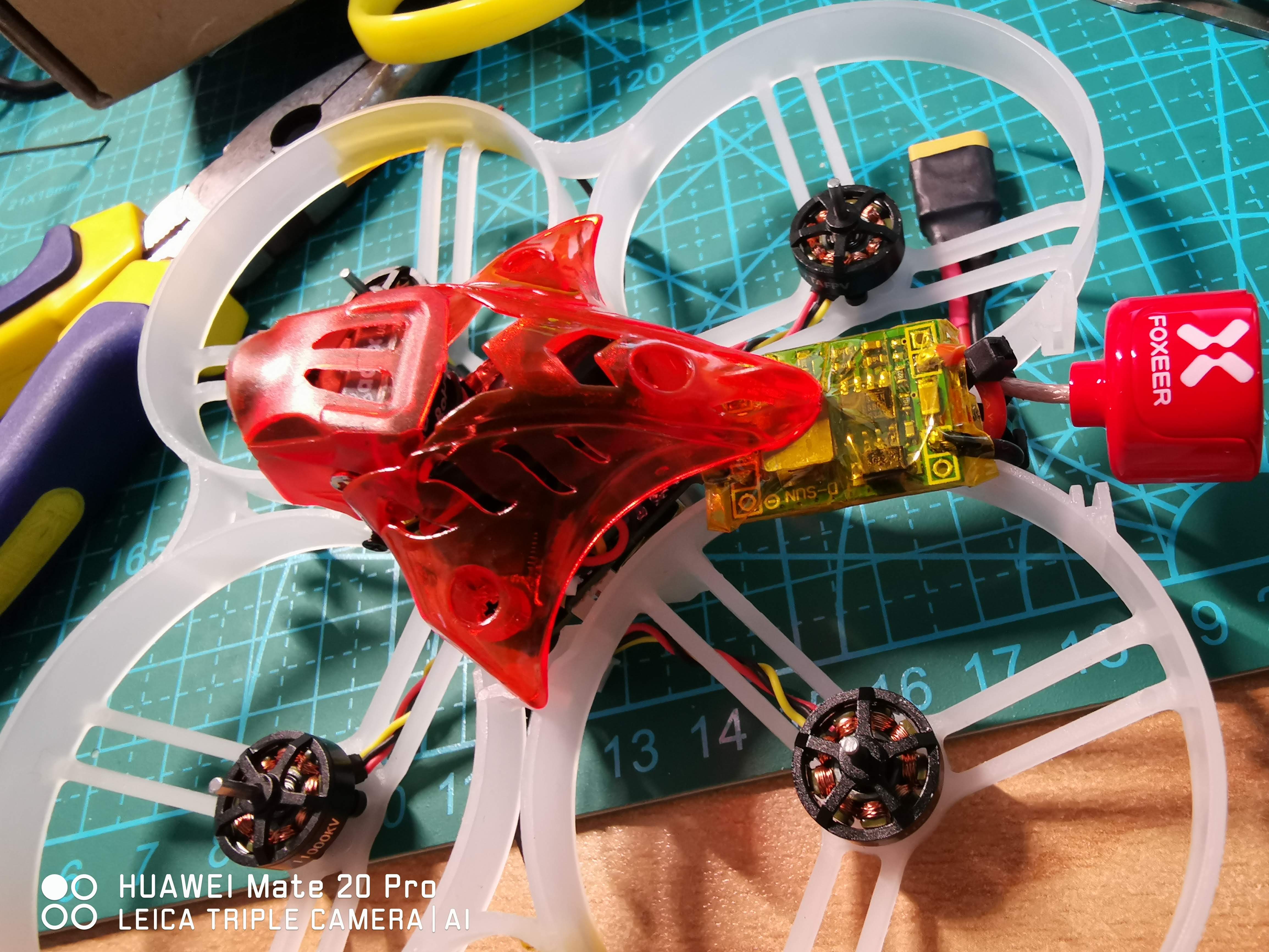
前回の飛行で折れてしまったフレームを交換するのと同時にキャノピーをHappymodel Trashcanのものに変更しました。これでカメラアングルを浅くできます。ただ見た目もSAILFLYというよりRedDevilになってしまいました。
カメラアングルを25度ほどにして試しにマンションの庭で飛ばしてみましたが、やはりパワーがありすぎて狭いところでまったりとは飛ばせません。
ということで公園で飛ばしました。
いきなりデスロールです。予備に買った赤いプロペラが外れやすいです。フロスという歯間ブラシをモーター軸とプロペラの間に挟み込む技を使っていても時々はずれます。ロックタイトというネジの緩み止めが有効かもしれませんが、現場に持っていくのはフロスの方が手軽です。
ゆっくり飛ばそうと思っていても、パワーウェイトレシオが高いためかすぐに速度が出てしまいます。それなりの広さがあれば、それも楽しいです。
あまり深く考えずにリラックスして飛ばすのが楽しいです。いろいろと技の練習することを考えて出かけたのですが、すっかり忘れて飛ばしていました。
VIDEO
快適に飛ばしていましたが最後にまたフレームを壊してしまいました。本格的に対策を考えねばなりません。
GoPro Hero5/6/7にはビデオファイルにメタデータとしてGyro/Accの値が記録されているそうです(Hero7ではGPSも)。そのデータを利用してソフトウェア的に動画の安定化を行うReelSteadyGoを試してみました。もとの動画は機体の調整不足と飛行技術の問題で安定したスムースな飛行が出来ていませんが、それを完全にソフトウェアの力でカバーできているのが下の動画で分かると思います。
VIDEO
一般的なソフトウェアによるスタビライザーは、画像そのものを解析して行うのでいろいろと限界もあります。特にFPVドローンのような激しい動きには適していません。以前DaVinci ResolveのスタビライザーでTinyWhoopがゆっくり飛ぶ動画を処理したことがありますが、それくらいが限界でダイナミックな飛び方をすると良い効果を得ることはできませんでした。
ReelSteadyGoはFPVドローンのかなり激しい動きでも問題なく追従します。しかしながら限界もあります。
[ クイックムーブ ]
[ ドローンに微細振動がある場合 ] 公式サイトにも関連情報 があります。
ReelSteadyGoは99ドルで販売されていますが、5ドル割引のクーポンが次の動画の説明にあります。わたしはすべてReelSteadyGoの自動処理だけを使用していますが、もう少し細かい設定についても語られていますので必見です。
VIDEO
Toothpickの標準機とも言えるSailfly Xですが、ひとつ残念なことはVTXの出力が25mWに限定されることです。一般的には25mWでほぼ問題はありませんが、林の中などでは途切れがちになるので状況によって出力が切り替えられる方が良いのは間違いありません。それならば最初からEachine Reddevilを購入しておけば良いという話でもあります。
本当はオリジナルのまま当分の間は飛ばすつもりでしたが、搭載されているVTX Camera AIOが不調になってしまったので予定を早めてVTXとカメラを換装しました。使用したのはHappymodelのWhoop VTXとCaddxのEOS2カメラです。
参考にさせてもらったのは東京バードさんのブログ記事 です。
わたしの場合は手持ちのWhoop VTXを使用したのでFCとの二階建てになりました。そのためM2の金属ネジを3本(20mmと25mm2本)と元々使用していたプラスチックネジを一本使用してFCとVTXを固定しました。
キャノピーが少し高い位置なりましたが飛行には影響はないと思います。重量は10gほど重くなりました。このサイズだと大きな差ですが、パワーの余裕があるので大丈夫だと思います。将来的には小さなVTXに変更して軽量化を図るかも知れません。この構成でのもうひとつの問題点はUSBコネクターへのアクセスが悪くなることです。現在はキャノピーを外してUSBを接続しています。
ついでにバッテリーホルダーを外してベルトでバッテリーを固定する方法に変更しました。
3Sバッテリーも何本か到着して、張り切って飛ばしてきました。カメラアングルにも慣れてきたところで木にぶつかってフレームがモーター取り付け部分で折れてしまいました。85mm whoopではよくこれくらいのぶつけ方していたのに、このフレーム弱いかも。以下、折れるまでの飛行です。
じっと静観していたtoothpickブームですがついに手を出してしまいました。色々な機種がありますが、手に入れやすいこともあり定番とも言えるHappymodel SAILFLY Xにしました。
まだまともに飛ばせていません。そういうことも含めての感想などを書いておきます。
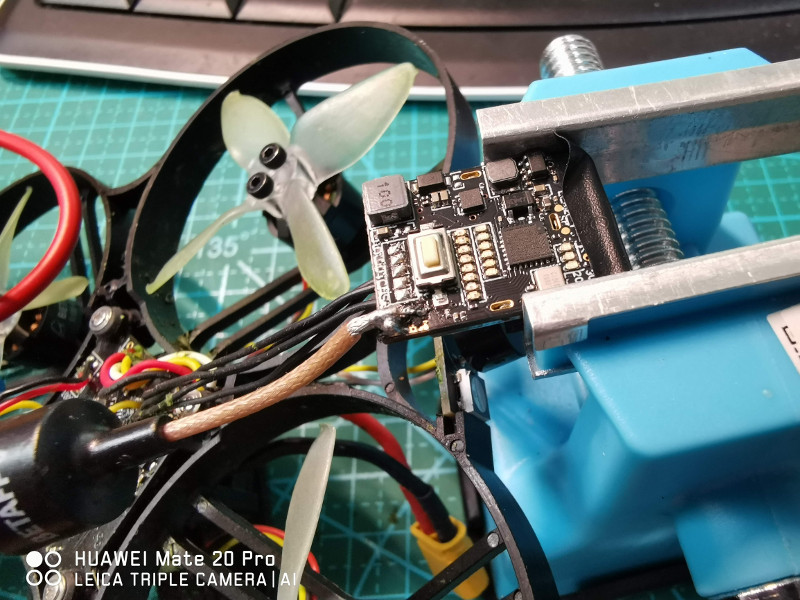
[ 受信機とブザーの組み込み ]
[ Betaflightの更新 ]
更新の前にCLIでdumpとdiff allを保管することに加えて、比較しやすいのでPower&Battery, PID Rates, Filterなどの画面はスクリーンショットも保管しておきます。
Betaflight 4.0.4を導入後、先に保管したDiff Allデータを入れますが元がRCにもなっていない開発版なのでエラーがいくつかでます。本来なら全て手作業で設定するべきかも知れませんが、この状態をもとに設定しました。
ボードの反転が反映されませんでした。set align_board_roll = 180
Power&Batteryで電圧関連が0になっているので、適当に設定します
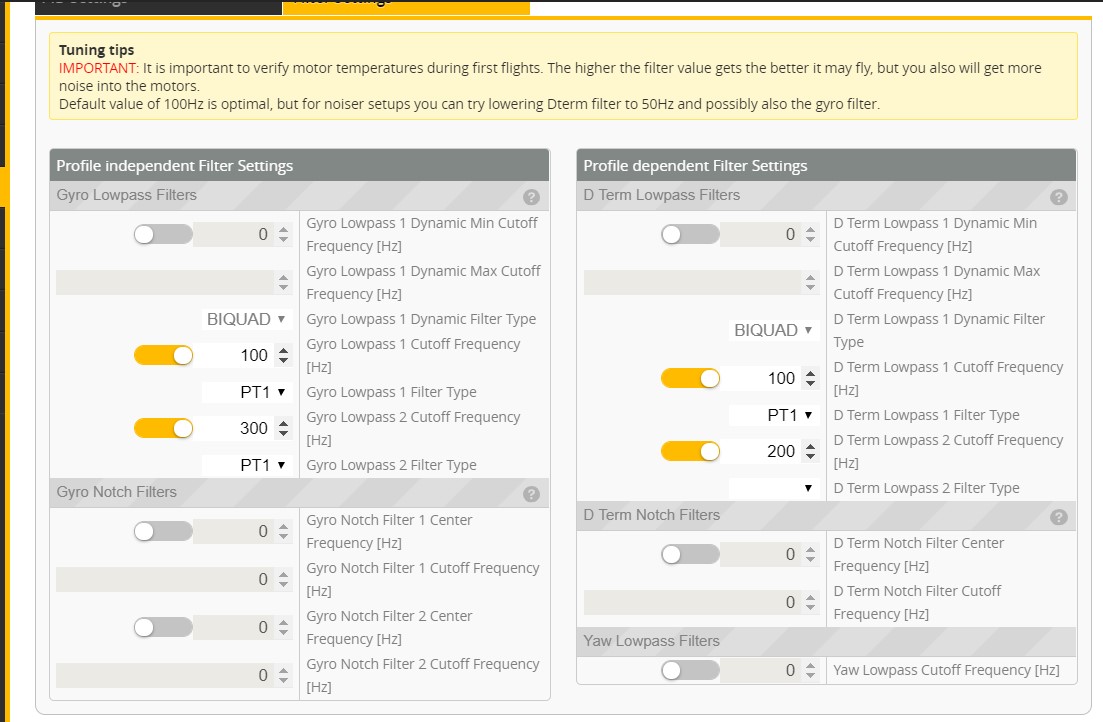
PID Tuningのフィルター設定が変わっています。そのままで良いのかも知れませんが、元の値にしておきました。
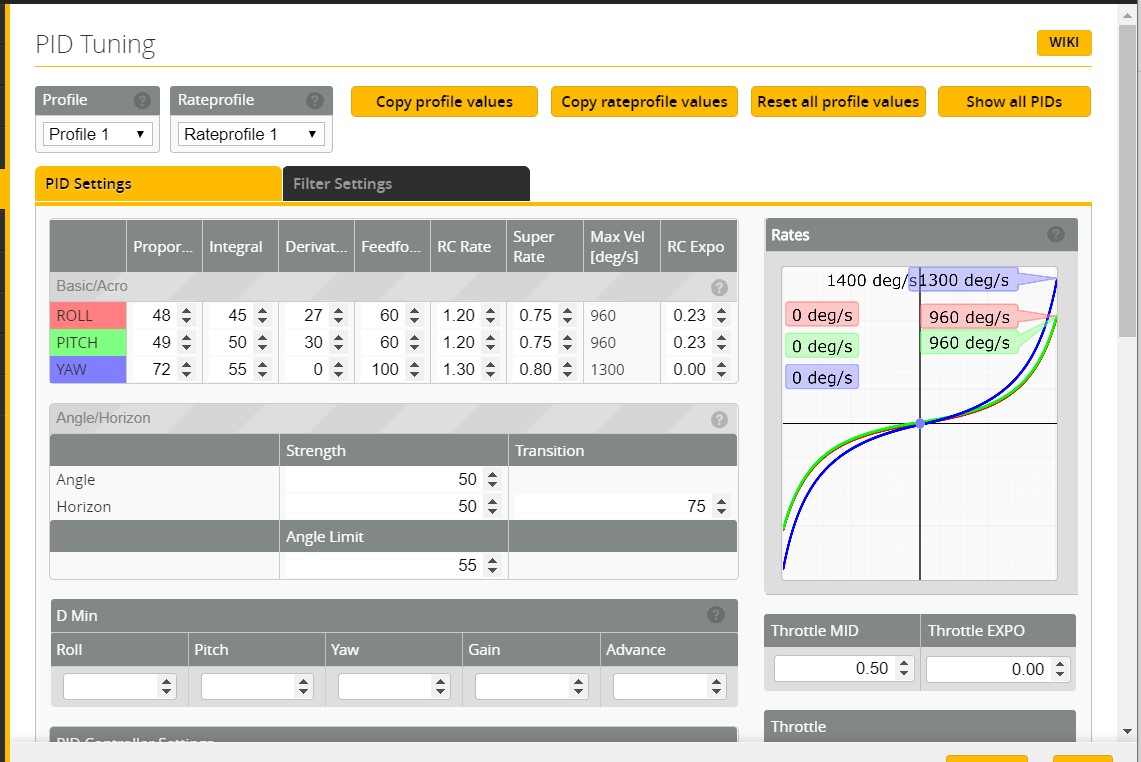
[ RATES ]
[ カメラアングル ]
そんなおっかなびっくりな飛行をインスタグラムで公開しています。
とりあえず2Sでも十分なパワーと運動性能があることは良くわかりました。その後3Sに変更してパンチ力のテスト中にプロペラがひとつ飛んでしまいデスロールに入りました。そのクラッシュのショックでVTXの電波が出なくなったためひとまずテスト終了です。もともと考えていたVTXの換装にせざるを得ない状態です。
小型でDVR搭載のドローン用カメラとして初めての4Kビデオが録画出来るCaddx Tarsierを試してみました。
細かいスペックなどは別のところに譲るとして使用感などを書いておきます。まずはトラブルから。
[ NO SDCARD ] We need to use our app to format the TF card “と書かれていました。
[ 録画が数秒で止まる ] FAQ に書いてあります。原因はボードとカメラを接続しているケーブルがボード側で接触不良を起こしていました。コネクターを押さえ続けれると録画出来ます。カメラ側はしっかりと押さえつけられていますが、ボード側は黒い接着剤が付いているものの押さえつけているものがあるわけではありません。
ケーブルは悪くは無いかもしれませんが、予備ケーブルが付属しているのでそれを使うことにしました。ついでにスポンジを張り付けてヒートシンクとの間でテンションが得られるようにしました。
使い勝手は悪くはありません。FPV用とHD録画用のカメラは完全に独立しているのが特徴でもあり面倒なところでもありますが、FPVは一度設定してしまえば触らないですし、割り切ってしまえば問題なしです。Runcam Split mini2やCaddx Turtle V2ではFPV画像が薄い感じがして今ひとつ飛ばしやすくはないのですがTarsierは流石に独立したFPVカメラなので飛ばしやすいです。
残念なのは録画中かどうかがFPVの画面には表示されないことです。ボード上のLEDで確認する必要があります。(追記)
ボードにUART端子があるので接続しRuncam Split Mini2と同様の設定をして録画の開始、停止が出来るか試してみましたが駄目でした。
VIDEO
とり急ぎ飛ばしてみた動画です。ND8フィルターを装着していますが、一説によると晴れていてもNDフィルター無しで良いとの話しもありますので、おいおい検証してみます。また、今回は4K30FPSだけで撮影しましたが、他の解像度との比較もしてみたいです。\
何分にも小さなカメラなので画質はGoProやMavic Pro2とは比較にはなりません。本当に4Kが必要なのか考える必要があるかも。
Betaflightの設定に関して語るのは、いまひとつ気が引けますが私の設定例で活用出来そうなところをかいつまんで公開します。基本的な設定方法については一切触れておりません。
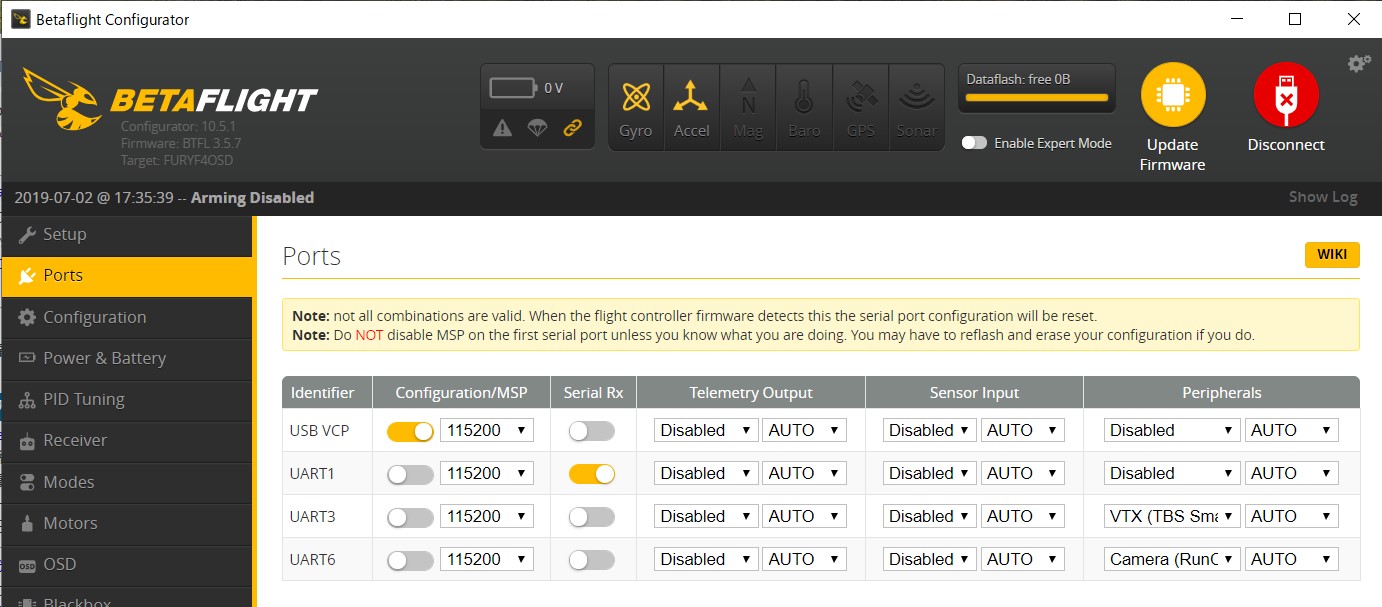
Ports
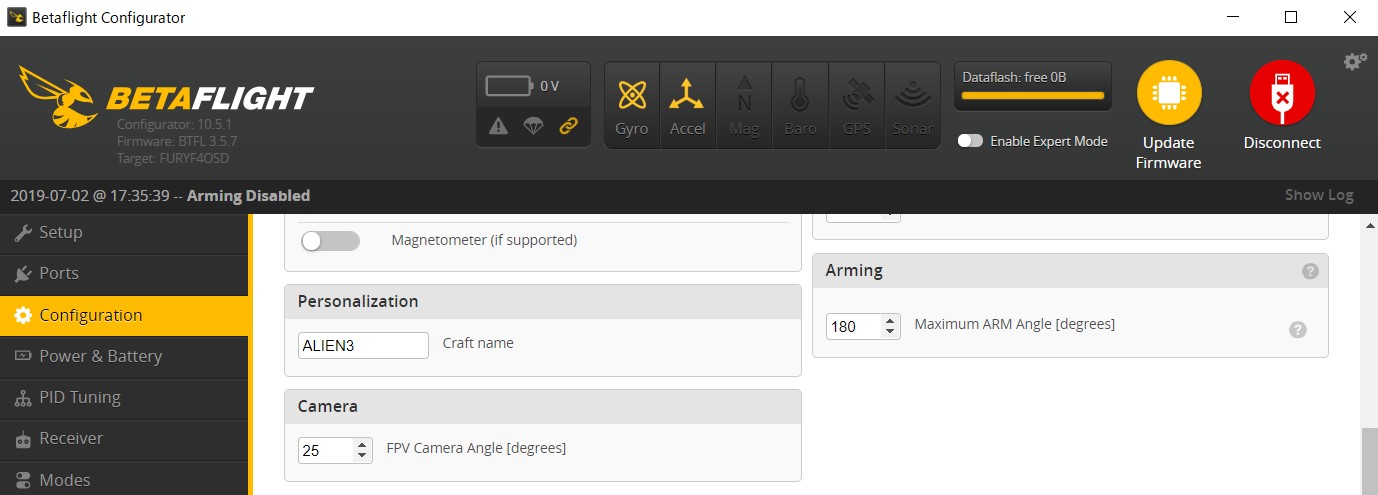
Configuration
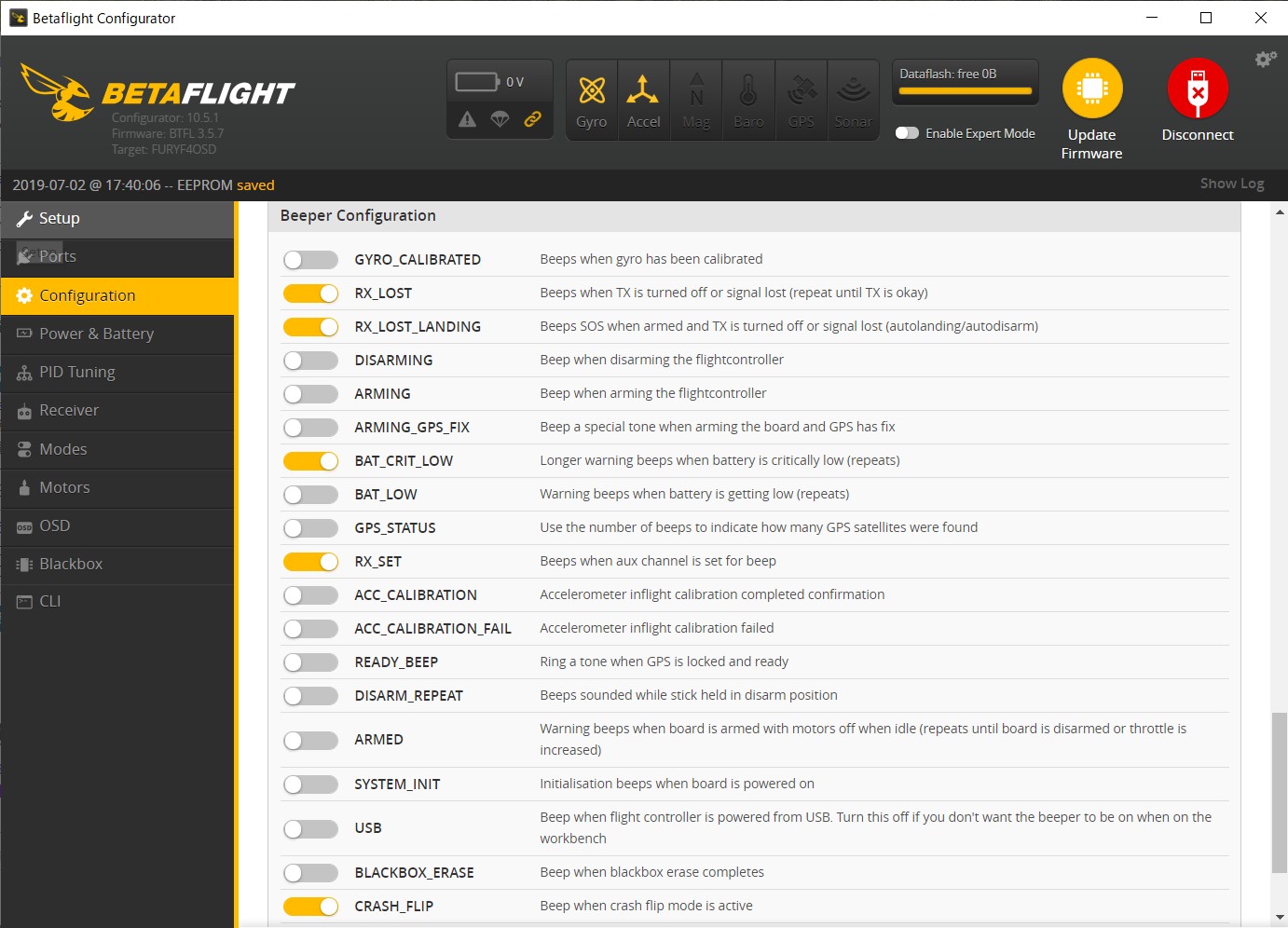
Beep
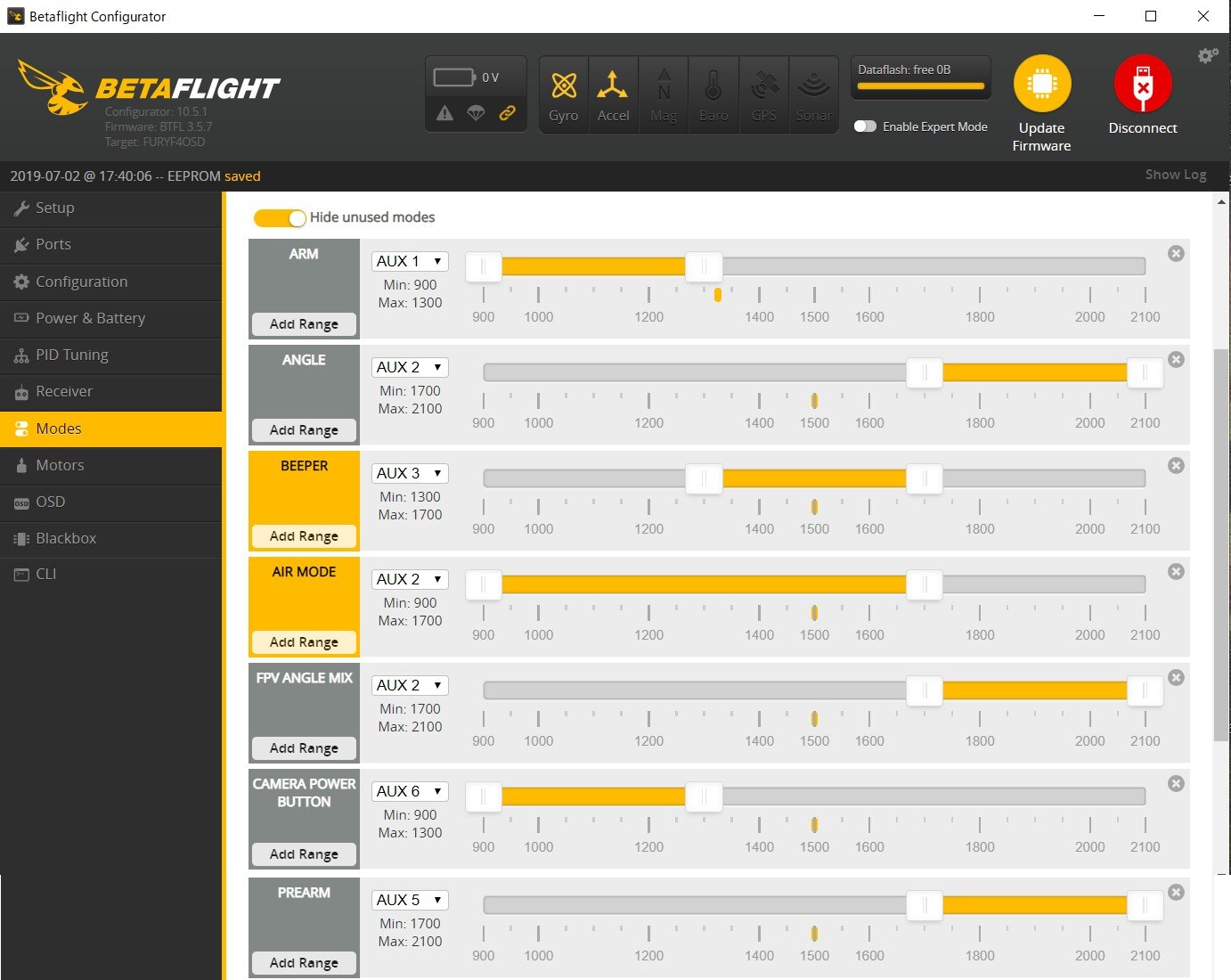
Modes
[ PREARM ]
[ AIRMODE ]
[ ブザー ]
[ VTX関連 ] 最近のVTXだとSmartaudioで送信機からチャネルや出力を制御するのが一般的です。わたしは加えてCLIコマンドでset vtx_low_power_disarm = onを設定てしています。これは例えばVTX出力を500mwに設定しておいてもアームしていない時は最低の25mwにするためのものです。これでVTXが焼けるのを少しでも防ぐことが出来ます。
[ Runcam Split Mini2制御 ]
BetaFPV Beta85X用のフレームを利用したブラシレス機にハマっています。そのために幾つかのFC (Flight Controller)試してきましたので、それらについてつらつらと書いていきます。
BetaFPV F4 Brushless Flight Controller and ESC
Crazybee F4 Pro V1.0
キャノピーの後ろに載っているのがあと付けの5Vレギュレーター
Crazybee F4 Pro V2.0
最近流行りのSailfly-XにはCrazybee F4 Pro V2.1 が搭載されています。VTXもコネクター接続になっていたりとV2.0からかなり変わっているようです。気になっていますが未入手です。
HBS-F405 2S
GEPRC GEP-12A F4 Flight Controller 12A ESC BetaFPVのサイト に詳細が書かれています。それによると4S用のモーターは1105 5000KVとなっています。モーターも4Sバッテリーも入手済みですが、まだテスト出来ていません。
発売当初に問題になっていたESCが発火する問題が解決されたバージョンのBeta85Xを入手しました。
最近、Taranis Q X7SにCrossfire Micro TXみを搭載したのでCrossfire受信機搭載のものにしました。ただし85X HDでロングレンジを狙うつもりはありません。
最低限のBetaflightの設定で普通に飛びましたが色々と問題も発生。
[ VTXの電波が弱い ]
[ 電圧の異常 ]
[ プロップウオッシュ ]
[ Fly away ]
=> その後、送信機のスロットルに不具合が見つかりました。おそらく原因は送信機側にあったものと思われます。
– Betaflight 更新 –
色々と問題もあるのでBetaflight 3.5.0から4.0.0に更新しました。PID値は3.5.0のメーカー設定のものを使用して、“4.0 Tuning Notes” の“I’ve already got a perfect tune on 3.5, I just want it to fly the same” の設定を行いしまた。ただし文章中に書いてあるI値を小さくするのを忘れたまま飛ばしていましたが、かなり調子よいです。この設定をベースに微調整していく予定です。
BetaFPVのBeta85X用のフレームに既存の75mm 2SブラシレスのFCとモーターを移植して飛ばすのがとても楽しいです。適当に普通に飛びそうな2S機であれば、そのまま85mmフレームに載せて2インチプロペラに付け替えるだけで、パワフルで優雅な飛行を楽しめます。75mm機で気になっていたプロップウオッシュとそれに伴う予測不能な挙動もほとんどなくなります。
この構成はShutterBug85 とも呼ばれています。私自身もMr ShutterBugのこのYouTubeビデオを見て作ることにしました。
常にメインテナンスと飛行の繰り返しなので仕様は変わっていきますが、今までに作った二機の仕様を紹介します。
[ 一号機 ]
[ 二号機 ]