特別新しいことをやろうとしているわけではありません。タイニーをLEDで飾る延長線上、かつ古くからあるBetaflightのLEDコントロールを絡めた話です。
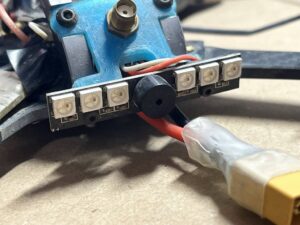
写真は今は飛ばなくなった古い5インチ機です。以前はよくこんな風なLEDとブザーが同時に取り付けられるボードを買っていました。多分、最後に使ったのはBetaFPV 75Xあたりでしょうか。このLEDはBetaflight ConfiguratorのLEDストリップタブで設定して光らせます。当時は確かアームしたら色を変えるみたいなことをしていましたが、ゴーグルをかけている本人にはわからないので、単純なテールランプ的な意味合いしかありませんでした。
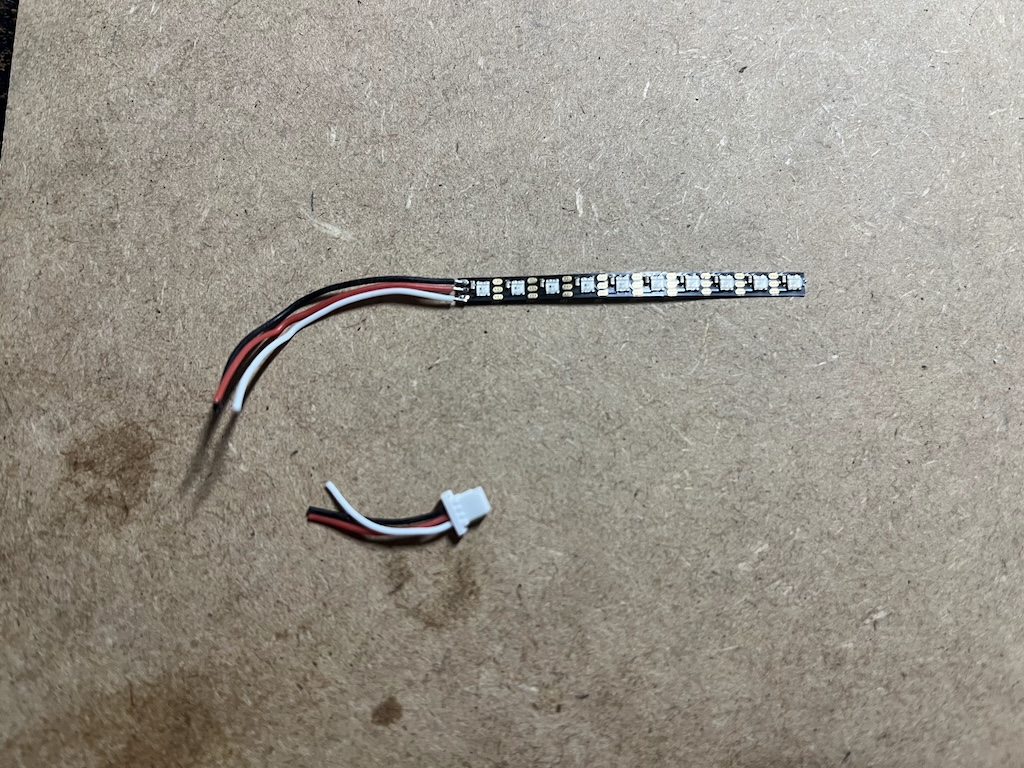
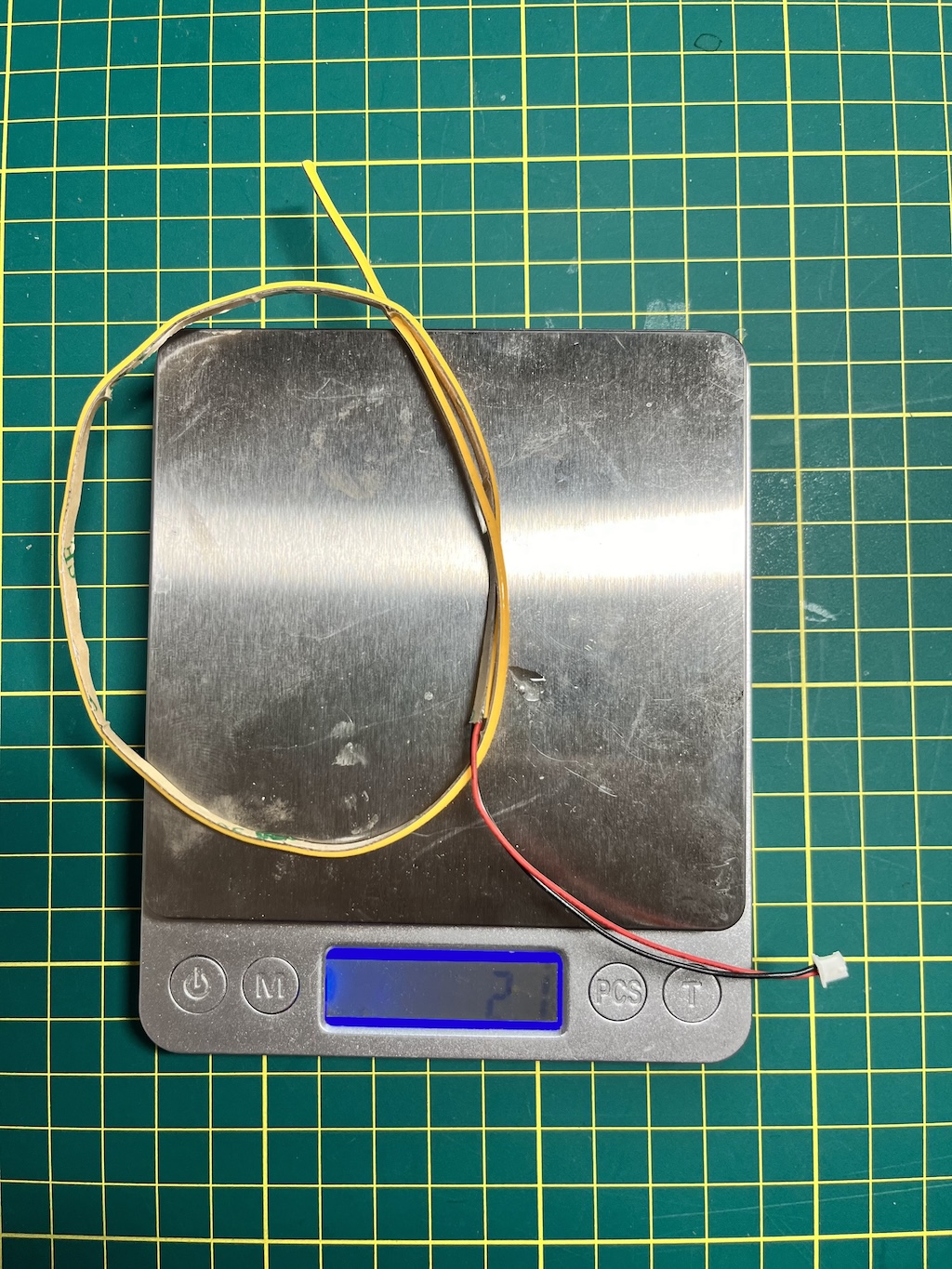
これと同じか互換性のあるLEDコントロールチップ(WS2811かWS2812)が搭載されたCOB LEDテープも簡単に入手できます。それを使えばBetaflightからLEDを制御できます。残念ながら日本のアマゾンを見ても、ほぼ全てがテープ幅が10mmか12mmもあります。大きなドローンならば、それでも構いませんが65mm機などには大きすぎます。そんな時にAliexpressで3.5mm幅のものを見つけたので入手しました。WS2812搭載で動作電圧は3.3Vから5Vとあります。これは小型のFPV機にピッタリです(というか商品説明にFPVのことが書いてあります)。

入手したのはLEDが10個の物ですが、20個のものも売っています。他のCOB LEDと同様に途中で切ることも出来ます。
FCへの接続は5V,GNDと信号線をLED端子に接続するだけなので簡単です。一方、Betaflightの設定は少しややこしいです。
[ 準備 ]
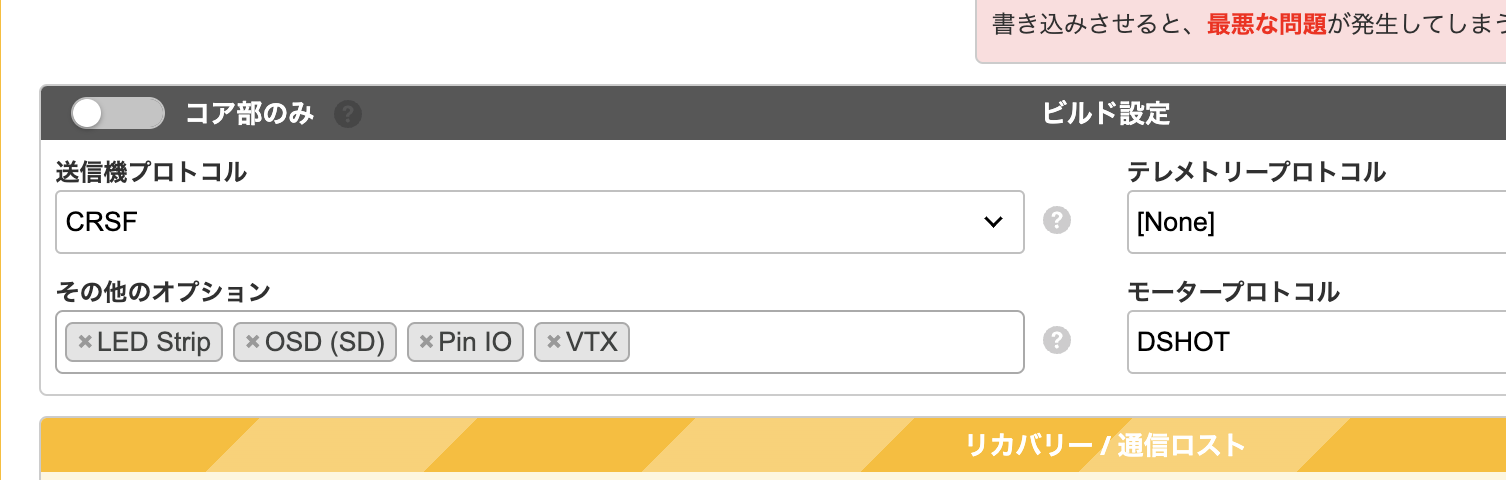
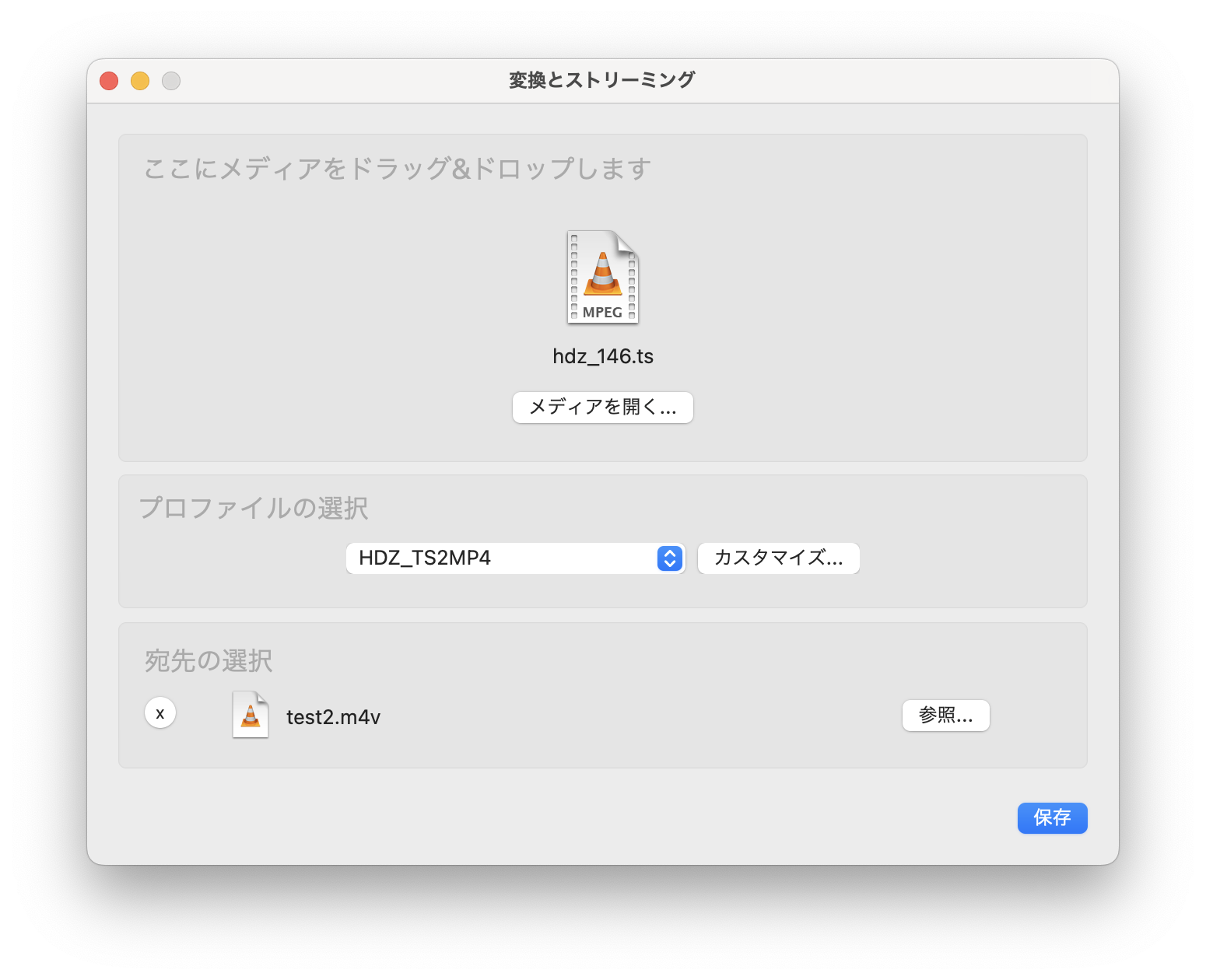
LEDストリップ設定を使うためにはビルド時にLED Stripオプションが必要です。

次に基本設定でLED_STRIPをオンにするとLEDストリップ画面が使えるようになります。
以下、Betaflight 4.4.3での設定例です。
[ ワイヤーオーダー ]
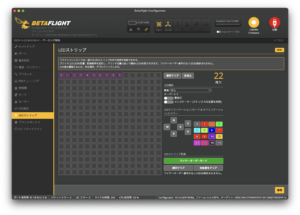
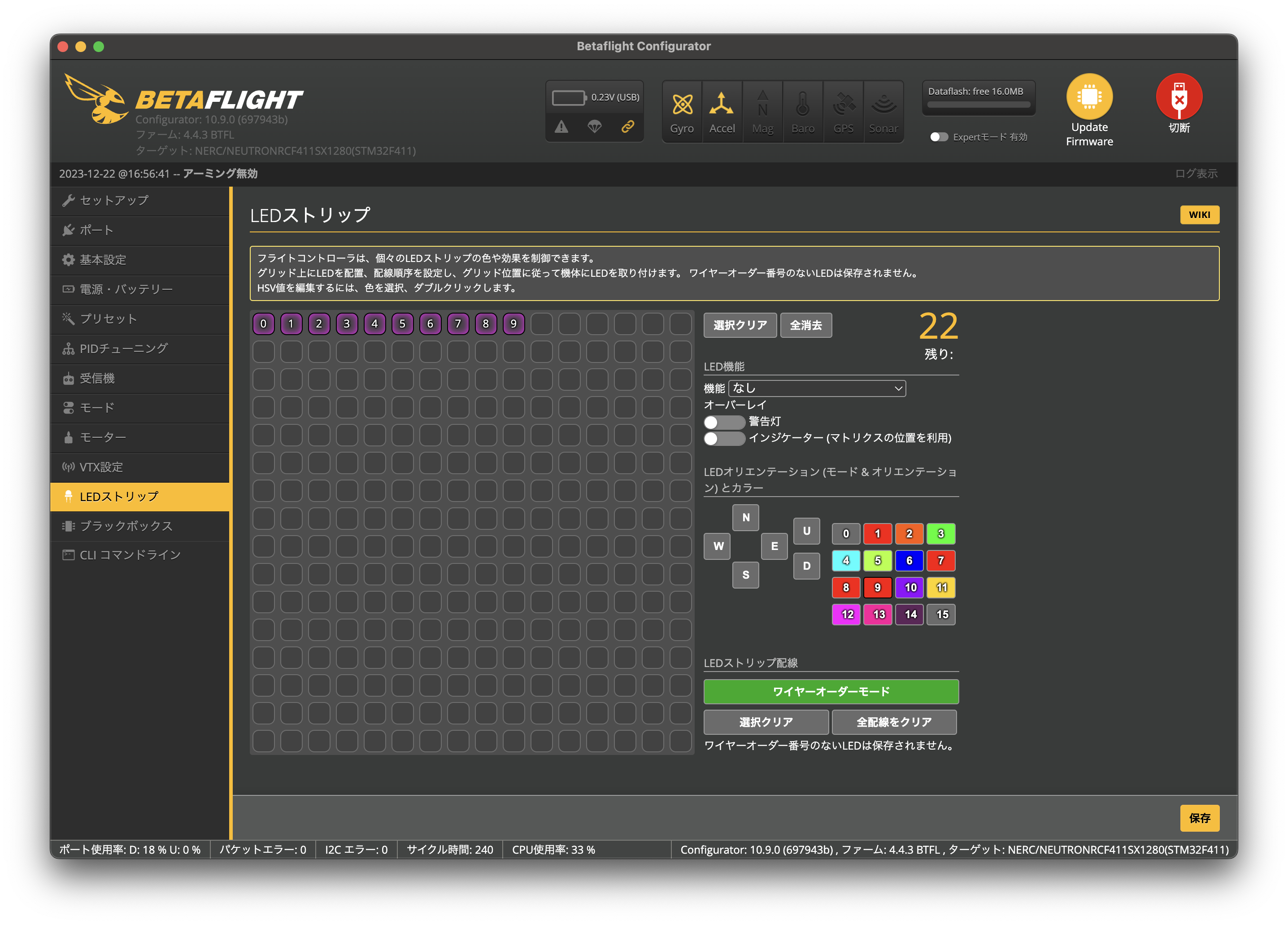
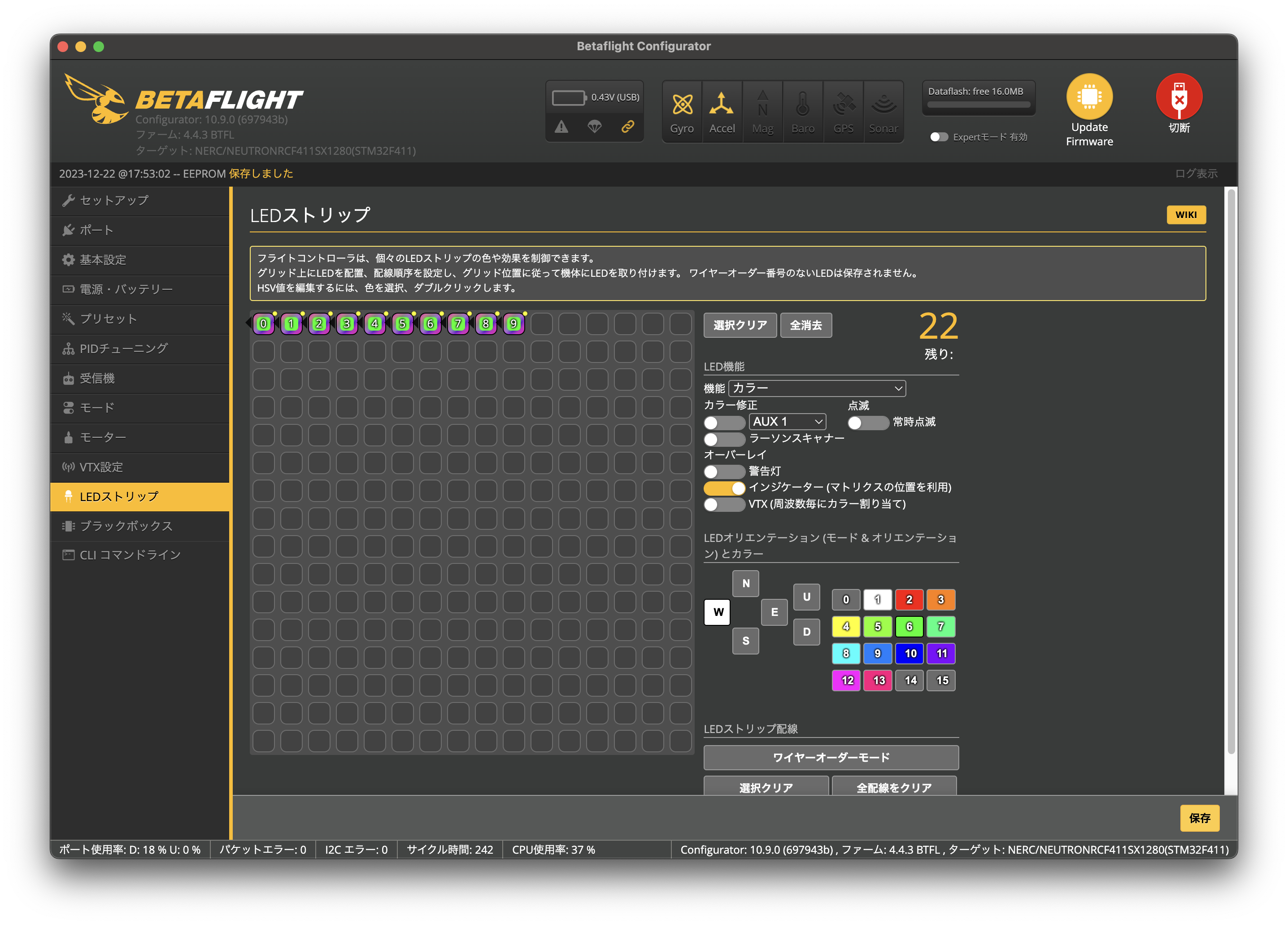
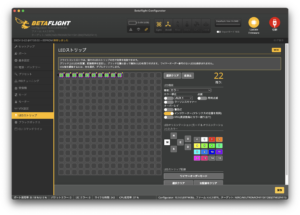
とにかく最初に設定しなければならないのはFCに何個のLEDが付いているかを知らせることです。これを行うのがワイヤーオーダーモードです。ワイヤーオーダーモードをクリックしてマトリックスのどこかをクリックすると数字が現れます。私の購入したものは10個のLEDが付いているので0から9の数字がどこかに現れるようにします。画面上のマトリックスはあまり気にしなくても良いです。どこでも良いので0から9の数字があれば動作します。また、一つ一つクリックしなくともマウスをスイープすると一度に沢山の数字を割り当てることが出来ます。マス目がマトリックスになっているのは、物理的なLEDの配置に合わせて適当に数字を置くことにより使用する人がわかりやすくなるだけでソフトウェアにとっては特に意味はありません。
割り当てが終わったらワイヤーオーダーモードを解除します。
[ カラー ]
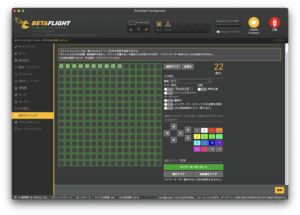
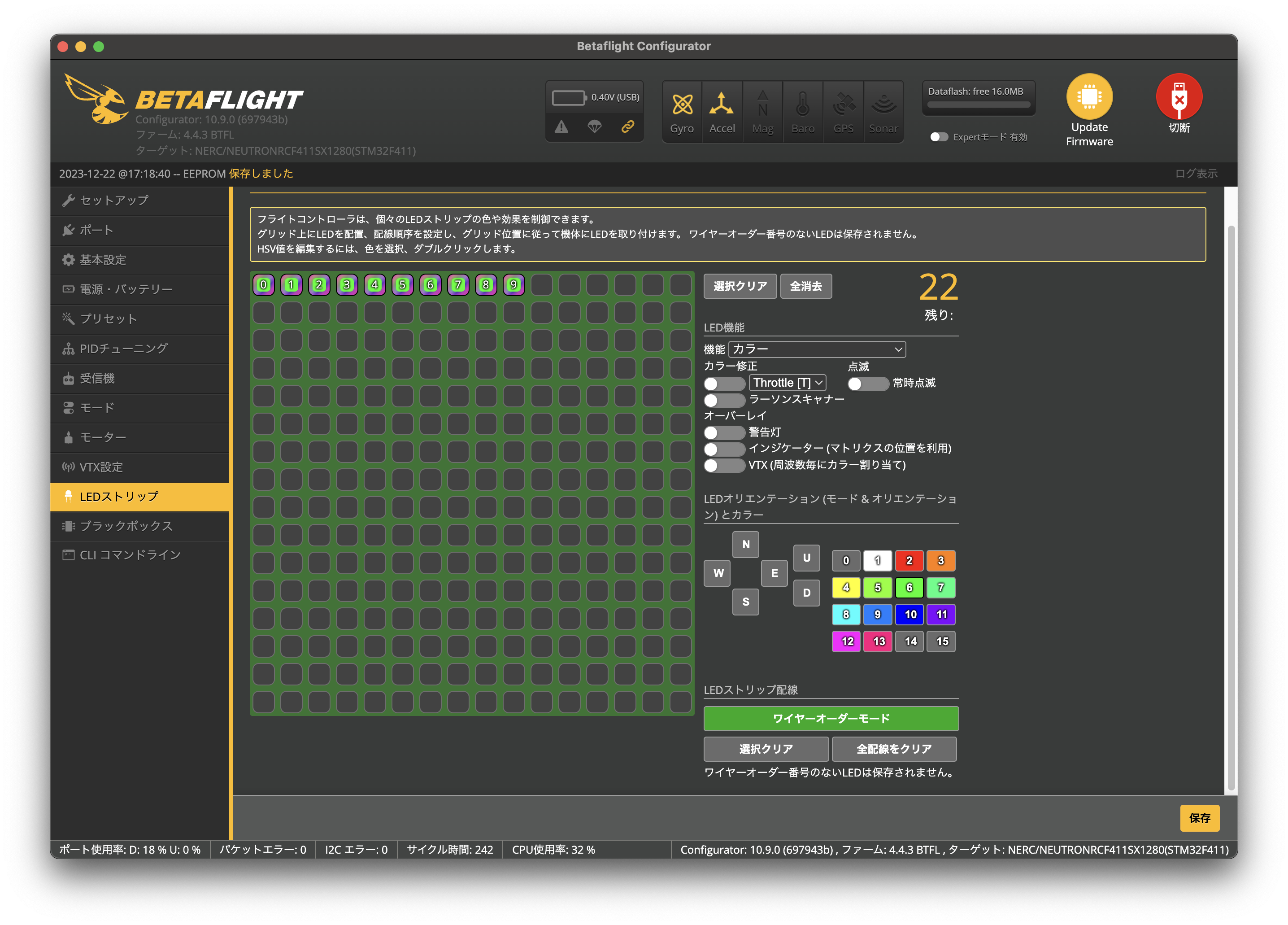
注) スクリーンショットのミスでワイヤーオーダーモードが光っていますが、この時点では解除されているべきです。
ともかく光らせてみます。マトリックスでLED0もしくはスワイプして全LEDを選択します。機能でカラーを選択します、そして下の色見本から適当な色をクリックします。保存すると選択した色で光ります。どれか一つのLEDを選択して常時点滅に指定すれば点滅します。また、複数に対してラーソンスキャナーを指定するとナイトライダー効果が得られます。まずはこれらの機能で色々と遊んでみましょう。
LED9番は点滅、その他のLEDは色違いでラーソンスキャナーに設定した例です。
カラー修正で送信機のスティックやスイッチを割り当てられます。適当なLEDを選んでRollやThrottleを割り当ててみます。するとスティックの動きに合わせて色が徐々に変化します。色の変化は最初に選んだ色とパレットの並びで決まっているようです。AUXなどのスイッチも同様です。パレットの色は自分で変更も出来ますので好みの変化を作り出すことが出来るかも知れません。残念なのはこの機能はLED毎に違うスティックやスイッチを割り当てることが出来ないことです。本当はROLLはこのLED、PITCHは別のLEDで変化させたいと思ったのですがうまくいきません(もしかするとバグっているだけなのかも)。
[ オーバーレイ ]
警告灯とVTXは検証していません。警告灯はFCがワーニングメッセージを表示ている時に機能し、VTXはSmartAudioで設定する周波数によって色を変化させられるらしいです。どちらにせよパイロットには見えませんし、周りで見ている人にも大して意味があるとは思えません。
インジケーターに期待したのですが、いくら設定しても思い通りに行きません。YouTubeに設定事例があるのですが、その通りにならないので現行のBetaflightがバグっているのかも知れません。とりあえず飛行中に変化させる設定を紹介します。複数のLEDを選択します。上の例では全てのLEDを選択していますが2個でも構いません。ただし、一つをアドレス前半、もう一つは後半のアドレスにします。そしてインジケーターをオンにして、オリエンテーションからW,N,S,E,U,Dのどれかを選択します。本来ならば、このWとかEに意味があるはずですが、どれを選んでも動作に変化はありませんでした。以上の設定にてROLL,PITCHの操作で何かしらのLED変化が得られます。
まずはPITCHを上に倒すと全点滅なのでアングルレーサーだと常に全点滅になってしまいます。PITCH下の時はROLL左右で半分ずつ点滅になります。スティクの角度で点滅の速度が変わります。
飛んでいる時に派手さを演出するためにはインジケーターとラーソンスキャナーを組み合わせるのが良いでしょうかね。