NAKA Drone Racing2024では使用するVTXチャネル毎に合わせたLEDを装着することがレギュレーションに入っています。色を合わせたLEDの搭載が難しい場合にはバッテリーと機体の間に挿入するLEDの貸与もあります(今のところBT2.0コネクターのみ)。それでも自分で搭載したLEDを使用することが望ましいのはいうまでもありません。
自分で色違いのLEDを準備して付け替えられるようにすることも考えられますし、FCから制御出来るRGB LEDを装着してVTXチャネルの変更で自動的にLEDの色を変更することも可能です。ここではRGB LEDを装着した場合のBetaflight Configuratorでの設定方法について必要な設定だけを書いておきます。
[ LEDについて ]
LEDの種類について簡単に書いておきます。最近流行りの全周LEDで使用されているのは、おそらく単色LEDと思います。+と-の線だけがLEDにあり電源を接続すれば光ります。これは一般的には色の変更が出来ないLEDになります。
この記事で言うところのRGB LEDというのは電源に加えて信号線があります。これをFC上のLEDポートに接続することによりBetaflightからの制御が可能になります。

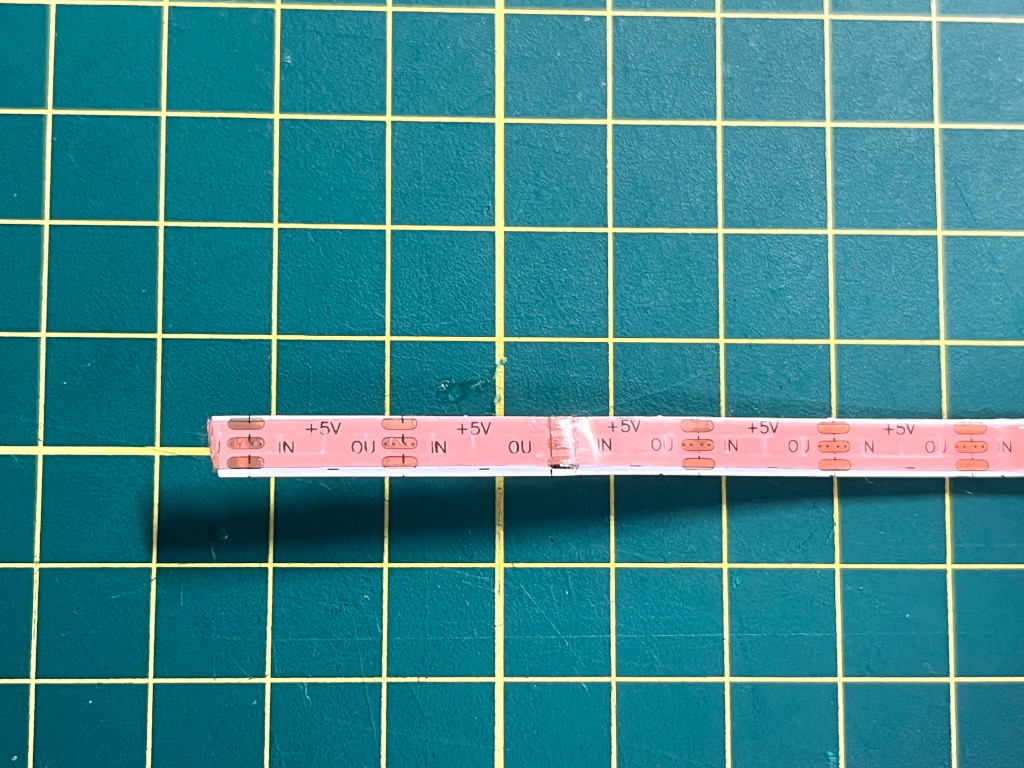
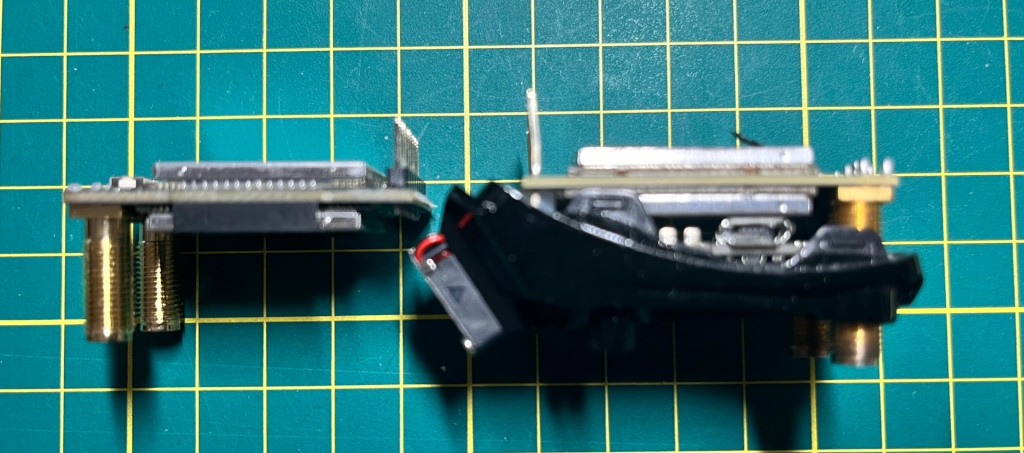
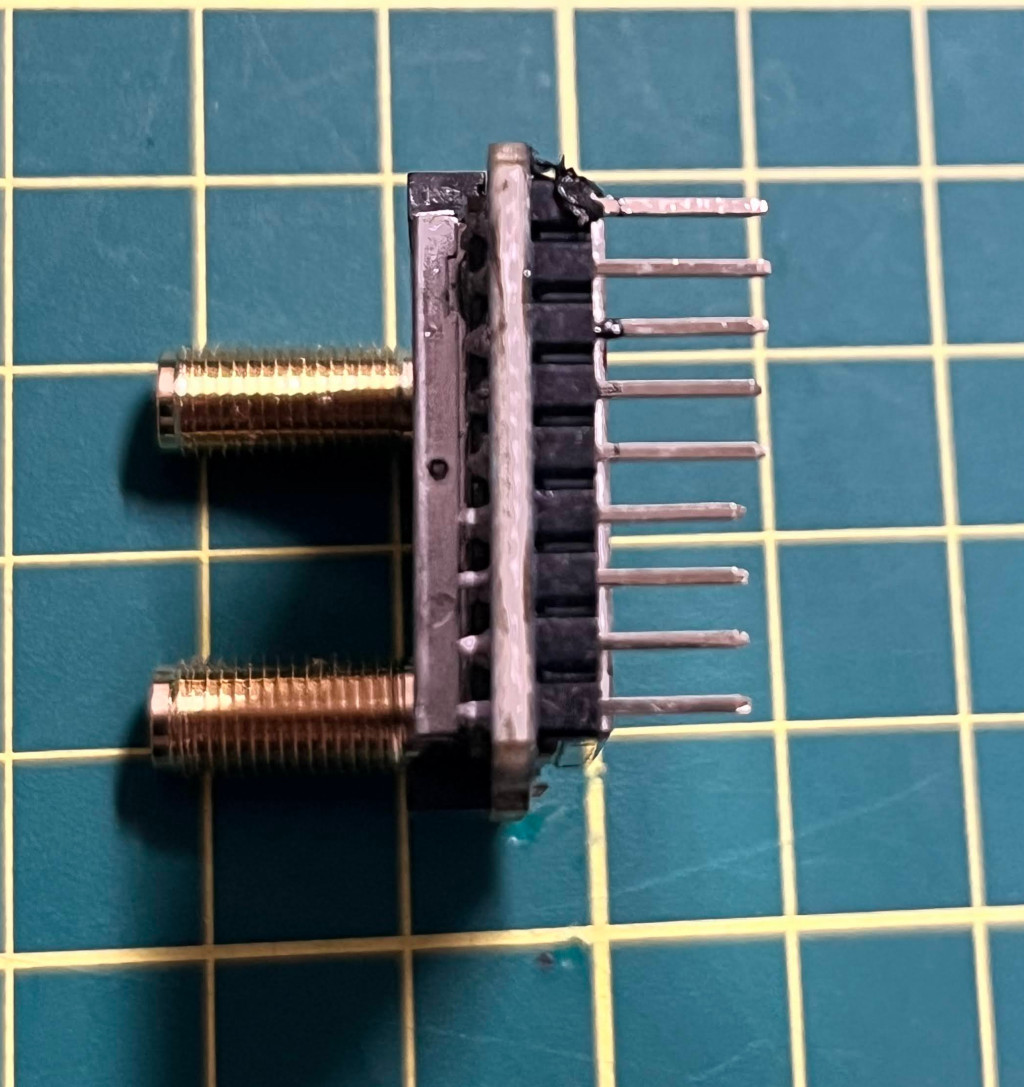
写真はKOU_CHAN@LEDで購入したものです。このようにCOBタイプのものですと、一つのLEDセルに対して+5V, -, IN, OUTの4端子が出ています。信号はINから入ってOUTを経て次のLEDのINへと受け継がれて行きます。このためFCからの信号はINに接続してください。
[ BetaFPVのFCにLED Strip関連の不具合 ]
一部のBetaFPVのFCにてLED Stripを有効にするとモーターが回らなくなる不具合があるようです。「LEDつないだらモーターが動かなくなった時(Betaflight)」によると’set dshot_bitbang = OFF’で直ることがあるようです。最後の方に書かれていますが、’set dshot_bitbang_timer = TIM8’が有効であるという情報もあるようです。
[ 前提 ]
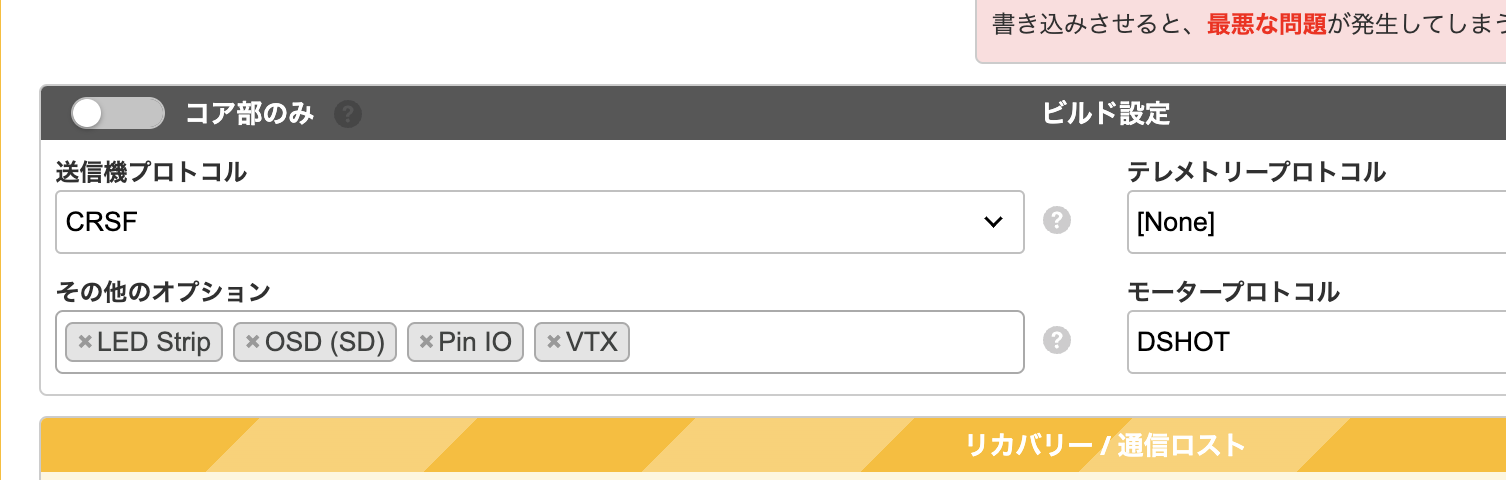
Betaflight Configuratorの「基本設定」でLED_STRIPをオンにして「LEDストリップ」タブが現れること。もしこれが出ない場合Firmwareビルドの際にLED Stripオプションが入っていなかった可能性があります。LED Stripを含めてFirmware更新をやり直してみてください。

[ LEDストリップの設定 ]
1. ワイヤーオーダー
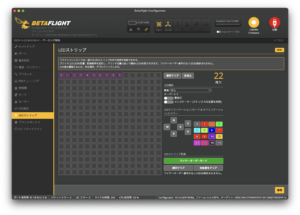
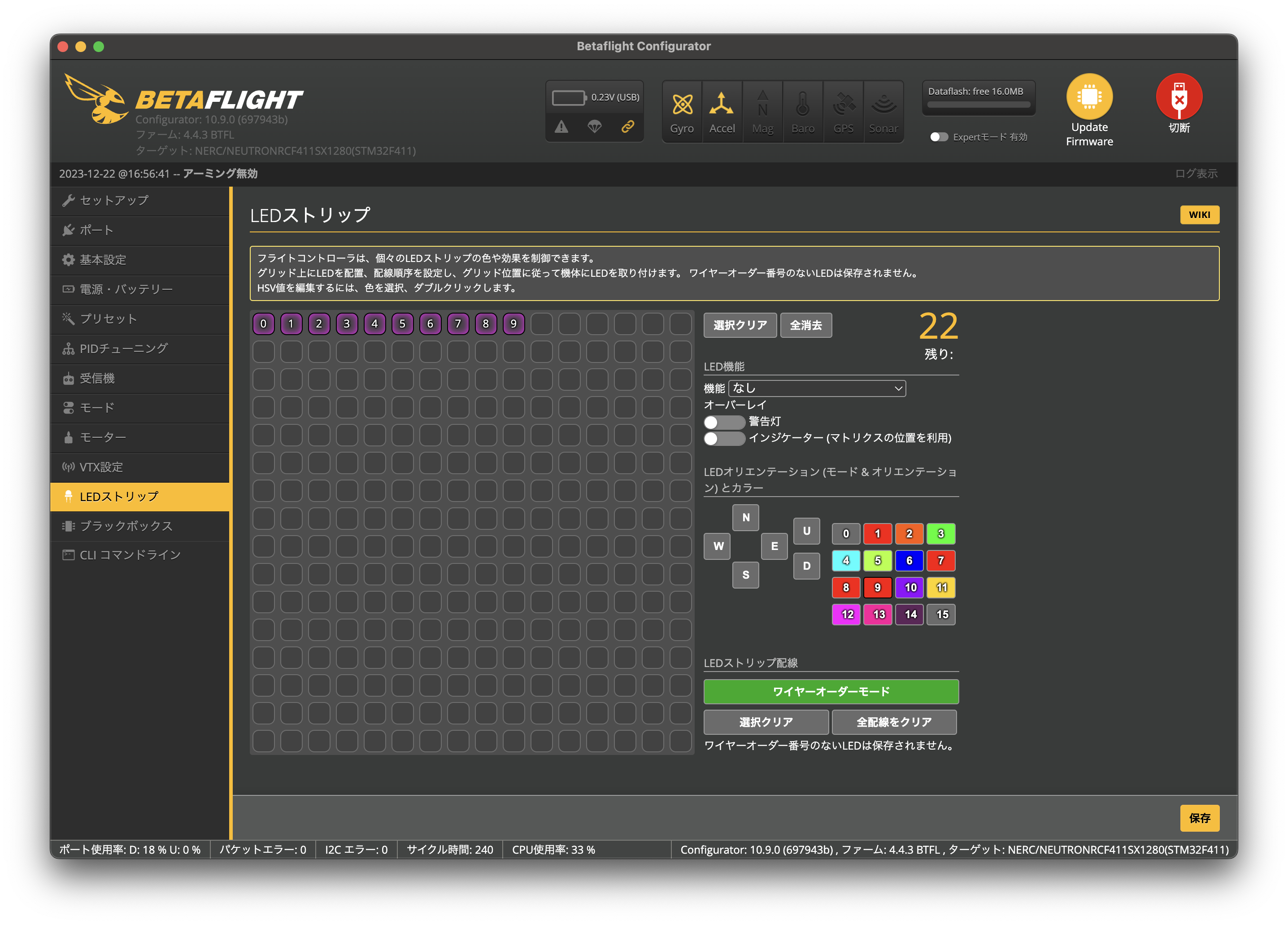
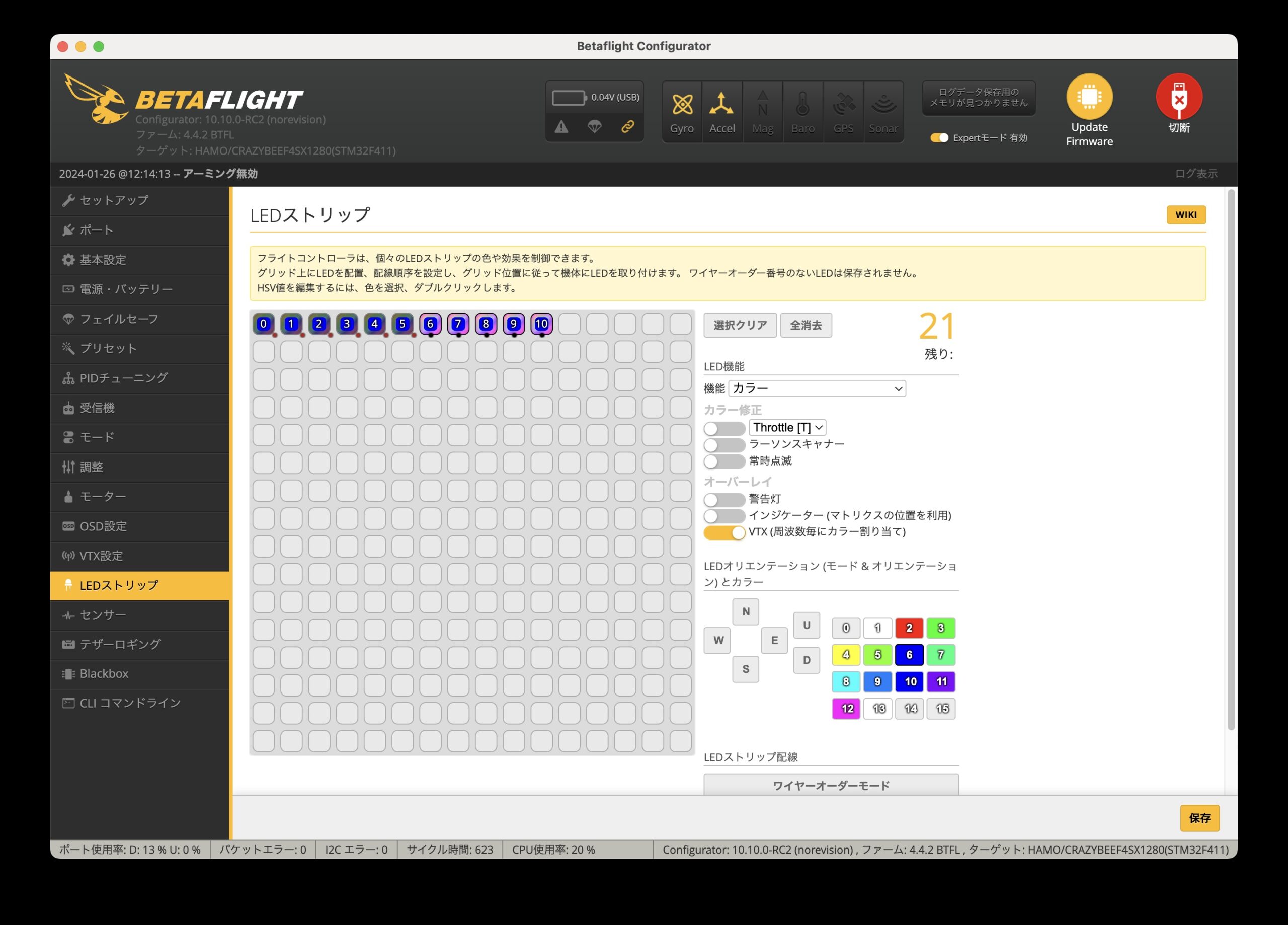
最初に必要なのはLEDが何個ついているかを設定することです。”ワイヤーオーダーモード”ボタンを押した後でマトリックス部分をクリックするとLED番号が割り当てられます。スイープして複数のマスを一気に設定することも出来ます。マトリックス上の位置は特に気にする必要はありません。必要な数のLEDが指定されればOKです。もし10灯のLEDであれば番号0から9がどこかに表示されるようにします。完了したら”ワイヤーオーダーモード”ボタンを再度押してワイヤーオーダーモードから抜けてください。
2. 機能の設定
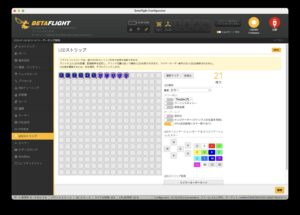
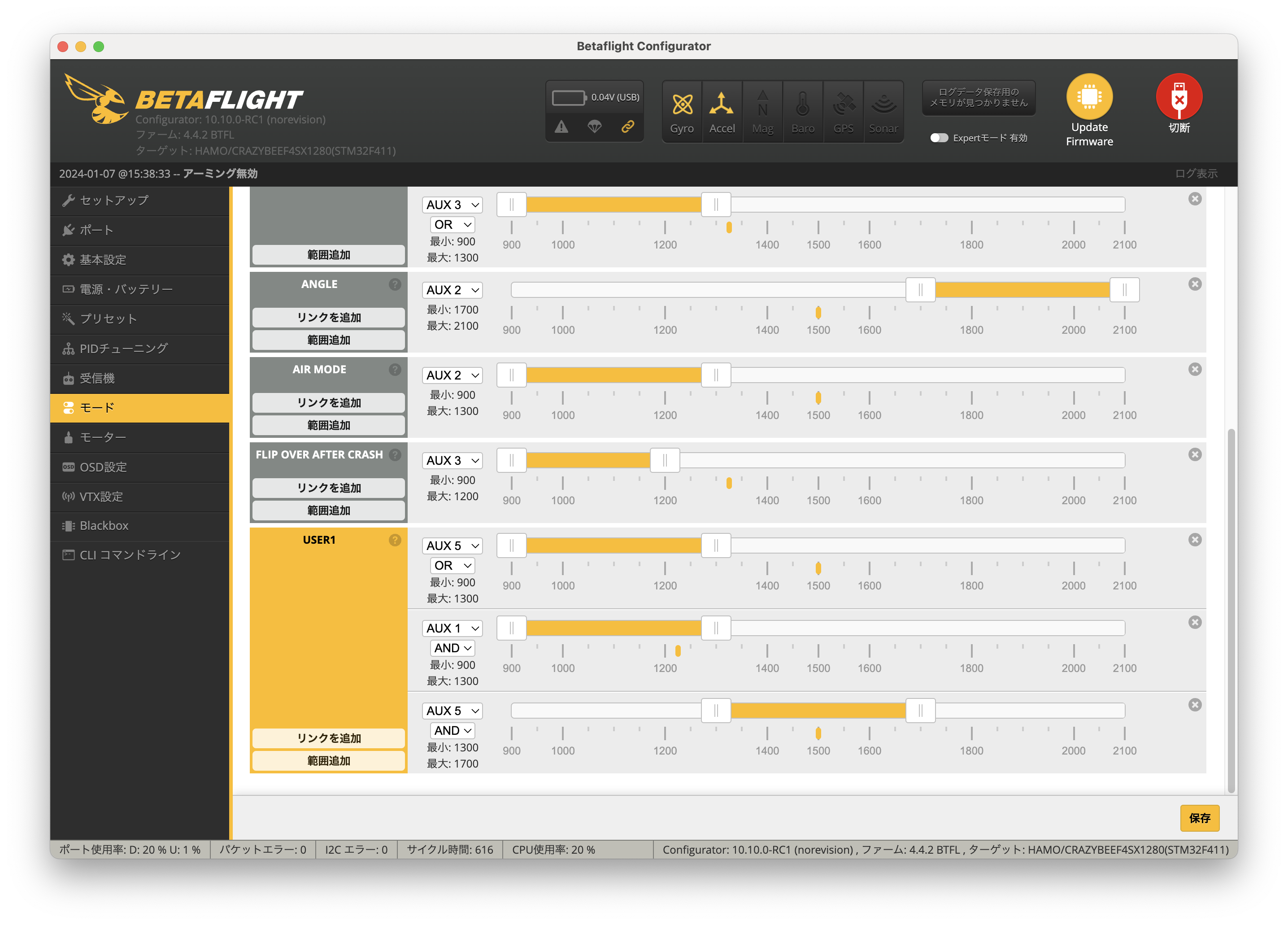
全部あるいは設定したいLEDをマトリックス上で選択し”機能”を”カラー”にします。続いて”オーバーレイ”のところにあるVTXをオンにします。
これでVTX周波数によるLEDの色変更が出来るようになりました。
3. カラーパレットの変更
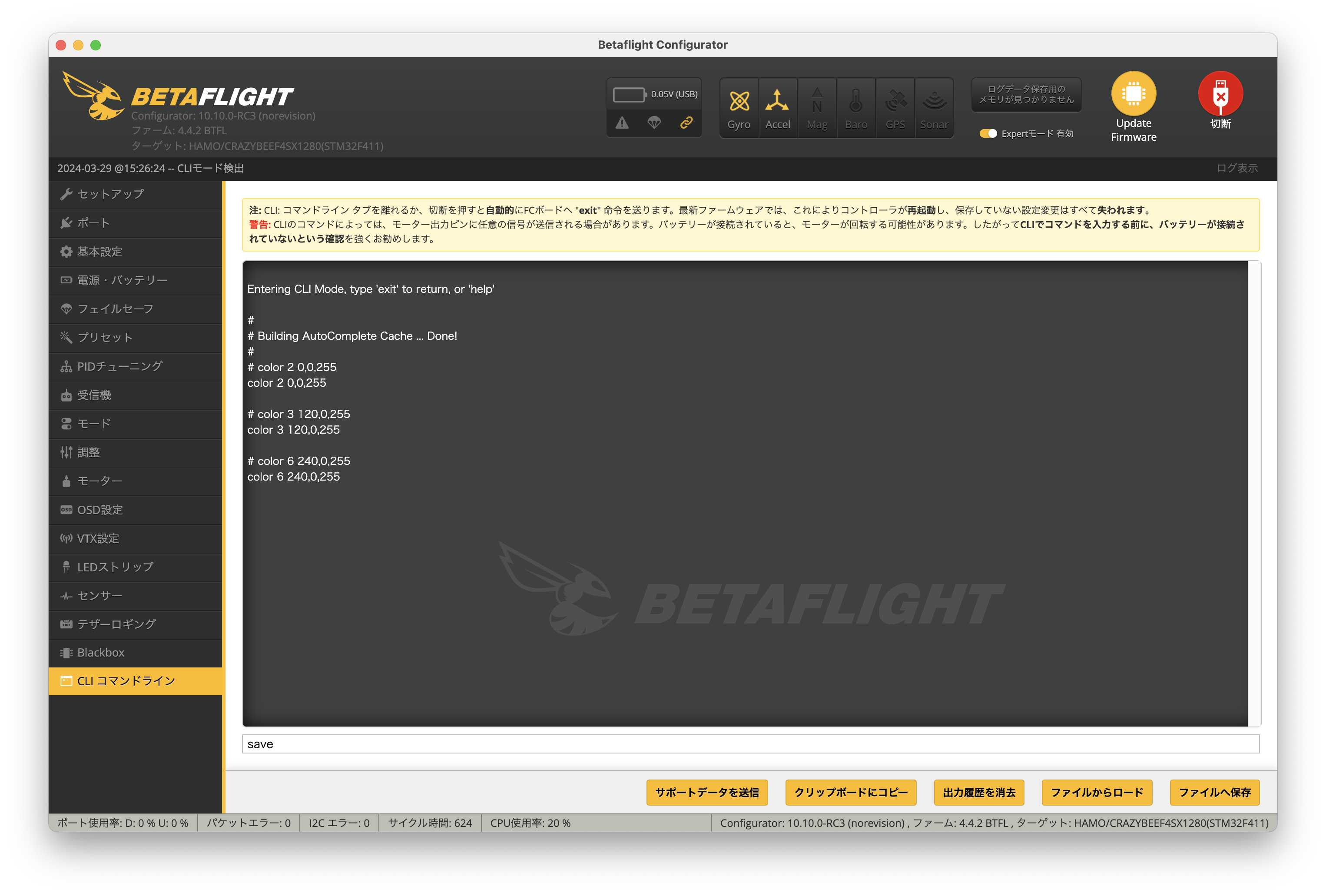
Betaflightの規定値のままだと目的の色になっていません。「CLIコマンドライン」にて以下のコマンド列を投入してください。
color 2 0,0,255
color 3 120,0,255
color 6 240,0,255
save
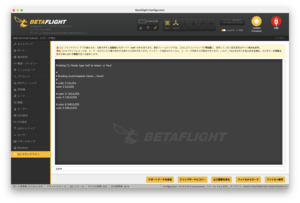
具体的には「CLIコマンドライン」を開き、下の方の入力欄に上のコマンドを投入します。スクリーショットでは分かりやすくするためにコマンドを一つ一つ入力した様子を示していますが、上の4行のコマンド(colorが3行とsaveコマンド)を一度にコピーして貼り付ける事が出来ます。saveコマンドを投入後はBetaflightが再起動します。
以上で完成です。VTXチャネルを変更して正しい色が出るかどうか確認してみてください。
実際に設定してみた動画です。ELRS Luaスクリプトからの変更例ですが、OSDスティックコマンドによるVTXチャネル変更でもLED色の変更は行われます。