前回、手順は確認出来ました。次に探求すべきはどのモデルを使いepochsに何回指定すれば良いのかということです。まずはepcohs=200で各種モデルのテストをしてみようと思い立ちましたが、M2 MacBook AirではいくらGPU使ってもモデルによっては一晩では学習が完了しないということが分かりました。メモリーサイズの関係で生成出来ないモデルもあります。それは諦めるとしても時間がかかってしょうがない。目標が定まれば時間をかけて生成するのも悪くはないですが、試行錯誤のためには素早く終わらせたい。
高価なGPUを買いに走るわけにも行かないのでGoogle Colabを試してみることにしました。最初、無料版で試していましたが、色々と試しているとすぐに使用制限がかかって止まってしまいます。多分、何をするかが決まっていれば無料版だけでも大丈夫かも知れませんが、ストレス無くテストを行うために一番安いPay As You Goの1179円を支払って100コンピューティング単位を買いました。この単位がどれくらいのものかは分かりませんが、一連のテストで消費したのは17単位ほどでしたので、小規模なテストには十分でしょう。速度については申し分ないです。M2 MacBook Airで一晩で終わらない学習が無料で使えるGPUでも10分ほどで完了します。
以下、Colabでの実行例です。
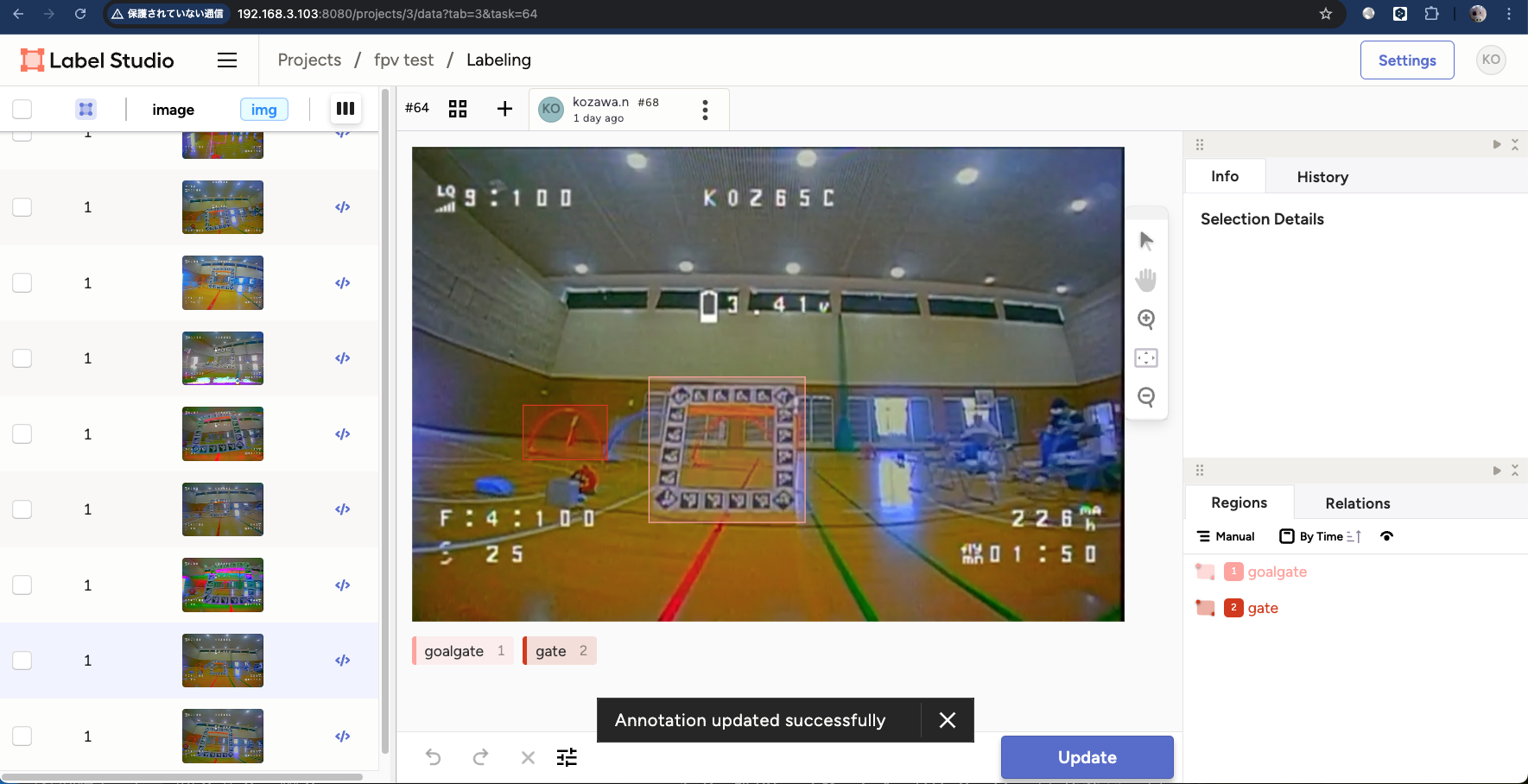
前回、Label StudioからExportしたデータはGoogle Driveにアップロードしました。Colabノートブック内にアップロードする方法もありますが、ノートブックを接続解除(頻繁に行う可能性があります)するたびに消えてしまうので使い勝手が良くありません。
yamlファイルもGoogel Driveに作成します。
# fpvgoals dataset
# train and val data as 1) directory: path/images/, 2) file: path/images.txt, or 3) list: [path1/images/, path2/images/]
train: /content/drive/My Drive/fpvgates
val: /content/drive/My Drive/fpvgates
# number of classes
nc: 2
# class names
names: ['gate', 'goalgate']Google Colabで新規ノートブックを作ります。
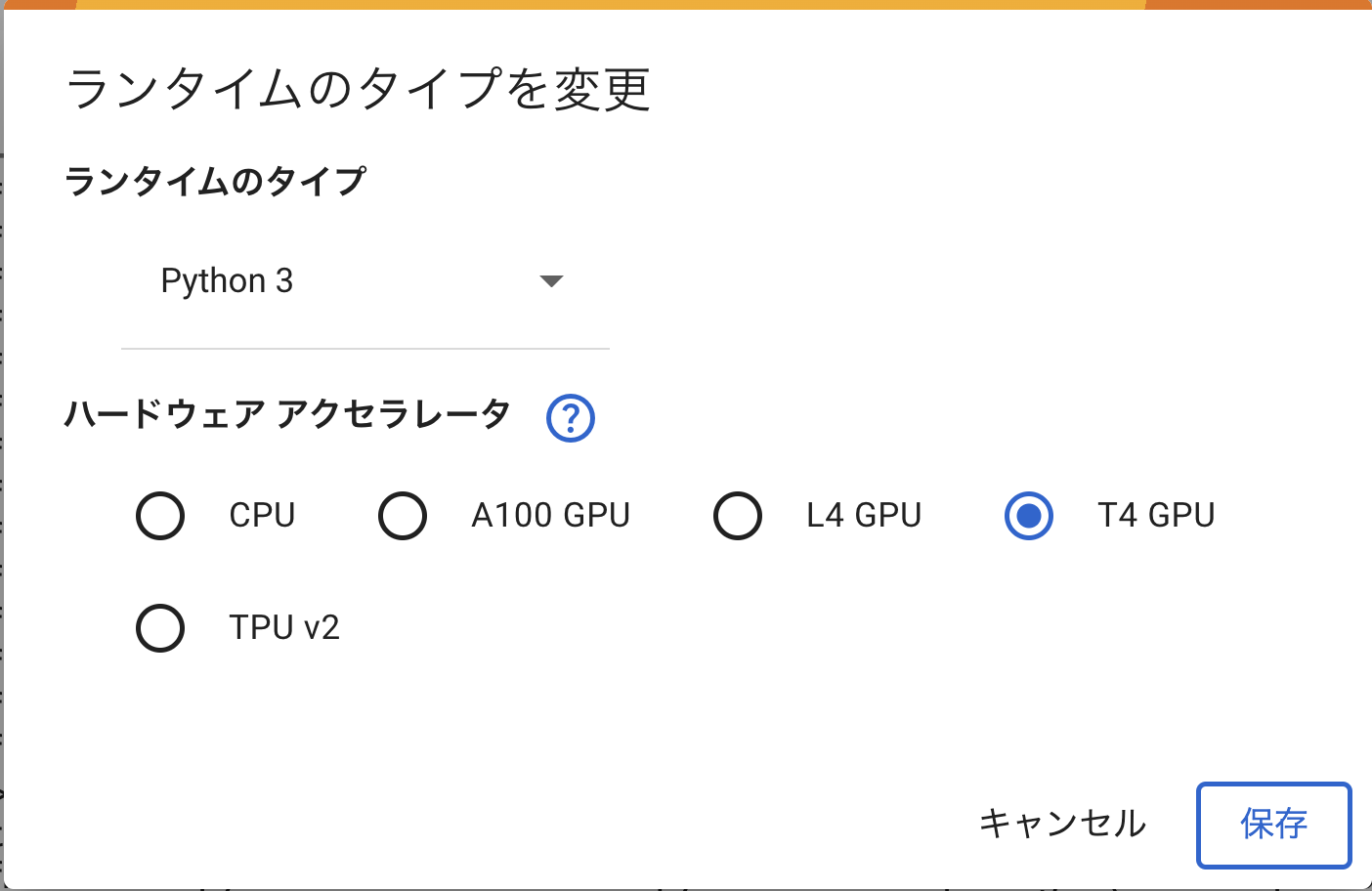
「ランタイム/ランタイムの変更」でT4 GPUを選択します。下のスクリーンショットは課金した後なので選択肢が多くなっています。
!pip install ultralyticsを実行しUltralyticsを導入します。
そして以下のコードを貼り付けて実行します。
import time
start = time.time()
print(f'start time: {start}')
from ultralytics import YOLO
model = YOLO('yolov9m.pt')
model.info()
model.train(data='/content/drive/My Drive/fpvgoals.yaml', epochs=200, imgsz=640)
trained = time.time()
print(f'elpased time: {trained-start}')
model.val()
end = time.time()
print(f'end time: {end - start}')Colabの画面だとこんな感じです。

これでモデルを変えたりepochsに指定する数値を変更して試してみました。元になるデータは最初に用意した56枚の画像です。
ざっくりと目視でトラッキング画像で判断して、重いモデルを使用するほど精度は良くなりそう。またepochsは20回より200回がはるかに良いという当たり前のことが確認できました。精度(誤認識の程度)が目的に適っているかどうかは簡単なプログラムを書いて確認しました(プログラムについてはいずれ紹介します)。その結果、軽めのモデルでも十分な結果が出せそうだということも分かりました。
軽いモデルの利点は学習時間が短い、大きなメモリーを必要としないということは既に分かっていましたが、それに加えて画像認識に要する時間が短いという特性があります。これはリアルタイム処理能力を考えるうえで重要なポイントになります。
| ベース・モデル | 1フレームの処理時間 | fps |
|---|---|---|
| yolov9t.pt | 45ms | 22.2 |
| yolov9s.pt | 45ms | 22.2 |
| yolov9m.pt | 75ms | 13.3 |
| yolov9c.pt | 86ms | 11.6 |
| yolov9e.pt | 152ms | 6.6 |
| yolo10n.pt | 42ms | 23.8 |
| yolo10s.pt | 64ms | 15.6 |
| yolo10m.pt | 57ms | 17.5 |
| yolo10b.pt | 79ms | 12.7 |
| yolo10l.pt | 90ms | 11.1 |
| yolo10x.pt | 115ms | 8.7 |
これはM2 MacBook Airでの実行例です。22FPS出ているとまずまず目的に適っている気がします。ということでyolov9s.ptを使用する事にしました。yolov10nの方が速度が出ているのですが、まあ何となく感で決めました。
epochsについては200,300と400で比較してみましたが、見た目での差はほとんど分かりませんでした。result.pngで表示されるグラフについても微妙な差でした。勘でしかありませんが当面はepoch=300で進めてみます。
あとは元となる画像を増やしていって何かしら問題点があるかどうかを試していきたいです。