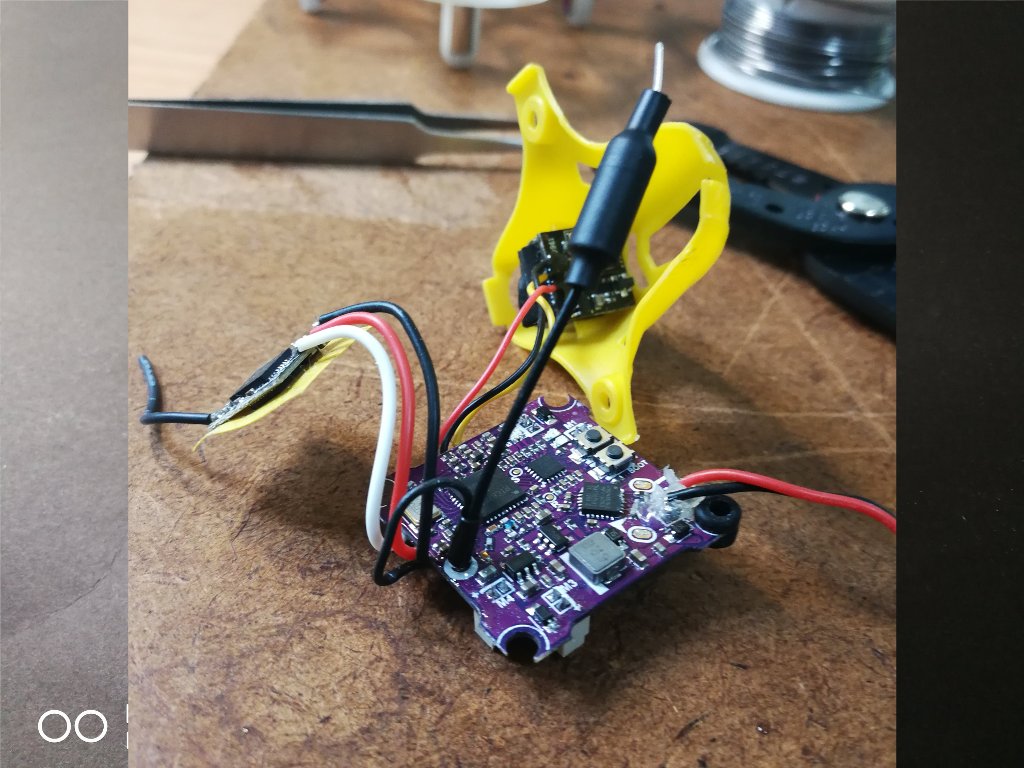
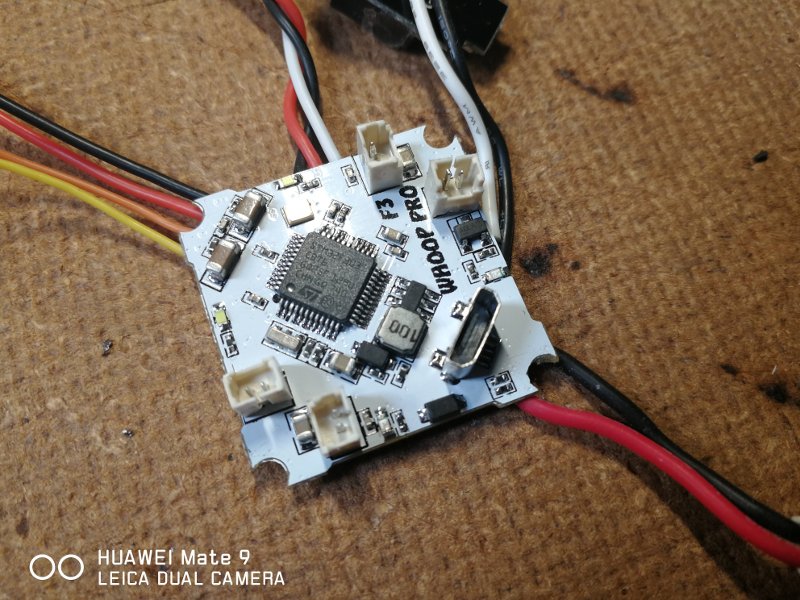
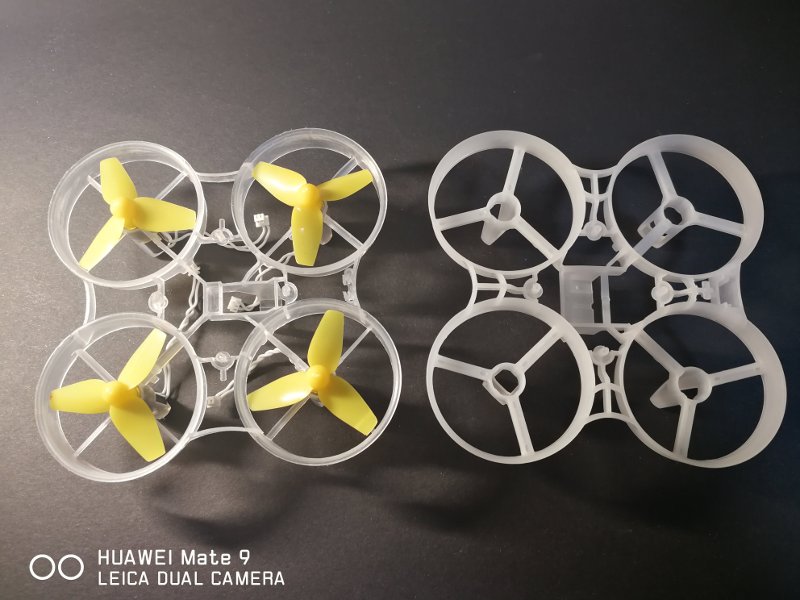
KingKong Tiny7は人気のあるTinyWhoopで7mmモーターを搭載し屋外での非行も可能な小型のFPVドローンです。
RTF(Ready to Fly)で送信機セットを購入すれば手間なしですがBNF(Bind and Fly)ですといろいろと設定を行わないとプロペラを回すことさえままなりません。そこでいつも通り自分への覚え書き的に手順を書き残しておきます。
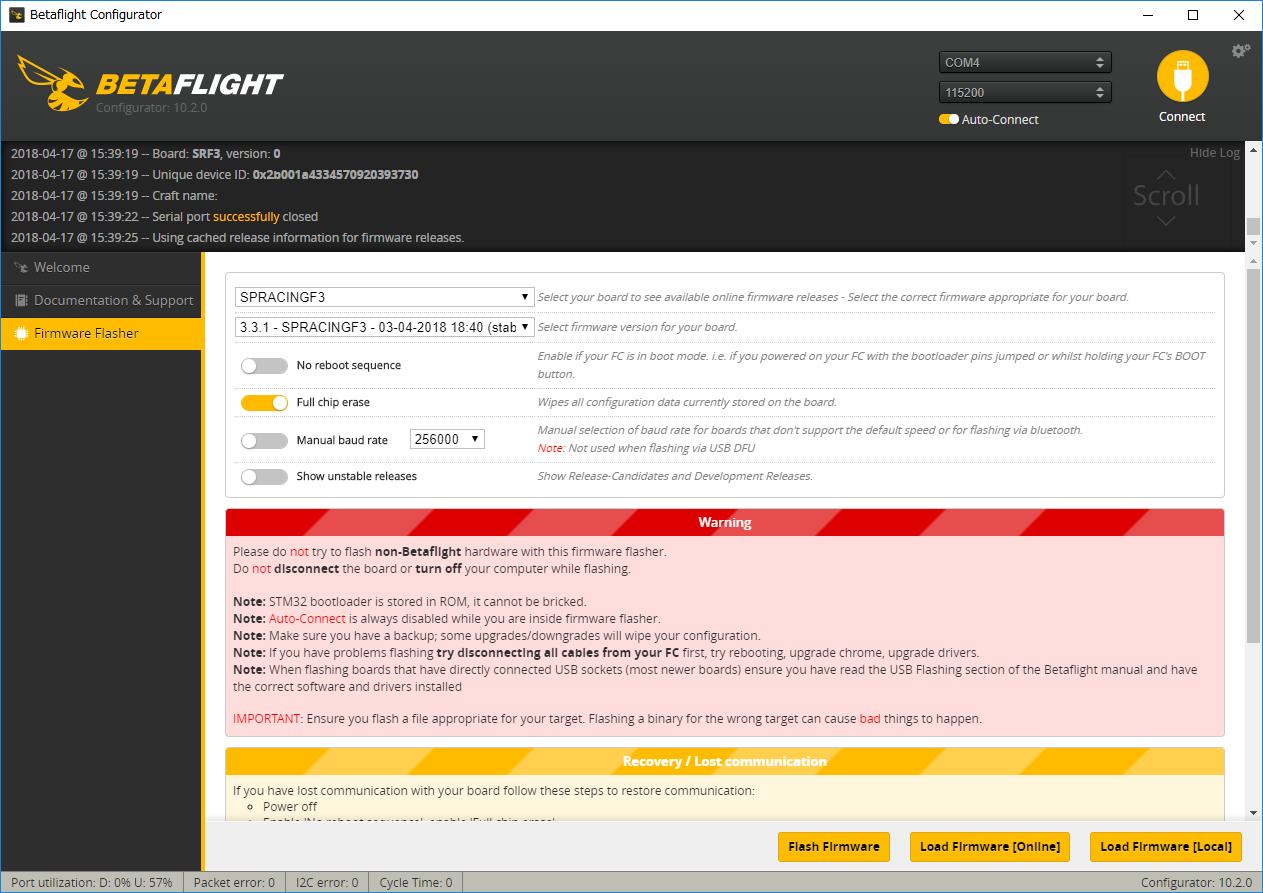
一番大事なのは最初にTiny7の初期設定を保管しておくことです。どこをいじったか把握しているにもかかわらず不調になることもありますので、設定画面を開くより先にバックアップします。画面のボタンでバックアップというのがあるので、それも取得しましたが、結局のところCLI DUMPというものが必要で、それに全て含まれるようです。CLIというコマンドラインの画面でdumpコマンドを実行し表示されたものをテキストファイルに保管しておきます。初期設定に戻すためにはこのテキストファイルの内容を一気にCLIのコマンドラインにコピペし、saveコマンドを実行すればOKです。実際、これに何度救われたことやら。
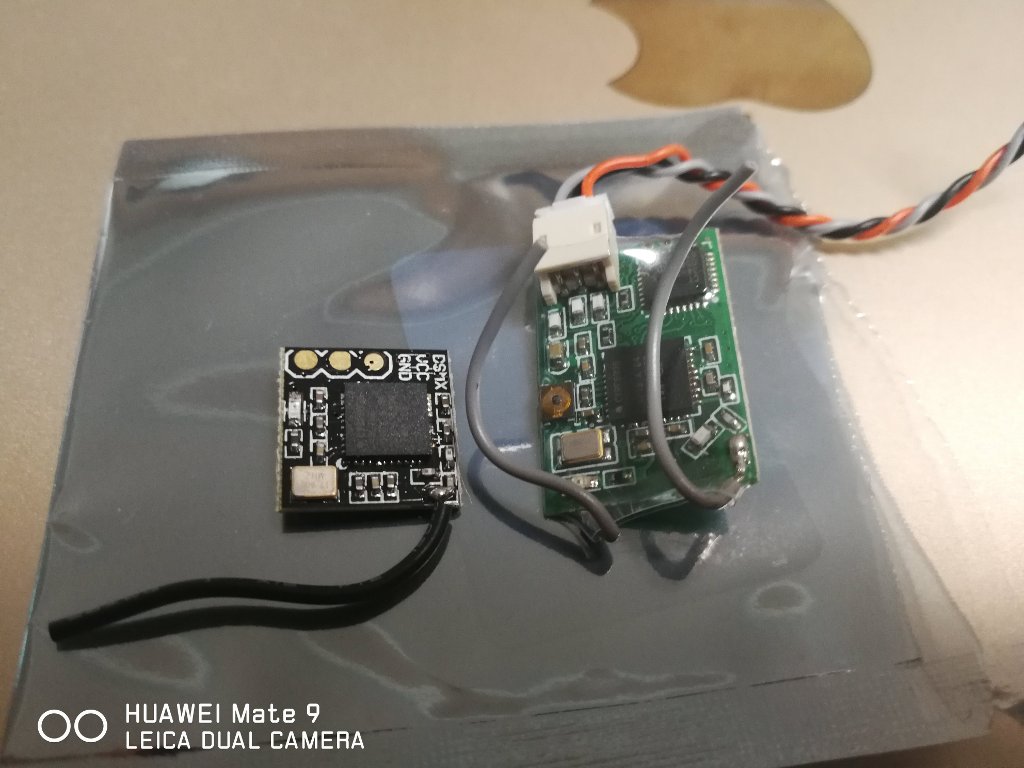
まずはRC(送信機)とバインド出来ないと話になりません。Tiny7は色々な種類の受信機に対応しています。わたしは送信機に組み込み済みのプロトコルに合わせてDSM2/DSMX受信機を購入しました。わたしのTiny7側の設定は初期設定のままでDSMXプロトコルで接続出来ていました。バインドはスイッチ付きの受信機なので、スイッチを押しながら電源をいれればバインドモードに入るので簡単です。
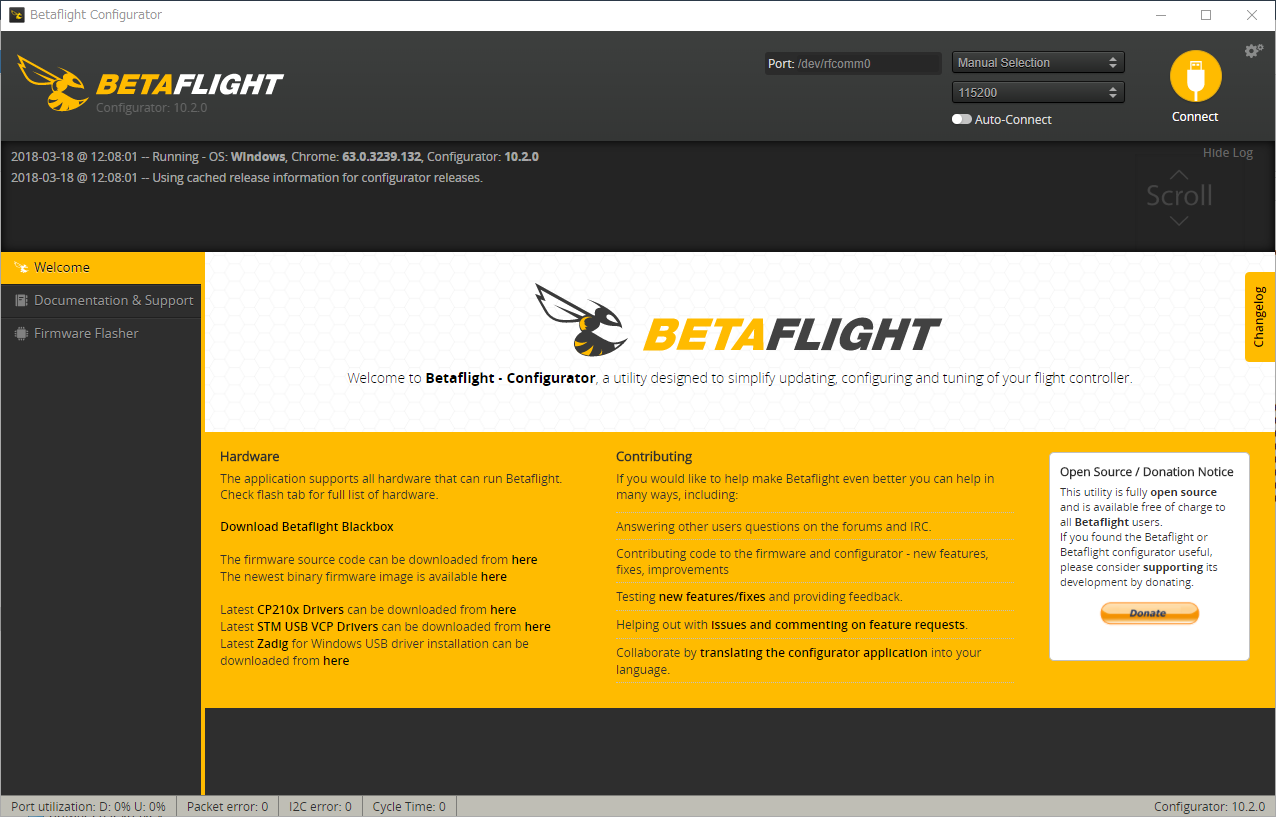
接続出来ていることは受信機のLEDで分かりますがBetaflightのReciever画面で確認するのが確実です。ここで各スティックの動きやスイッチの動作が確認できます。
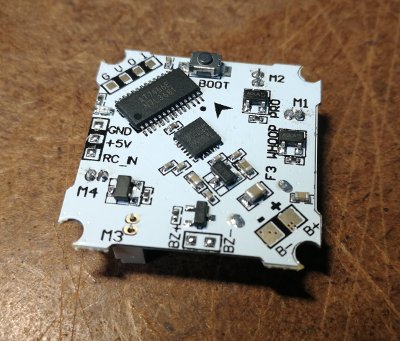
このままでは受信機は機能しているのにスロットルを上げてもプロペラが回りません。色々調べていくと、どうもARMというスイッチの設定が必要なようです。これには送信機側でスイッチを使うための設定が必要です。わたしはDEVO10という送信機にDeviationというファームウェアを入れて使用しています。この設定がなかなか難解です。幸いなことにDeviation Forumにiniファイルがアップロードされていましたので、それを使わさせて頂くことにしました。
KingKong Tiny7 DSM2 Devo F12E
最初の投稿に添付されているファイルを使いました。これはDSM2用なのでプロトコルをDSMXに変更、あと各舵の可動範囲も若干調整しましたが、そのままでも大丈夫です。あと設定templateの読み込みはresetした状態から行わないと、それまでの設定が残ってしまい期待通りにならないこともあります。
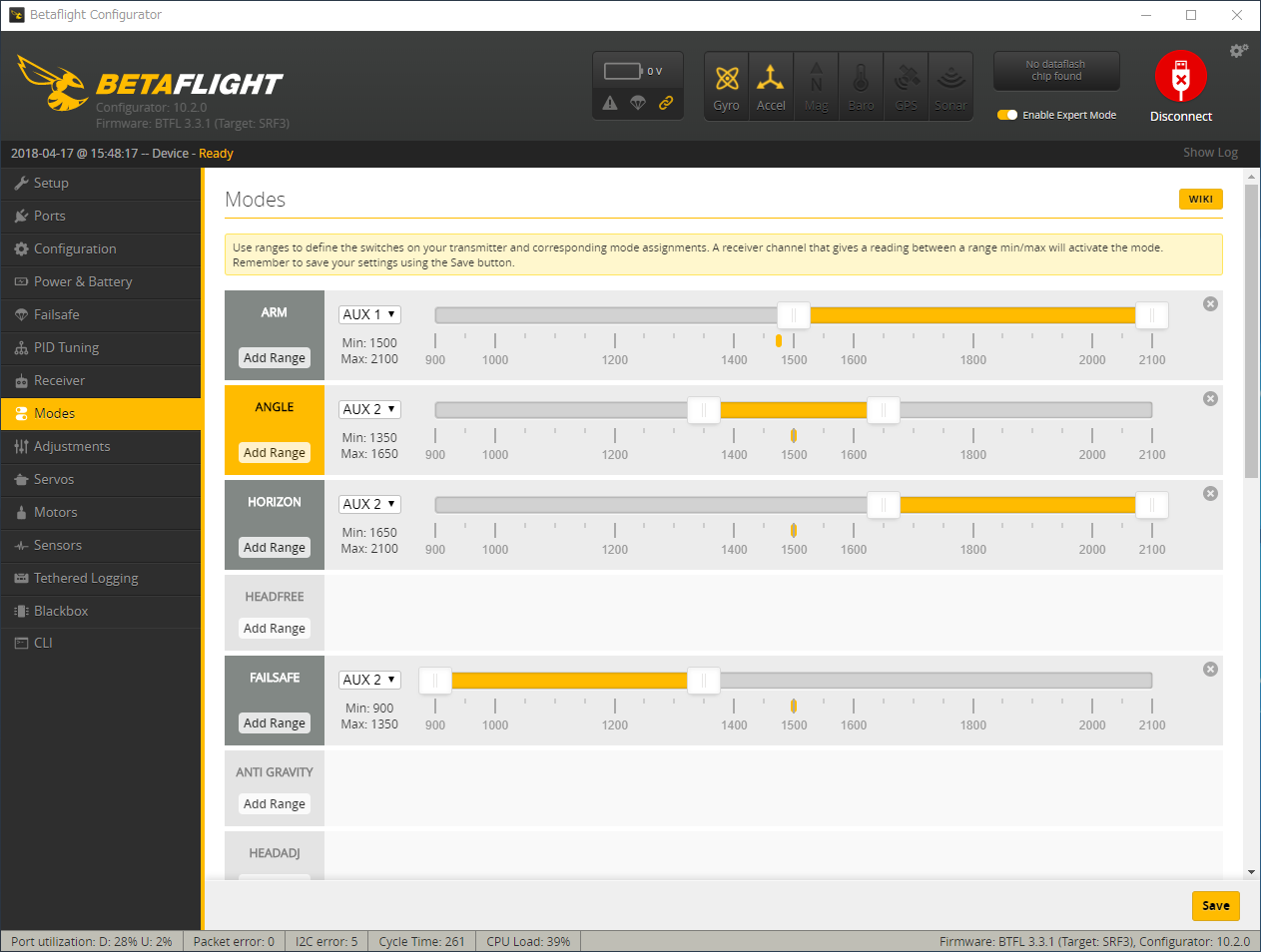
再びBetaflightのReciever画面に戻りスイッチの動きを確認します。使用するスイッチは送信機の左上のスイッチと右上にある3ポジションのスイッチです。動きが確認できたらMode画面で四つのステータスに割り付けます。この方法については以下のYoutubeビデオの最後のところがよく分かりますので参照ください。
Kingkong Tiny 7 RTF Quick Review Plus Betaflight Setup For Horizon and Air modes
これで飛行準備完了です。電源を上げ、スロットルを一番下にしてARMスイッチをオン。後はスロットルを上げれば飛行開始です。
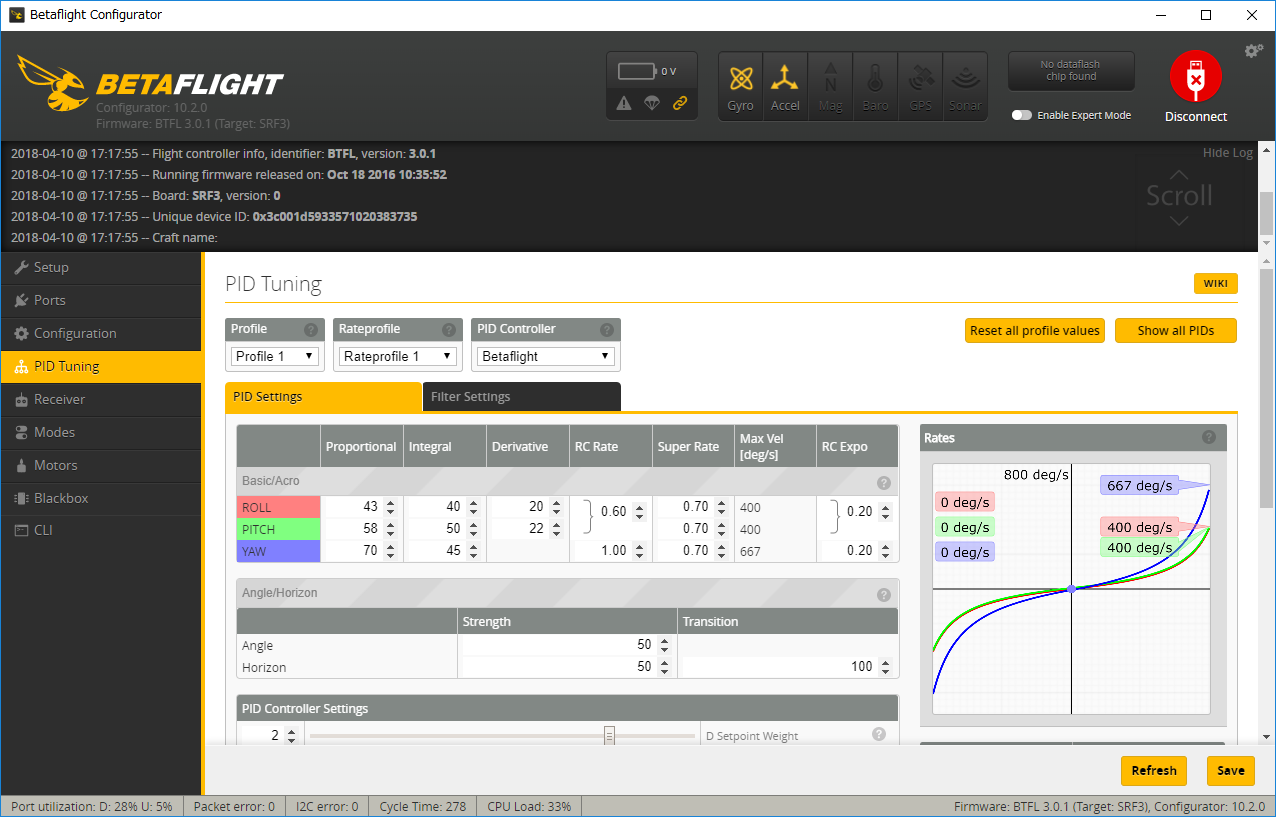
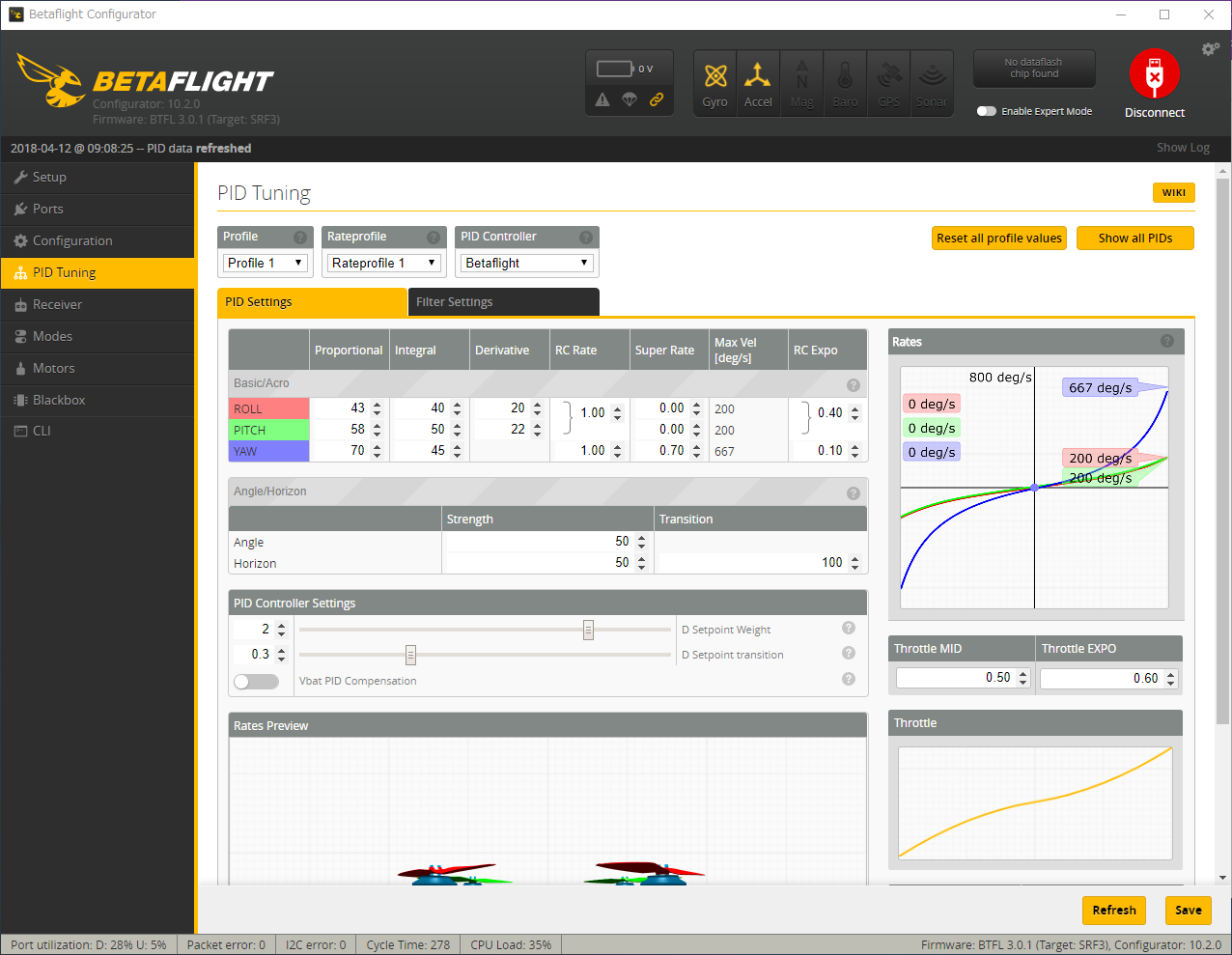
AIR MODEやHORIZONにて本格的に宙返りなどのアクロバットを行う場合には舵の効きを最大にする必要があります。これには送信機の設定とBetaflightの両方を調整します。
Deviation側の設定は以下のYoutubeビデオの2:40から3:20(1-4までで5-GEARからは触らない)までをご覧ください。
How to set up a DSMX receiver in Betaflight and binding to a Devo 10 with Deviation
Betaflightの設定は以下のYoutubeビデオ(ビデオではCleanflightですが)の8:15から13:30を参照してください。
How to Bind Eachine Micro Quad to Spectrum Radio – Binding Micro Quad to DX9, Dx8, Dx6
簡単に書いておくと、BetaflightのReceiverで四つの舵の可動範囲を調べて、それをCLIコマンドのrxrangeに設定すると最大の可動範囲である1000-2000に設定出来ます。わたしの場合、以下のように設定しました。
rxrange 0 1073 1925
rxrange 1 1073 1925
rxrange 2 1073 1925
rxrange 3 1000 1855