BetaFPV 95XフレームにはBetaFPV GoPro Liteを搭載していましたが、かなりpropwashがひどくダイブとまでは言わなくとも機種を下に向けるだけでフラフラしていました。Cinewhoopですし、そういう飛び方をしなければ良いのですが3Sで飛ばしていたumma85よりも飛ばしにくい気がしました。
フリースタイル的に飛ばすためにumma搭載toothpickにすることも考えましたが、まずはumma95を試してみることにしました。umma95は基本的にはCaddx Vistaを載せること以外はumma85と変わりません。独自に変更した部分を中心にかいつまんで書いておきます。

機体スペック
BetaFPV 95X Frame
BetaFPV F4 AIO FC 12A V2
BetaFPV 1106 5000KV
HQProp DP T2.5X2.5X3
TBS Crossfire Nano RX
Caddx Vista
BetaFPV BEC Board half
Naked GoPro Hero6 Black
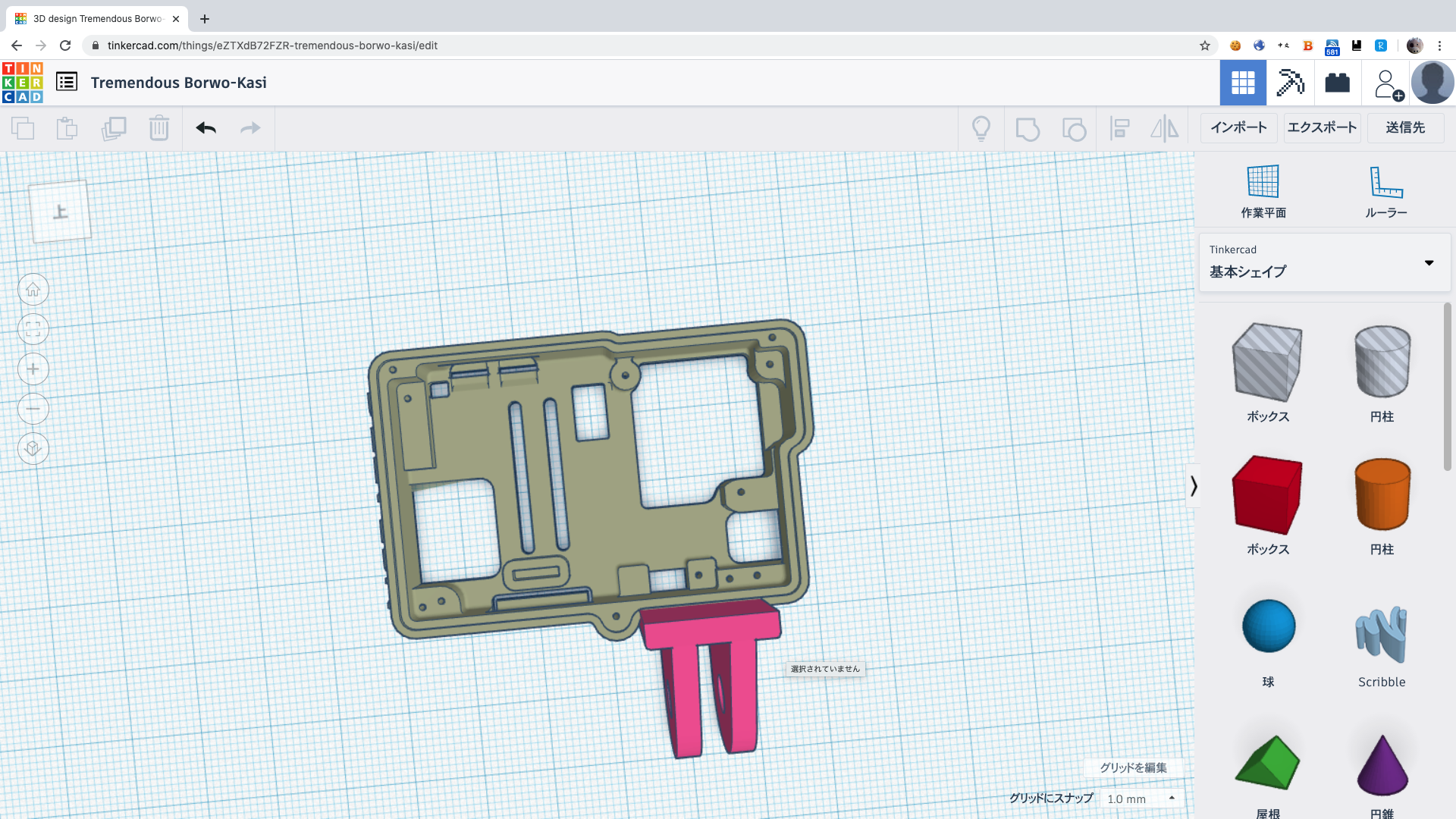
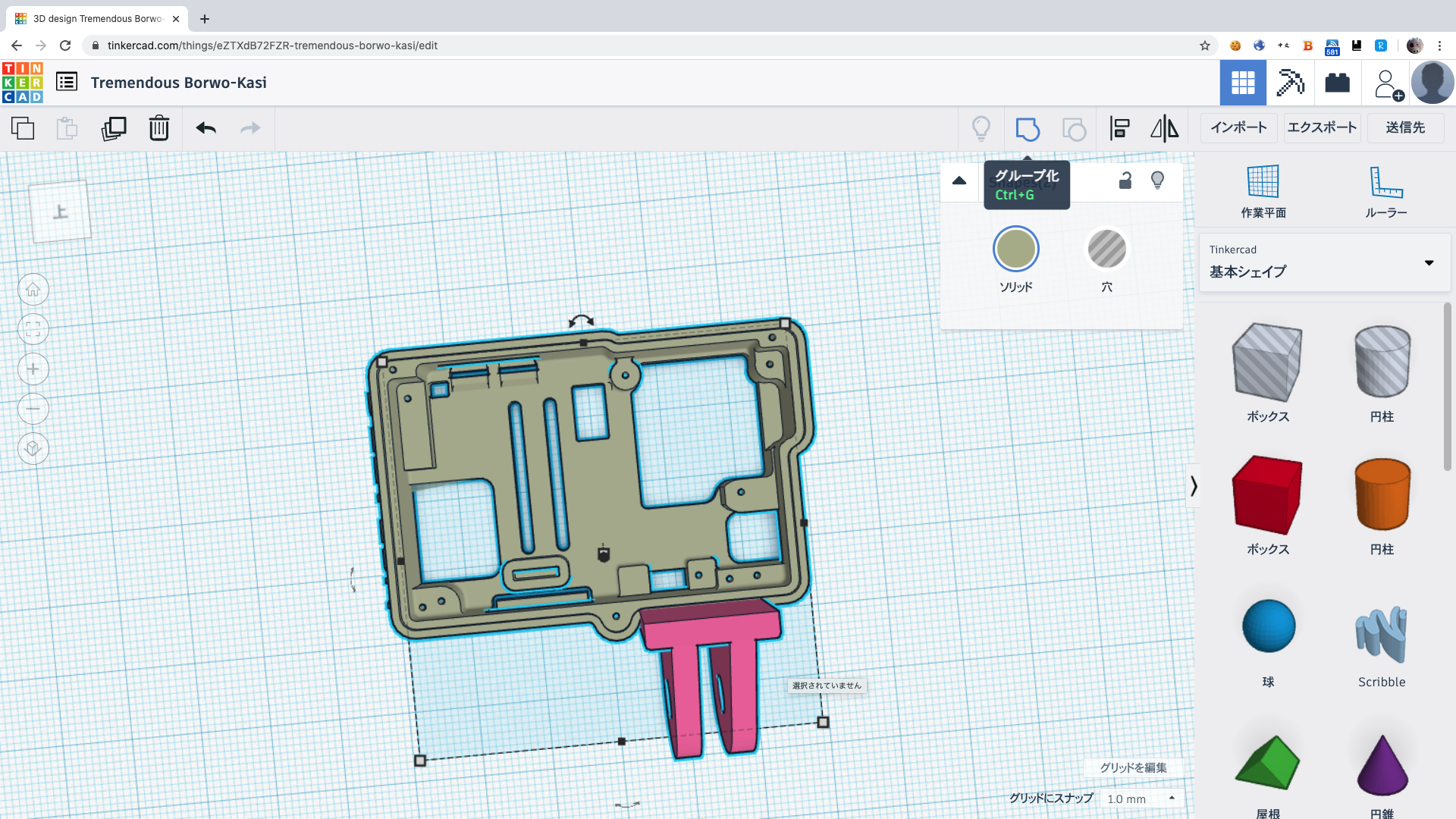
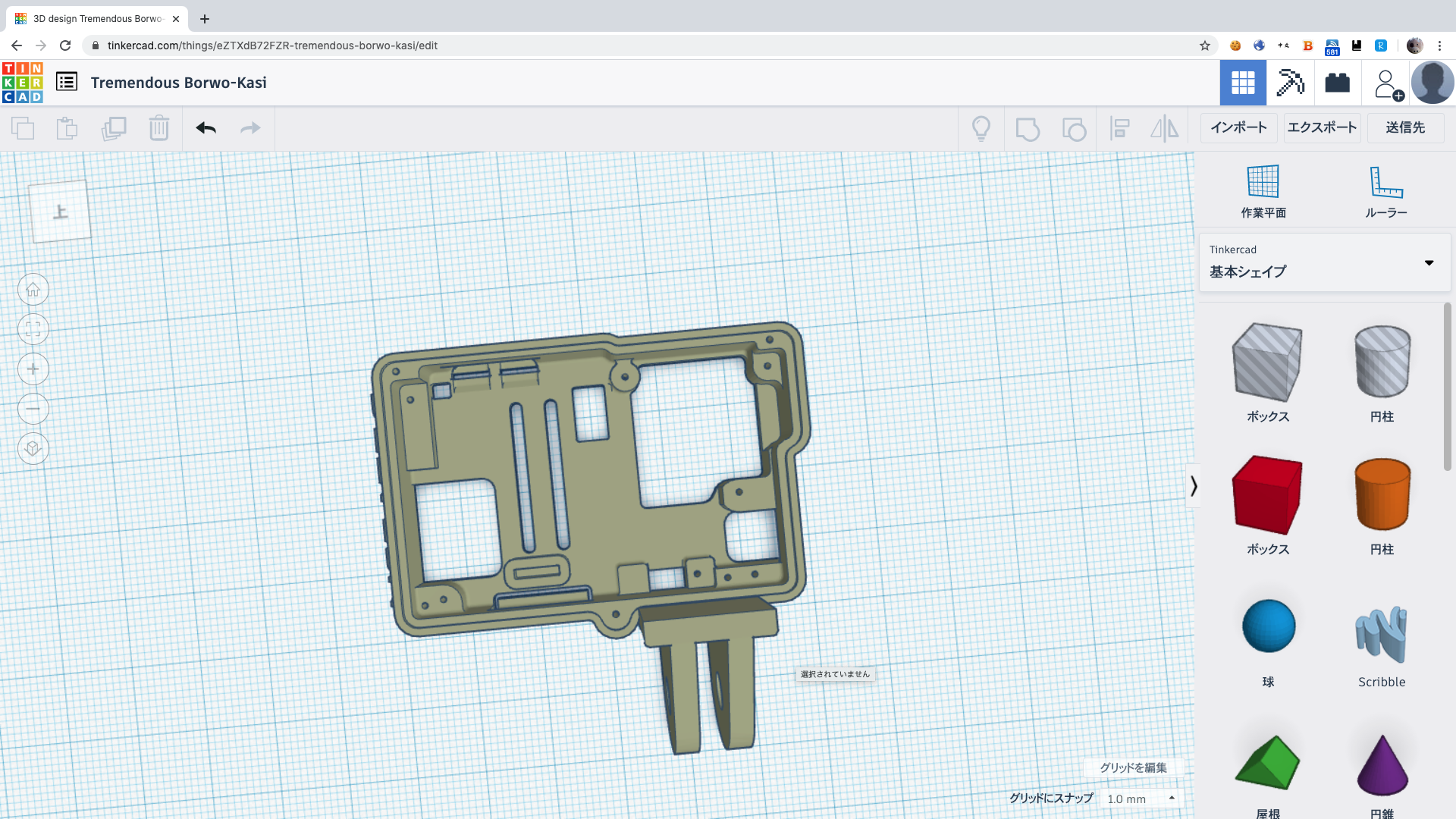
VISTAマウントをオリジナルの垂直から水平に変更した。おそらくTPUなら問題ないのですが、PLAで作ったため、縦置きだとちょっと転んだだけでアンテナマウントが壊れてしまうことへの対応です。既存の造形の合わせ技で作りました。

これはumma95の標準ですが下側はVTXカバーから脚に変わりました。これはハードに着陸しても壊れず安心です。またCrossfireの受信機は、この中に格納しました。
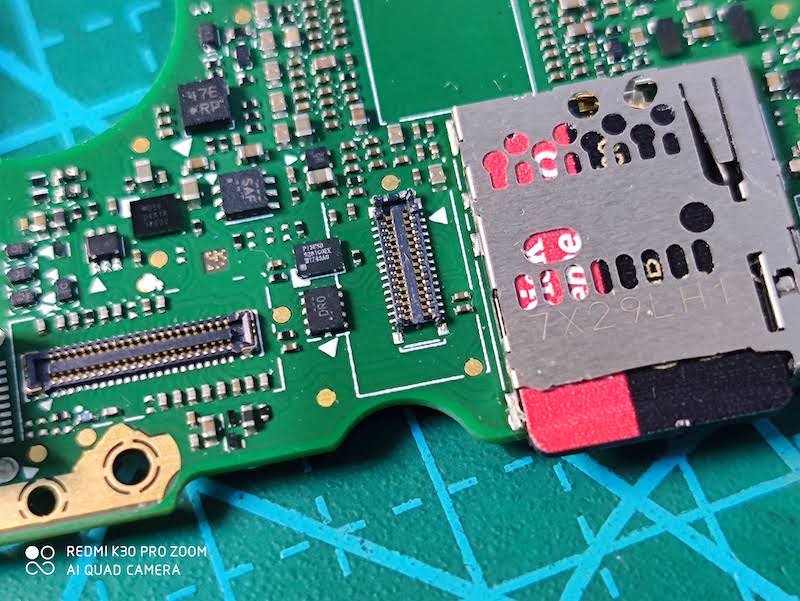
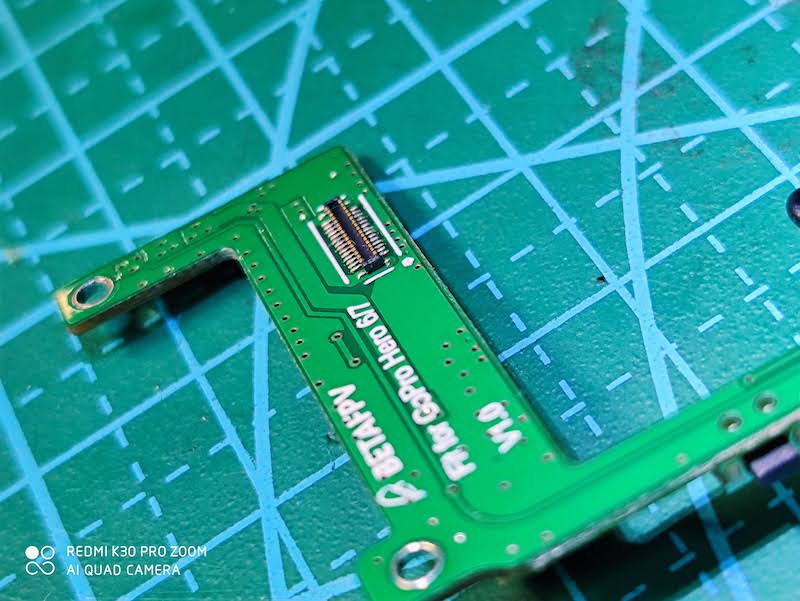
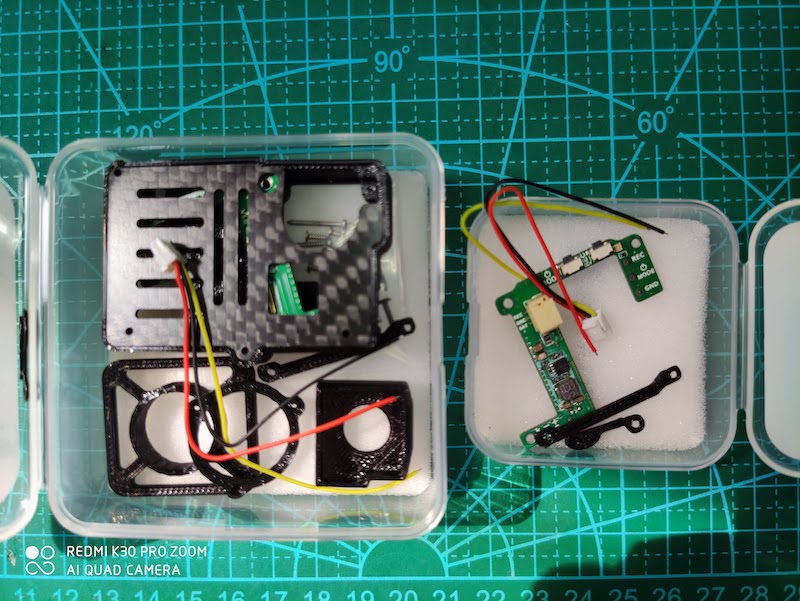
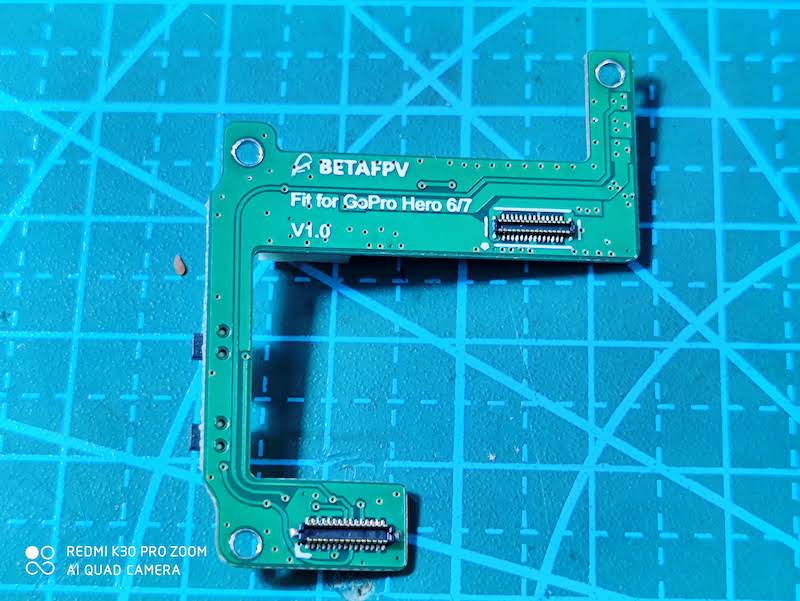
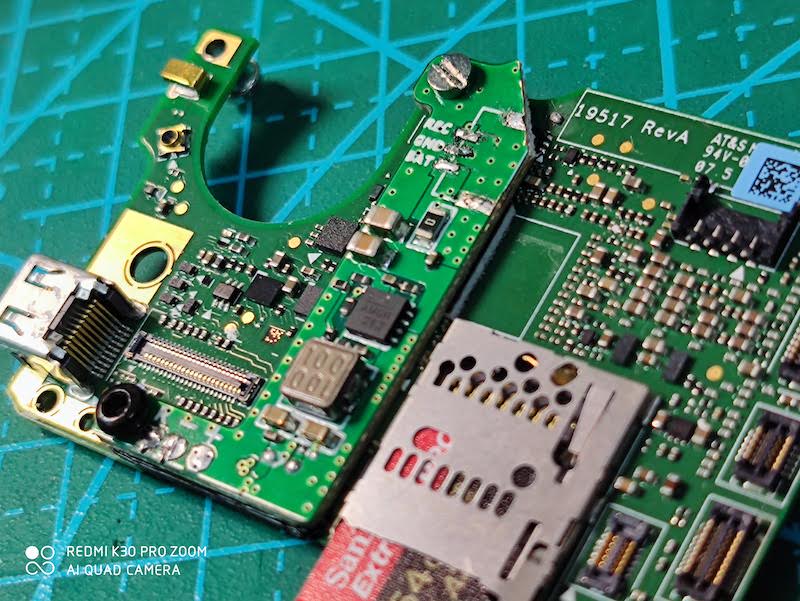
これが一番の変更点ですが、ummaのカーボンプレートを2枚使いGoProボードの保護を図りました。これは以前、操縦不能に陥って墜落した時にGoProボードを物理的に壊したことの対策です。わたしのオリジナルアイデアではなくて、何方かがFacebookで紹介されていた手法です。


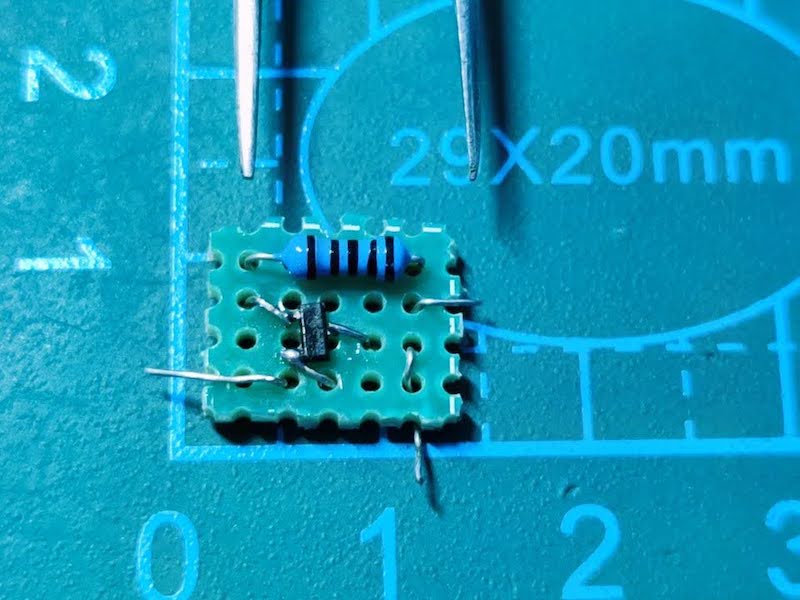
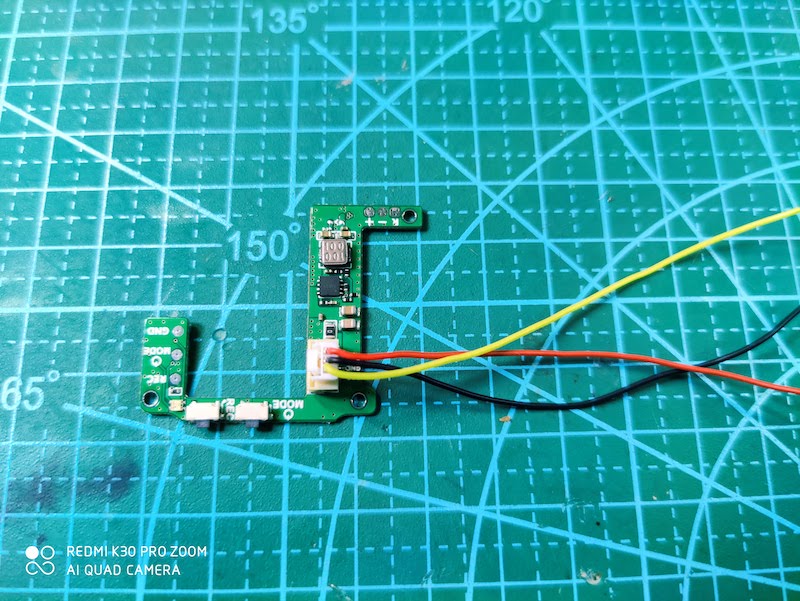
GoProメインボードには半分に切断したBetaFPV BECボードのBEC側を搭載しています。電源としてVBATをBECボードに供給しています。
LED_StripによるGoProコントロールも設定しています。加えてボタンのついたリボンケーブルも接続しています。これは主にはマイクを接続するのが目的です。これによりモーター音の録音と音声コマンドの使用が可能になります。
GoPro Liteを搭載した時はPropwashが酷かったのですが、umma95にしてから嘘のようになくなりました。ロープロファイルな形状が良いのかプッシャーが良いのかはわかりませんが見違えるような飛び方です。
チューニングも軽く行っていますがBetaflight 4.2にHD向けプリセット(4.2 Tuning Notes参照)+RPMフィルターだけで良い感じに飛びました。
フィルタースライダーは、何時ものように少しづつ右に動かしながらテストしました。1.4まで行ったところでfly to the moon(意図せず上昇)になりモーターの加熱が認められました。おそらくは1.1か1.2くらいが安全な感じでした。
まったりとした飛びにしたいのでStick Resposeは0.7にしました。ややbounce backが感じられたのでPDバランスを1.1にしてみましたが、戻してみてもbaounce back自体がなかなか確認出来なくなったので良くなかったかどうかは良くわかりません。propwashも少しだけ残っているのでPIDはもう少し追求していく余地があるかも知れません。Cinewhoop的な飛ばし方をする分には、このままでまったく問題はありません。
まだチューニングの途中ですが、まったりとしたフリースタイルがこなせる機体になりました。