2つの事柄について語ってみます。ひとつ目はGoProによる電波障害による墜落、ふたつ目はその墜落によるGoProメインボード破壊です。
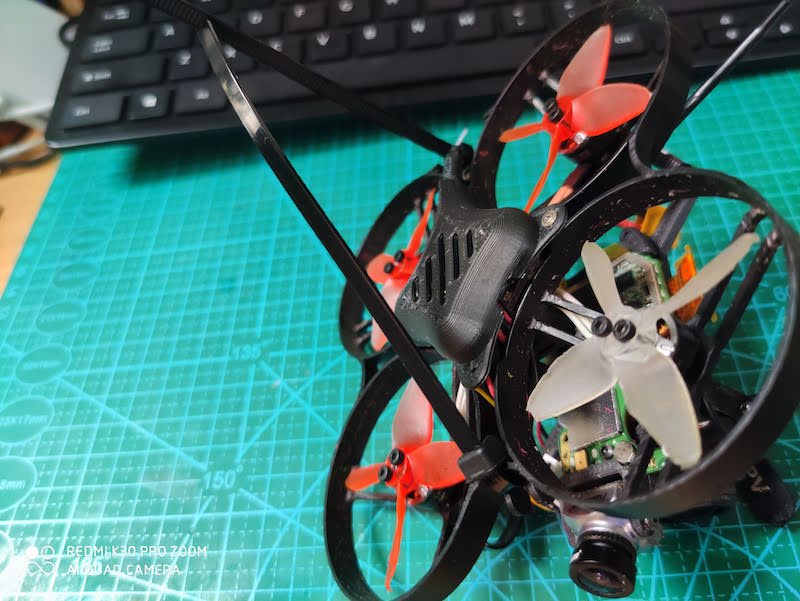
わたしのumma85で不可解な墜落を2回経験しました。BlackBoxが無いので確実なことは言えませんが受信機が電波を失ってfailsafeに入ったように思えます。ひとつ確実なのは100mくらいの距離でもRSSIがかなり落ち込む状態であったことです。
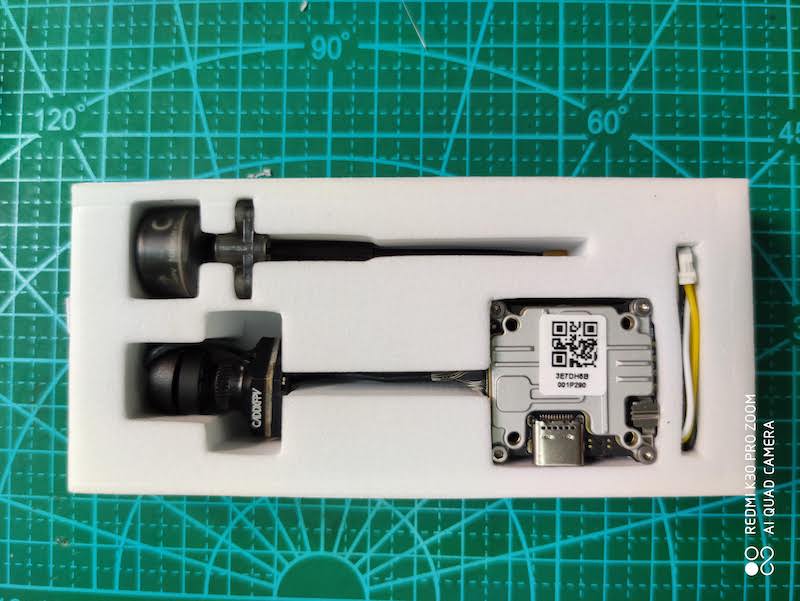
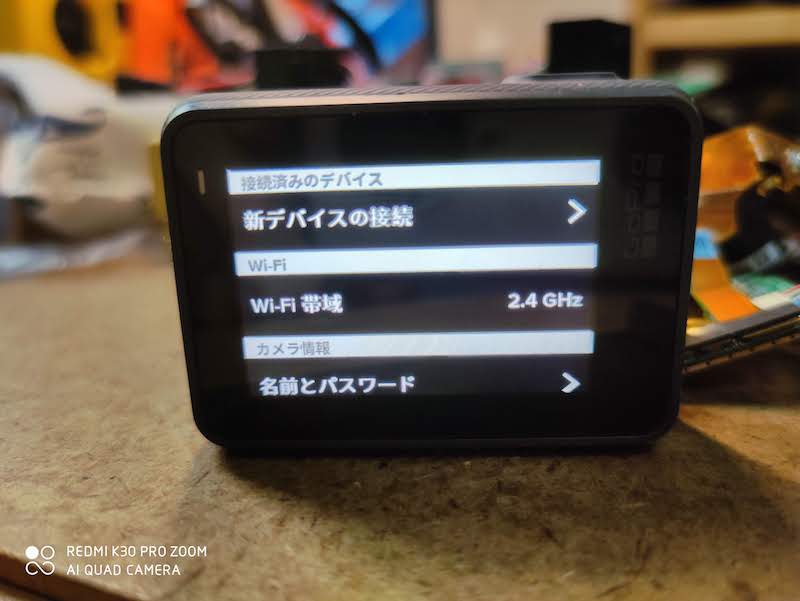
– GoPro Hero6のWiFiは2.4GHzでオンのまま使用。(5.8GHzはVTXとぶつかるかもしれないので避けていた)
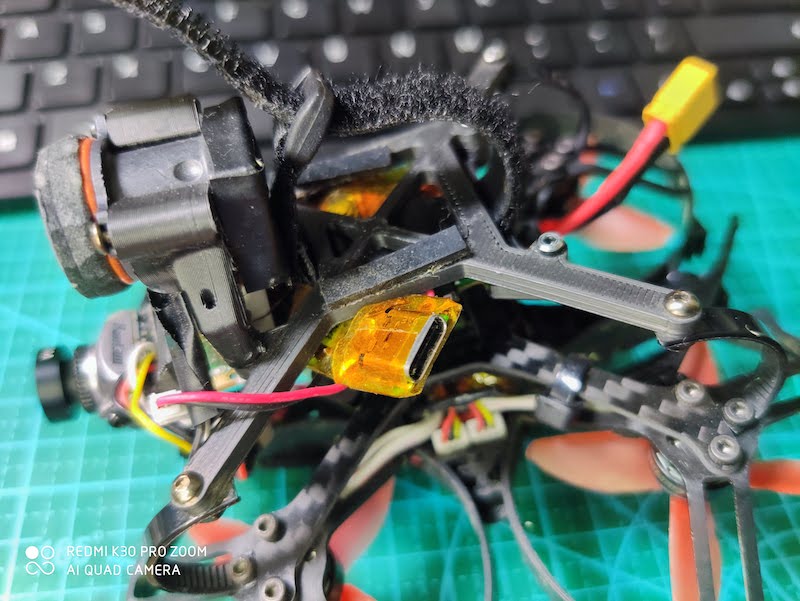
– 受信機はXM+でFCの上、GoProメインボードとの間に設置。
最初の墜落の後で簡単な実験を行いました。室内にてGoProの電源オフとオンで飛ばしてみてRSSIを見ていると明らかに違いました。GoProをオフにすると室内ではRSSIが90を切ることはまったくありませんでしたが、GoProの電源をオンにすると80を切ることもありました。
ここまで分かっていながら近距離ならばと飛ばしていて2回目の墜落になりました。その時にGoProのメインボードが壊れてしまい電源が上がらなくなったので、この問題の実践的追求は出来ていませんが考えうる対策を列挙してみたいと思います。
– 2.4GHzをやめて900MHzシステムに移行する。日本では難しいですが、海外ならばかなり有効な手段かも。わたしも墜落後にTBS Tango2が到着したので屋外機はすべてCrossfireに移行するところなので、この回避策を試すことになります。
– GoProのWiFiをオフにする。もしWiFiが干渉しているのであれば、これで根本原因を取り除くことができます。わたしは、ほぼGoProの設定を変更しないのでこの方法も悪くはないかもしれません。
– FaceBookに書かれていたことですが、剥き出しのGoProボードはWiFiに関わらず電波干渉を起こすので受信機やアンテナの位置を調整すべしとの事です。これは一理あります。WiFi電波の干渉にしても受信機やアンテナの設置方法で影響を小さくすることが出来るかも知れません。かなり多くの人が問題なく飛ばしているようですし、これも有力な回避策かも知れません。おそらくRSSIの数値を見ながら調整すれば良いので割と簡単に出来そうです。
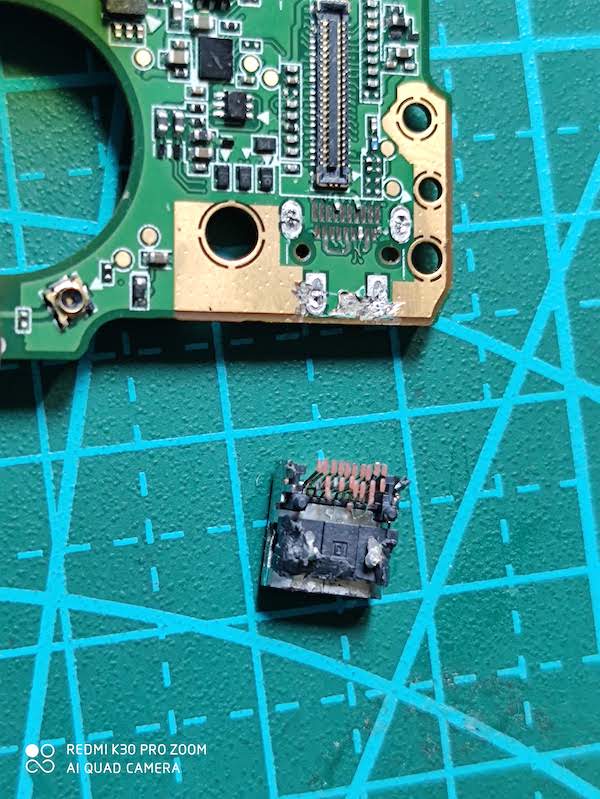
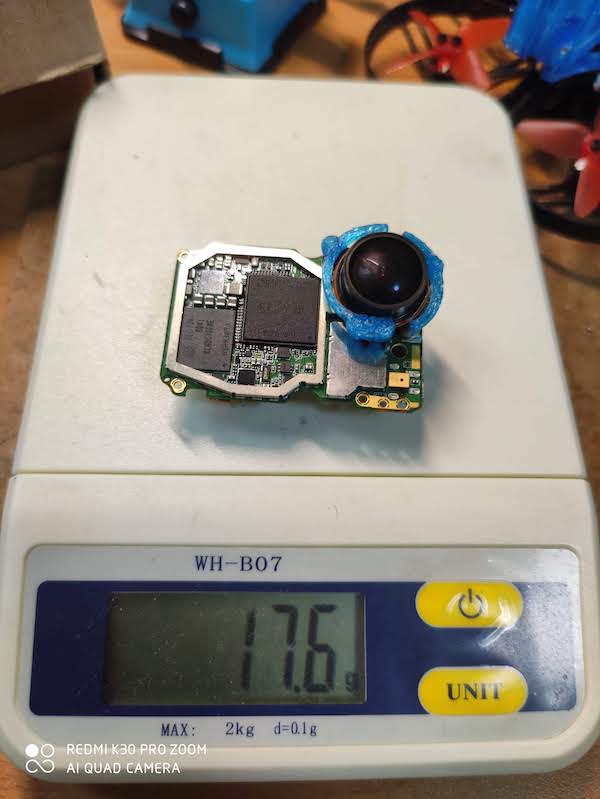
2回目の墜落でGoProの電源が上がらなくなりました。
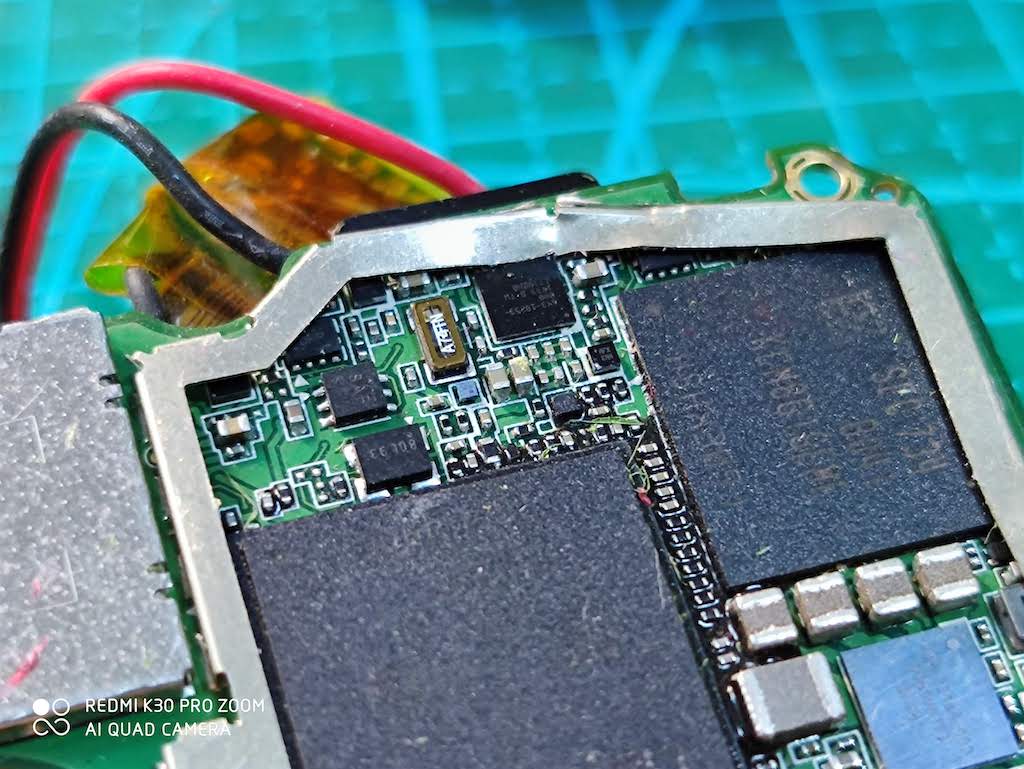
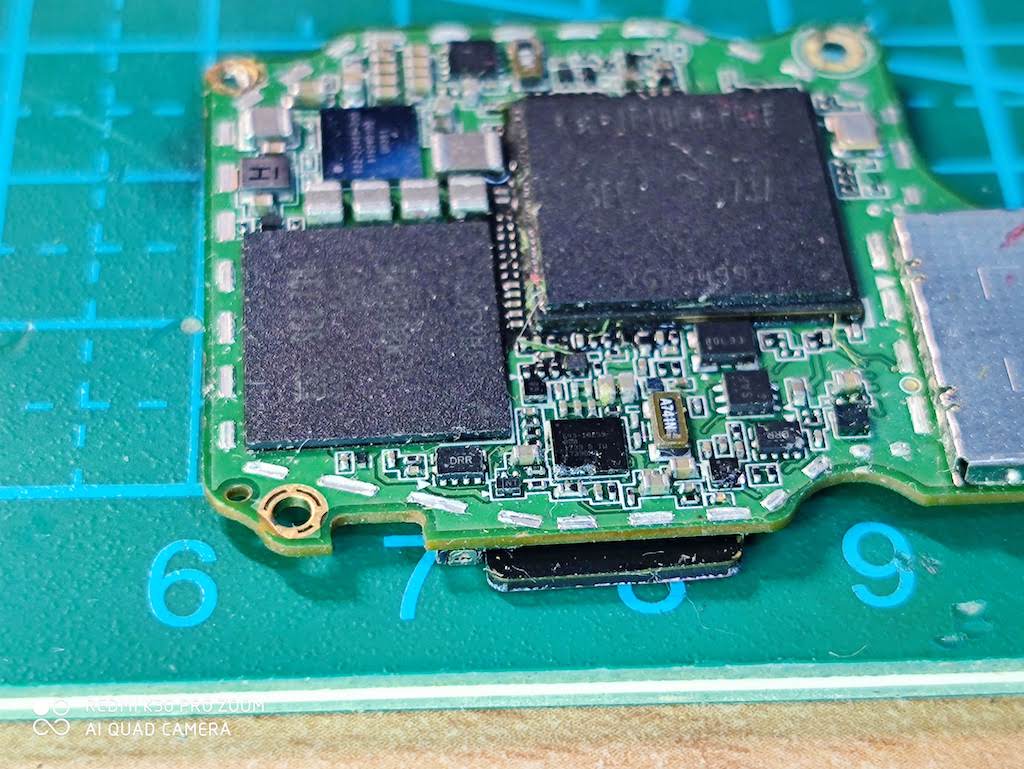
シールドの一部がメインボードにありますが、これが機体のどこかに当たって凹んでいます。これを取り除いてみると下のチップが欠けていました。これはレアケースかも知れませんが、次に組み立てる時は何かしら対策を取りたいと考えています。おそらくは以下の対策のどれか、もしくは組み合わせになると思います。
– シールドのレールを取り除いてしまう。
– シールドが落ち込んでチップを傷つけないように、ところどころに詰め物をする。
– 墜落でumma85の上部構造が落ち込んだ時にGoProメインボードが機体フレームに直接当たらないようにどこかにバンパーを設置する。
ただいまBetaFPV GoProLite+Caddx Nebula+95Xに取り組んでいるのでumma85の復活が何時になるかは不明で、これらの対策が実践的にどうなるのかは現時点ではわかりません。