おそらくは積極的なリークにより、DJIのFPVドローンの写真が少し前から出回っていましたが、ついにFCC IDのサイトで資料が公開されました。製品としての詳細が分かるわけではありませんが興味深いことが沢山あるので、すこしまとめておきます。
FCCID.IO のサイトによると認証申請されたのは3製品です。
DJI FPV DroneSS3-FD1W4K2006
DJI FPV Googles V2SS3-FGDB282006
DJI FPV Remote Controller 2SS3-FC7BGC2006
それぞれ技適番号がありますが、添付されていたラベルに書かれていたもので、現在(2020/12/09)のところ総務省のサイトでは見つけることは出来ません。
興味深いのは技適番号があることに加えて2.4GHzと5.8GHzのデュアルバンドであることです。まるでDJI Mavicのようです。技適の詳細は分かりませんが、電波法的にはMavicなどと同様に無線の免許無しに扱える可能性が見えてきました。
すでにリーク写真もありますが、一部のドキュメントに製品の形状が垣間見えます。ゴーグル はリンク先の31ページからです。現行のゴーグルにとても似ています。送信機 はリンク先の29ページです。なんだかTBS Tango2のような感じです。小型で好感がもてます。
さて最大の懸念事項はAirUnitが無いことです。現在のDJI Digital FPV SystemではAirUnitという装置を任意のドローンに搭載してVTX(+受信機)として使用するのですが、それがありません。代わりにドローン自体が登録されています。これは現在のFPVドローンとは別物と言えるでしょう。
おそらくDJIの狙いはFPVでの撮影需要を狙った機体まで含めた完成されたシステムということなのでしょう。それも十分に興味深いです。
ゴーグルの名称はDJI FPV Googles V2となっているので現行DJI Digital FPV Systemへの後方互換性はあるのかもしれません。願わくば対応する2.4GHzでも使えるAirUnitを出して欲しいです。
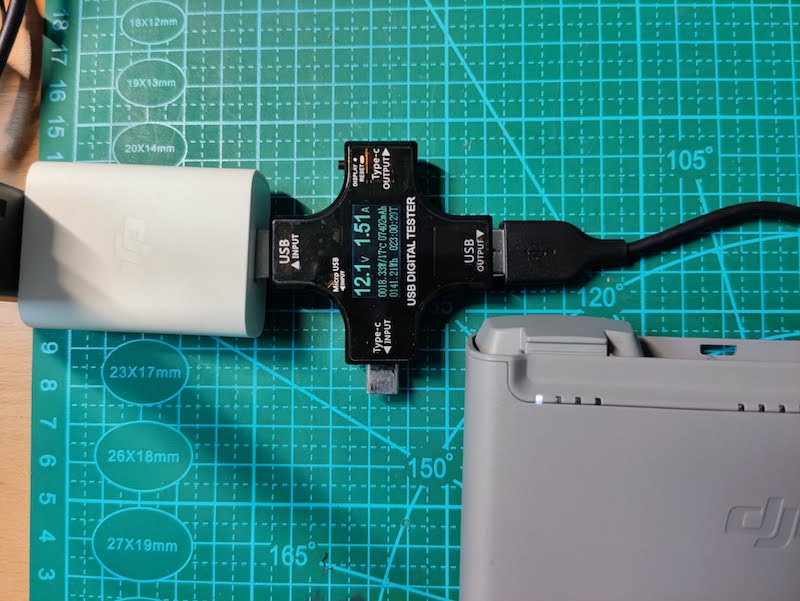
DJI Mini2の充電アダプターはUSB-Cで出力され定格出力は18Wで電圧と電流の組み合わせをみると12V/1.5A, 9V/2A, 5V/3Aになっています。携帯電話で言うところの急速充電を行っています。急速充電の規格は分かりませんが手持ちの充電器でどんな具合で充電されるかを計器を用いて調べてみます。
[ DJI Mini2 純正充電アダプター ]
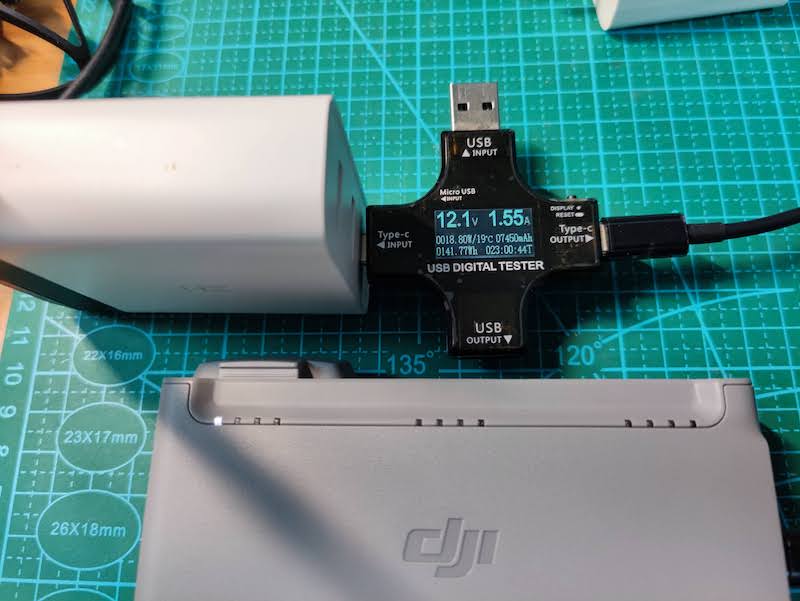
[ ZMI USB 65W ]
[ ANKER PowerPort Speed 5 ]
今回のテストには使用していませんが、携帯電話の充電器でも12V 2AでDJI Mini2を充電出来るものがありました。
[ 小米移動電源3 20000mAh 高配版 ]
引き続きモバイルバッテリーの容量が足りるのかどうかについても検証しました。私のDJI Mini2は海外版ですので、これから書くことはそのまま日本で販売されているDJI Mini2には当てはまりません。
まずは計算です。この20000mAhという容量はスペック表によると3.7Vで計算したものです。また実効容量は12600mAh(5V 5.4A)とも書かれています。それぞれ電力値に直すと74Whと63Whになります。一方、DJI Mini2のバッテリーのスペック表には2250mAh,標準電圧7.7V,LiPo 2S,電力量17.32Whと書かれています。電力でちゃんと書かれていますので、すなおにそれをモバイルバッテリーのものと比べれてみると三本のバッテリーで合計17.32×3=51.96Whになります。効率がいくら悪いとしても63Whあれば足りそうな気がします。
実際に充電できるかどうか試してみました。バッテリーは実際にDJI Mini2をホバリング状態にして残り飛行時間5分になりLow Batteryのアラームが出るところまで消費させた三本のバッテリー(海外仕様)を使用しました。Fly More Comboのバッテリー充電器を小米の20000mAhモバイルバッテリーに接続して三本のバッテリーが完全に充電されることを確認しました。小米のモバイルバッテリーにはバッテリー残量を示すLEDが4個付いています。そのLEDは2個点灯していました。これが本当に半分の容量を残しているわけでは無い気がします。おそらくは1/4から1/2の間ではないかと推測します。試してはいませんが更にもう一本のDJI Mini2バッテリーくらいは充電出来そうな気がします。
日本版のDJI Mini2のバッテリーは8.09Whとの事ですので10000mAhのモバイルバッテリーでも大丈夫な気がします。
難しい話ではありません。DJI Mini2などではパノラマ写真を撮影すると自動的に何枚もの写真を撮影します。それをDJI Flyは上手に合成してくれます。パノラマ写真にいくつか種類がありますが、その中のスフィアというのもので撮影すると360度全周(ジンバルが向けられない天頂を除き)くまなく撮影されます。
その360度写真をDJI Flyは撮影されていない天頂部分を空の色で上手に補完した4096×2048ピクセルの画像にしてくれます。(縦横比が2:1になっていることが重要です。理由を考えてみるのも面白いですよ。)
携帯電話の写真として眺めるとただの一枚の写真でしかありません。これをRicho THETAのためのアプリケーションに読み込むとVR画像として楽しむことができます。簡単に言うとパノラマ撮影を行ったドローンの位置に自分が居て、そこで携帯電話を向けた方向の画像が動的に見えるようになります。携帯電話だけでも、そこそこ楽しむ事が出来ますが、安価な携帯電話をはめ込む形のVRゴーグルを使用すると驚くほどの没入感が得られます。もしVR未体験でしたら、ぜひともGoggleカードボード(一番下にアマゾンリンクを貼っています)の様な格安品で良いので、この際にお試しいただきたいと思います。静止画ですが、なるほどVRとはこういうことかと納得できます。
THETAアプリケーションの使用方法はiPhoneでもAndroidでも特別難しくはありません。とりあえずTHETAアプリケーションを導入して適当に触っていくだけでも大丈夫ではあります。
いちおう、Androidでのスクリーンショットをいくつか貼って説明しておきます。写真の選び方などは機種によって違うと思います。
THETAとTHETA+というアプリケーションがありますが、ここで使用するのはTHETAの方です。
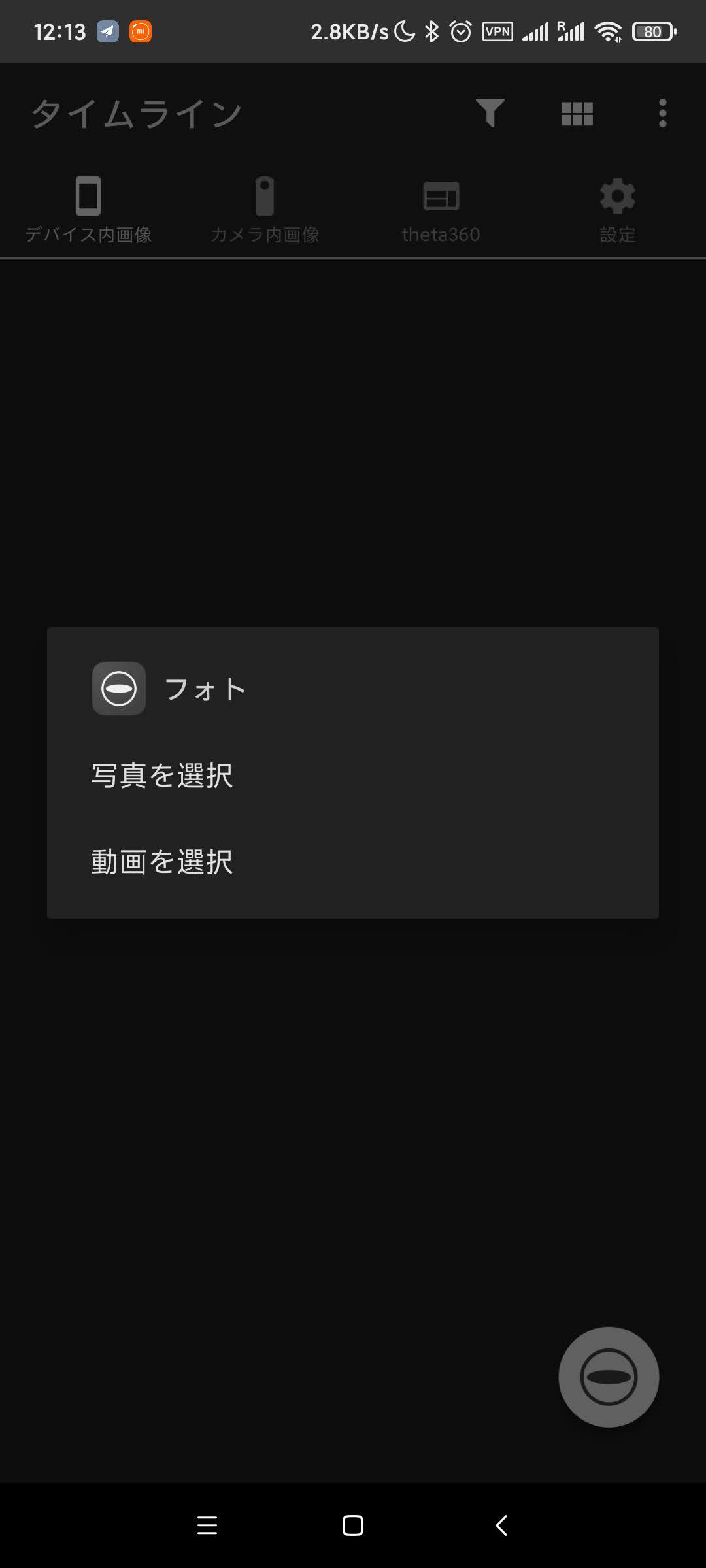
右上の三点ドットをタップします。
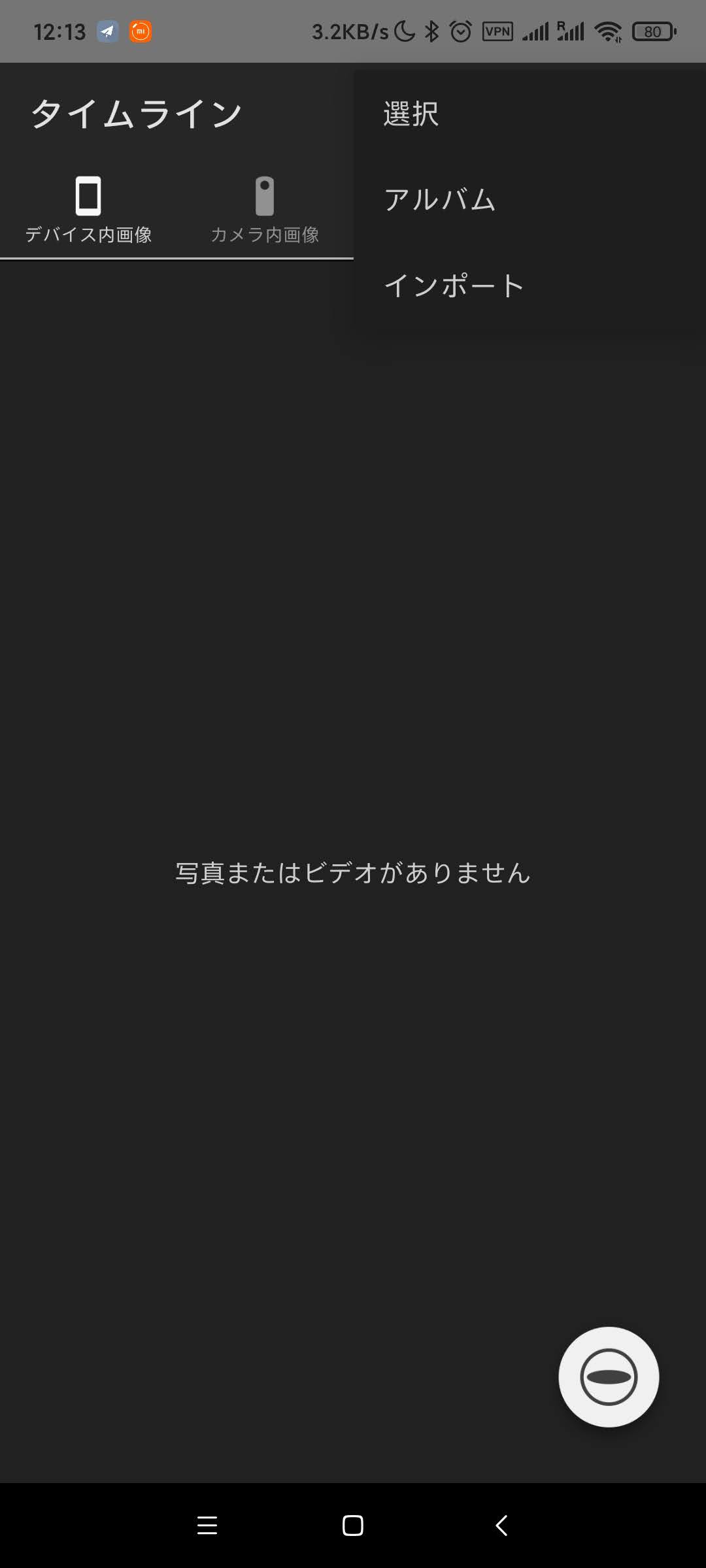
メニューからアルバムを選びます。
写真を選択をタップします。
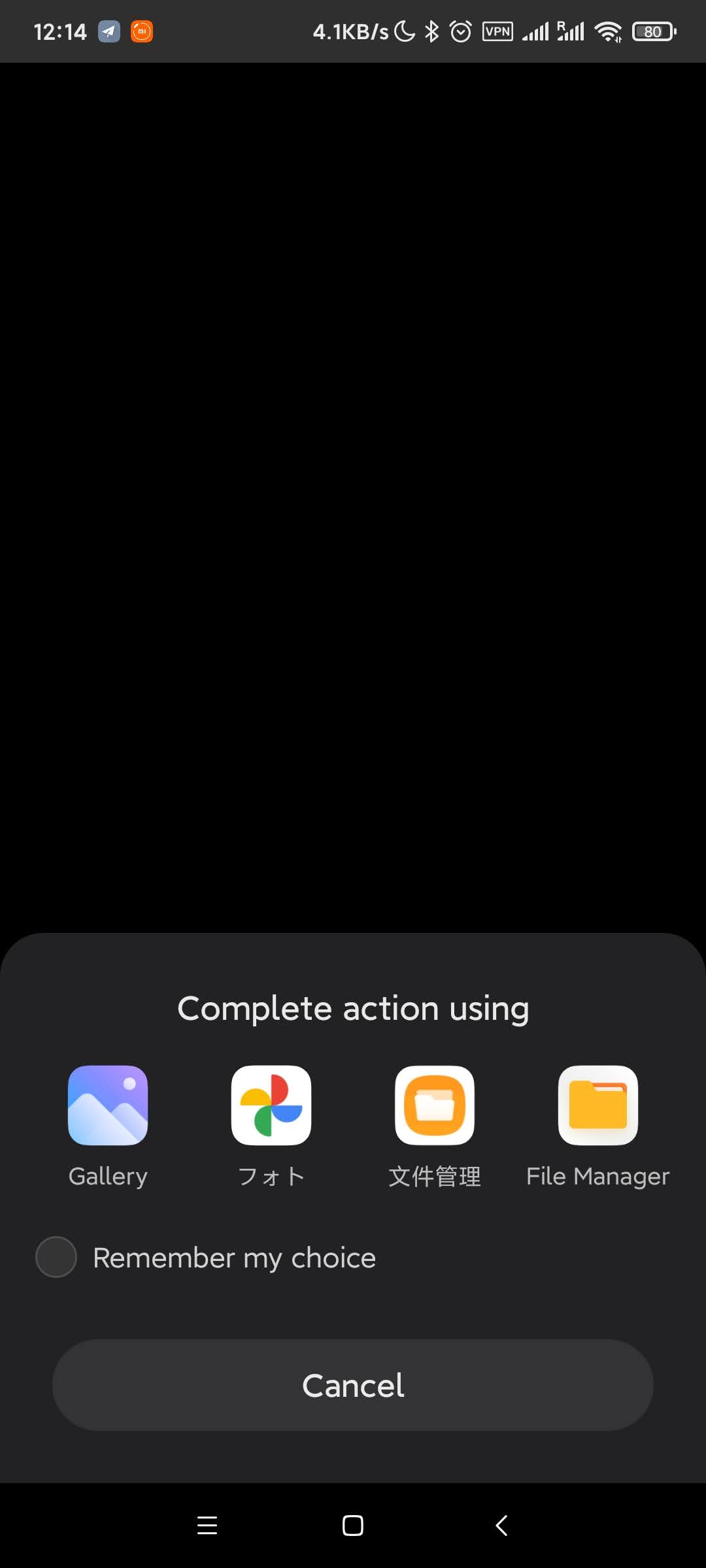
わたしの場合Galleryを選びます。
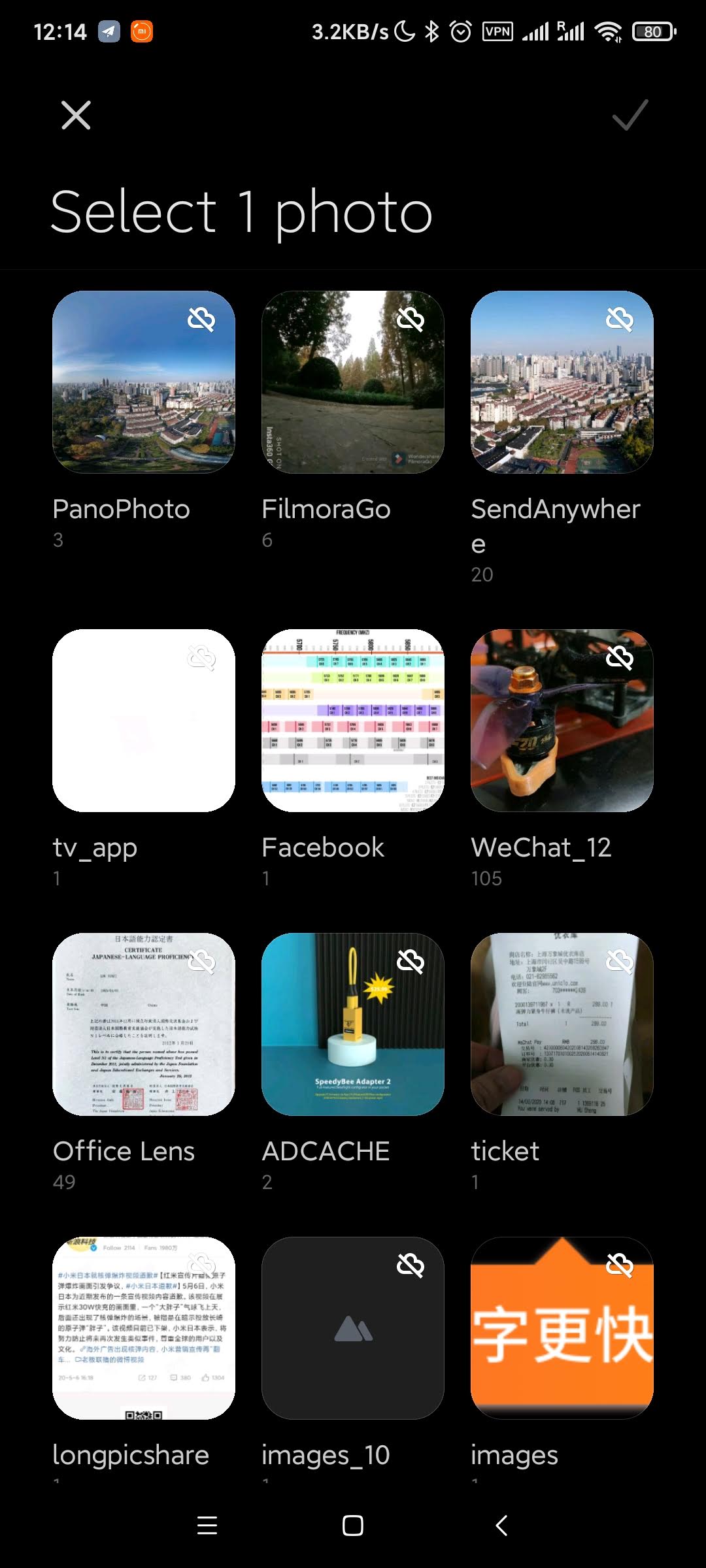
アルバム「PanoPhoto」をタップします。
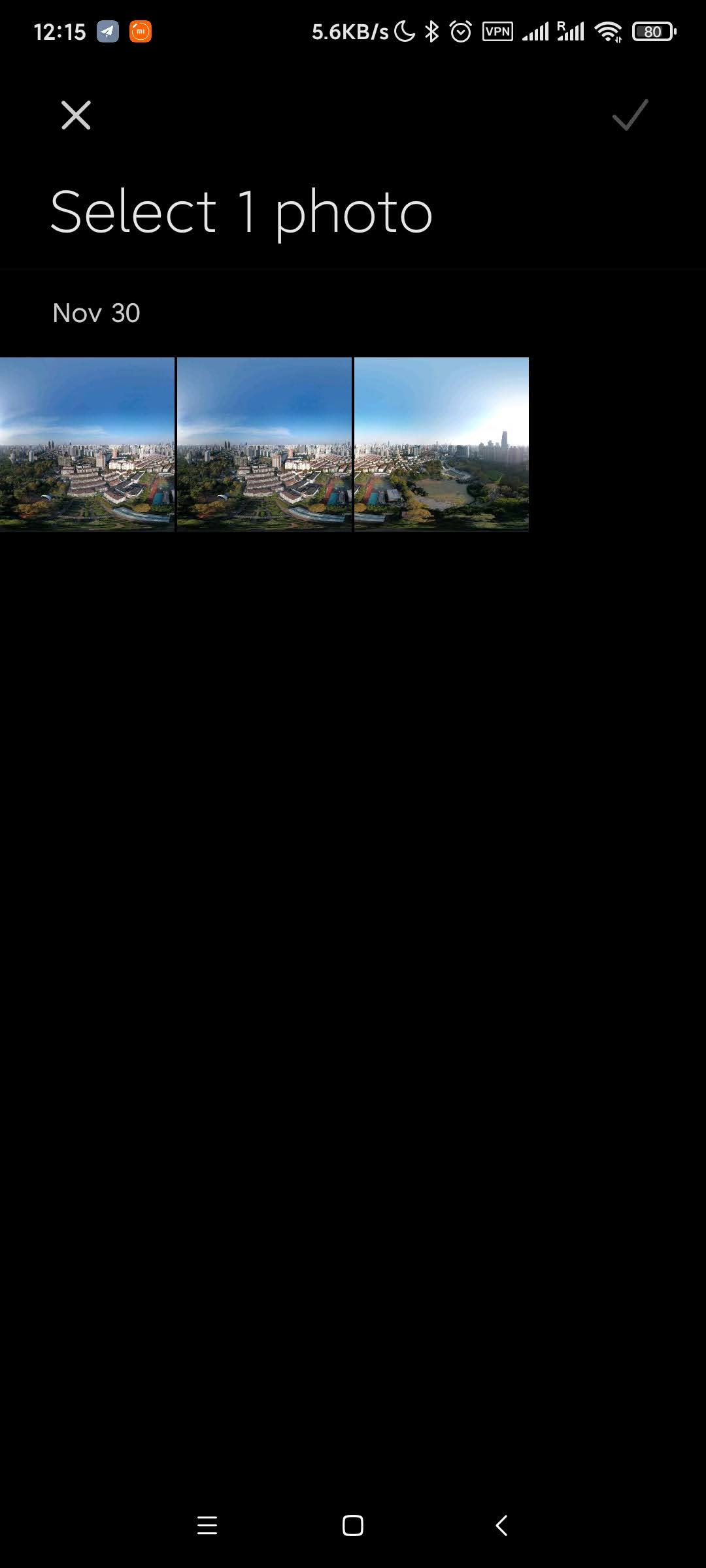
パノラマ写真をひとつ選びます。
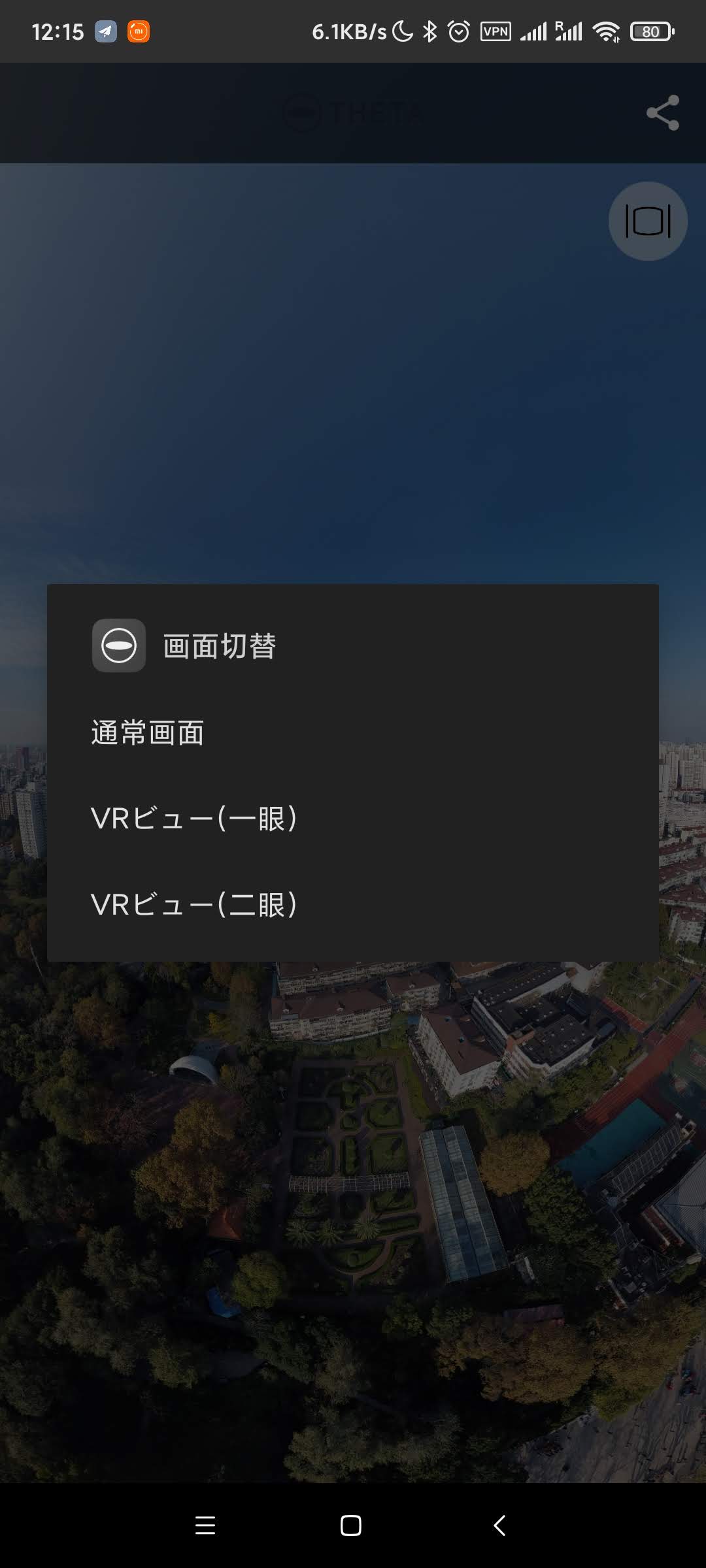
写真が表示されますが、このままではVRモードになっていません。右上の”|□|”アイコンをタップします。
二眼式ゴーグルを使用する場合はVRビュー(二眼)、携帯電話単体で楽しむにVRビュー(一眼)を選択します。
Mavic Miniに搭載されていなくて、とても残念な思いをしていたパノラマ写真の撮影がDJI Mini2で可能になりました。さっそく一番試してみたかったスフィア、360度写真を撮って来ました。
比較対象がSparkなのは容赦いただきたいですが、その差は大きかったです。Sparkでは46枚の写真を100秒ほどかけて撮影します。mimi2は26枚の写真を47秒ほどで撮影します。撮影時間が短いのはありがたいです。
Sparkで試していた頃のDJI GO4はパノラマ写真を自動的に合成してはくれますが出来が今ひとつでした。そのためPCにすべての写真を転送しMicrosoft ICEで合成するしかありませんでした。現在のDJI Flyはかなり上手くパノラマ写真を合成してくれます。ただし解像度は4096×2048なので元の26枚の写真を上手に合成した場合に比べるとだいぶ劣ります。しかしながら360度写真としてFacebookにアップロードする分には十分であると思います。
より高解像度のパノラマ写真が必要な場合はSparkの時に書いた手順が使えますので以下のリンクをご覧ください。
DJI Spark スフィア�撮影(360度パノラマ)したものをVR化する
さて、ここからが本題です。DJI Flyが作り出した360度パノラマ写真は、そのままRicho Thetaのアプリなどに取り込んで携帯電話上でVR的に楽しんだり編集することが可能です。ところがFacebookにアップロードするとただの四角い写真にしかなりません。FacebookにVR写真として認識させるためには写真ファイルの属性情報であるexifの中でRicho Thetaで撮影した写真であると偽ることが必要になります。これを携帯電話上で行うというのが、この記事の主旨です。
追加情報:
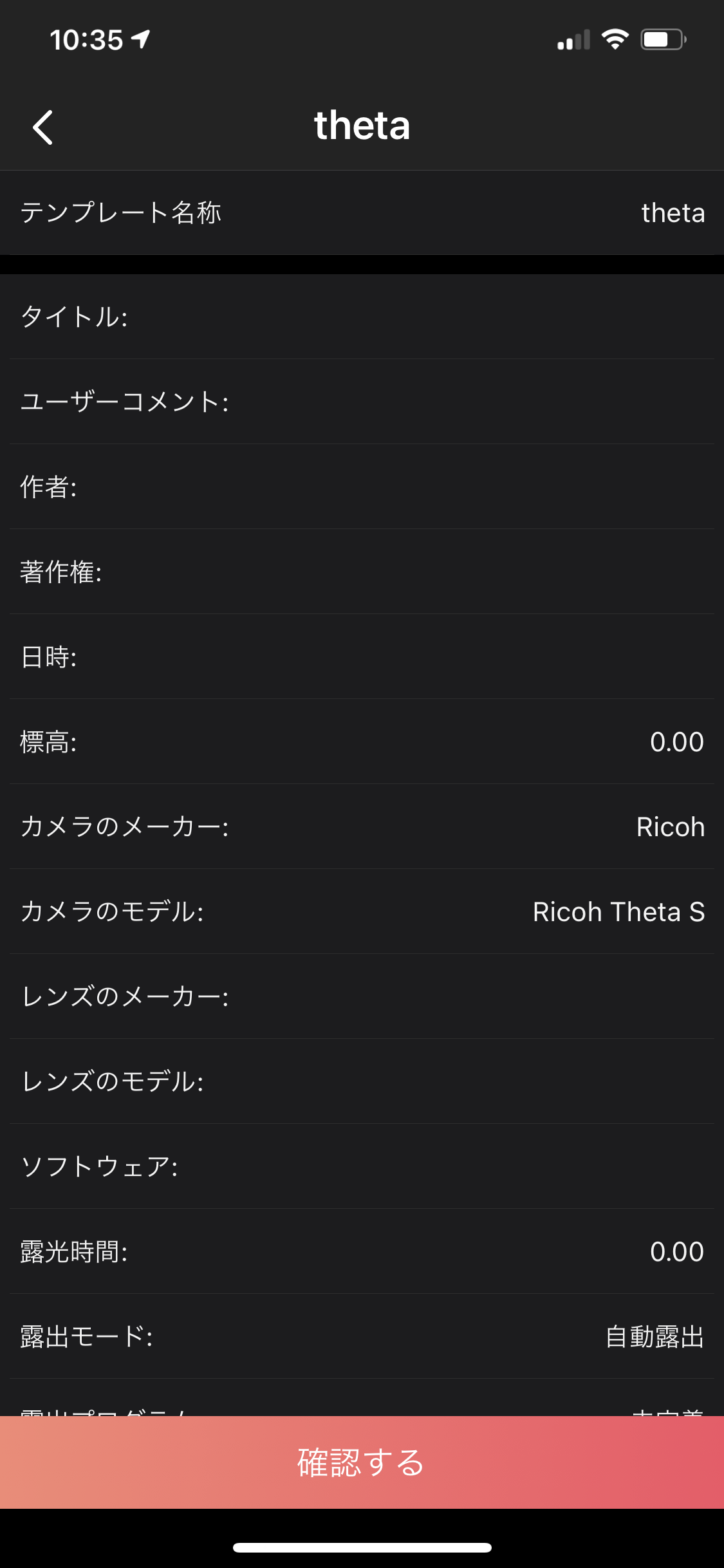
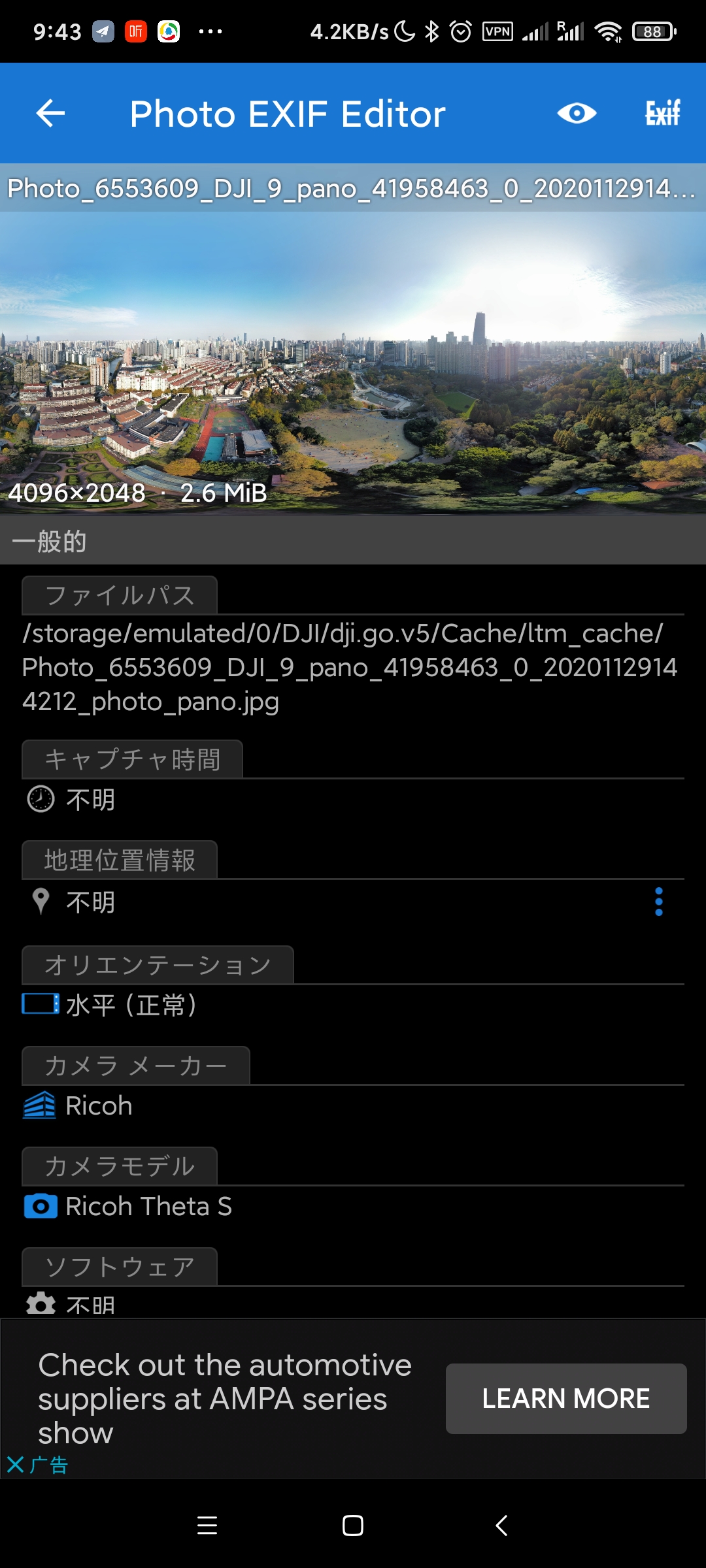
必要なのはexif情報としてMakeに”Ricoh”、Modelに”Ricoh Theta S”と書き込むことです。それを可能にする携帯電話アプリケーションを探せば携帯電話だけで作業を完了することが出来ます。他にもっと良いものがあるかもしれませんが、私が見つけた無料アプリを紹介しておきます。
[ iPhoneアプリケーション ] EXIFマスター というアプリケーションです。下のようなテンプレートを設定しておくとワンタッチで必要な情報をセット出来ます。ただし時々広告ビデオを見なければなりません。課金すると広告を出ないように出来るようですが試してはいません。
[ Androidアプリケーション ] Photo EXIF Editor とPower Exif-Photo Exif Viewer です。使い方はとても簡単なので、あらためてここで紹介する必要もないでしょう。スクリーンショットだけ下に貼り付けておきます。
[ サンブル投稿 ] MSICEで作成した10000×5000ピクセルのパノラマ写真 iPhoneのDJI Flyが作成した4096×2048ピクセルのパノラマ写真
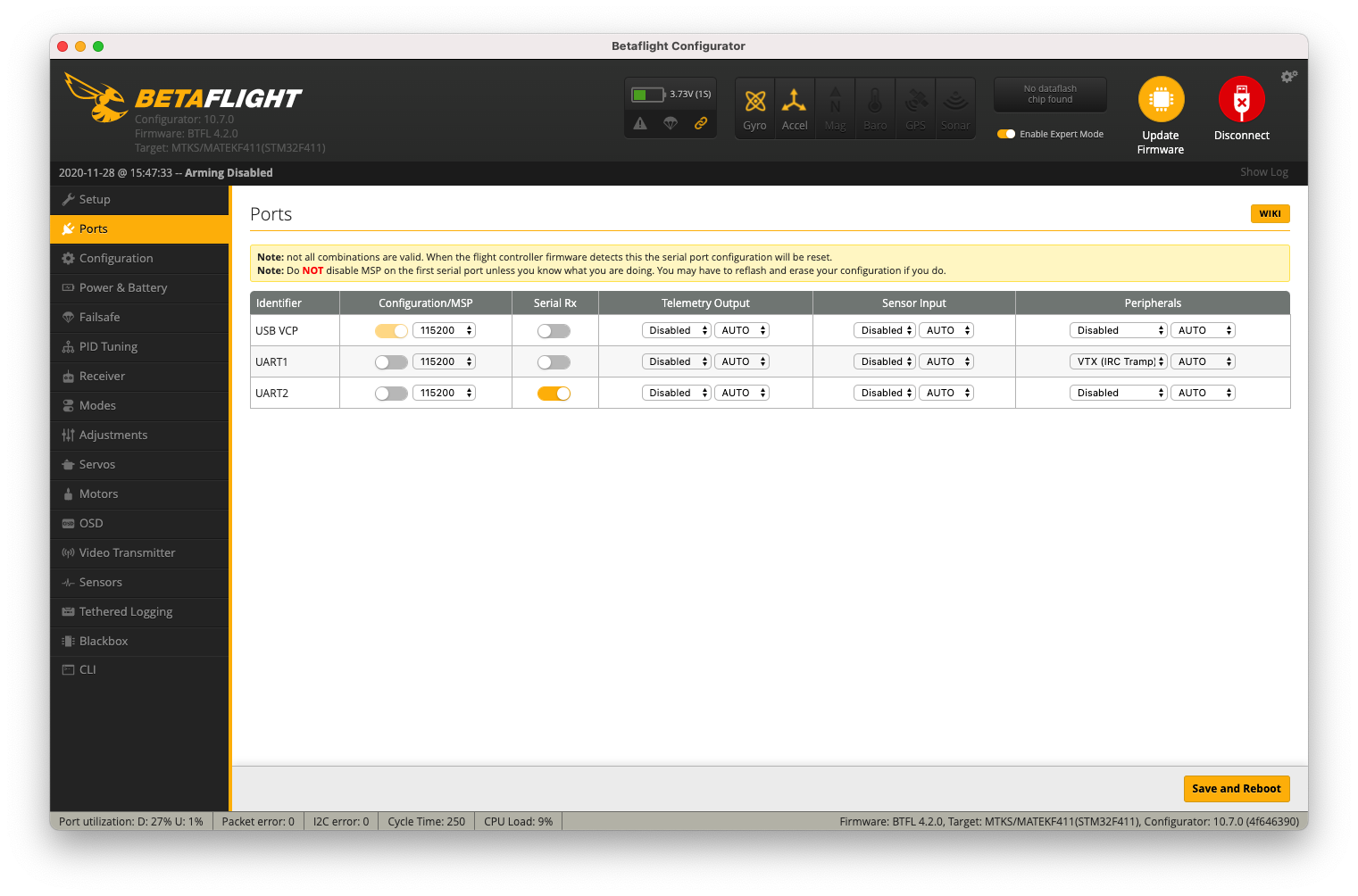
機体の設定をDump/Diffのテキストファイルから読み解きたいことがまれにあります。大部分は意味のある文字列が書いてありますし、受信機の種類などは記憶していたりするので良いのですがConfiguratorのPortページのデータが曲者です。どのUARTが受信機だったとか、VTXのプロトコルがIRC TrampだったかSmartAudioだったとか重要な項目ですが、記憶するのは難しいですしDump/Diffデータも意味不明の数字でしかありません。ということで、これについて調べたことを書いておきます。タイトルはSerial編として続きがあるように見えますが、次に何かDump/Diffで困ったことが見つからない限り書く予定はありません。
上はとある機体のPortsタブです。これに対応するDumpデータは以下のようになっています。# serial
最初のserial 20で始まる行はdiffの出力には現れません。これはUSB VCPに相当すると容易に想像が付きます。またserial 0がUART1でserial 1であるというのもほぼ確信を持って言えるでしょう。それに続く数値もPortsタブの設定を変化させて探っていけば自分が必要な項目は拾い出せるとは思いますが、今ひとつスマートではありませんし確信を持って語ることは出来ません。
正しい情報を得るべくソースコードを読んで探していたのですが、結局ドキュメントにまとめて書かれていることが分かりました。ということでbetaflight/docs/Serial.md を読んでいただければ全ては解明します。
それだけではつれないので簡単に説明を加えておきます。serialに続く最初の数字がポートでUART番号から1を引いたものです。またUSBは20、softserialは30から始まります。
Functionについては次のように定義されています。
Function
Value
FUNCTION_NONE
0
FUNCTION_MSP
1
FUNCTION_GPS
2
FUNCTION_TELEMETRY_FRSKY_HUB
4
FUNCTION_TELEMETRY_HOTT
8
FUNCTION_TELEMETRY_LTM
16
FUNCTION_TELEMETRY_SMARTPORT
32
FUNCTION_RX_SERIAL
64
FUNCTION_BLACKBOX
128
FUNCTION_TELEMETRY_MAVLINK
512
FUNCTION_ESC_SENSOR
1024
FUNCTION_VTX_SMARTAUDIO
2048
FUNCTION_TELEMETRY_IBUS
4096
FUNCTION_VTX_TRAMP
8192
FUNCTION_RCDEVICE
16384
FUNCTION_LIDAR_TF
32768
FUNCTION_FRSKY_OSD
IT屋さんにはおなじみの数字が書かれています。これは10進数ですが、バイナリーにするとひとつのビットになります。これはひとつのポートに複数のFunctionをもたせることが出来るようにしているからです。現実性は無視して例を上げるとUART1にGPSとFRSKY Telemetryの機能を持たせた場合は2+4で6にセットされます。
最初にあげた例に戻ってみます。
serial 0 8192
はUART1がFUNCTION_VTX_TRAMP、また
serial 1 64
はUART2がFUNCTION_RX_SERIALであることが分かります。ということでPorts画面と一致していることがわかります。
DJI中国には中国語で「以旧换新」と呼ばれる下取りサービスがあります。中国だけのサービスですし紹介してもしょうがない気もしますが、そのスピードにちょっと感心したので時系列を中心に書いておきたいと思います。
下取りに出したのはMavic mini fly more comboです。申込みは中国のDJI Storeで行いますが、実際のオペレーションは爱回收という携帯電話の下取りで有名な会社が行います。経過等はDJI Storeで細かく確認出来ます。
買取額は現金ではなくDJI Storeで使用できるDJI貨幣として支払われます。もともと下取りサービスですので、次にDJIの商品を購入することが前提のサービスになっています。
– 月曜日のお昼過ぎにDJI Storeで申し込み。機体のコンディションや付属品の有無などを自己申告すると引き取り予定額が提示されます。宅配便の引取希望時間を入力して申し込みが完了。引き取り時間は一時間単位で、申込み時間の直後から指定可能。宅配業者は中国で一番信頼されている顺丰(SF)です。
下取り価格は、おそらくネットオークションサイトよりは少ないと思いますが、とにかく簡単で煩わしいこと一切なしであることと、スピードの速さから良いサービスと思います。
「BLHeli_SのRPMフィルター対応無料ファームウェア 」の更新版です。
BLHeli_M 16.9 + Betaflight 4.2を用いたRPMフィルターの設定手順を書いてみました。
BLHeli_MはBLHeli_Sハードウェア向けの無料ファームウェアです。
注意)別の記事 をご覧ください。
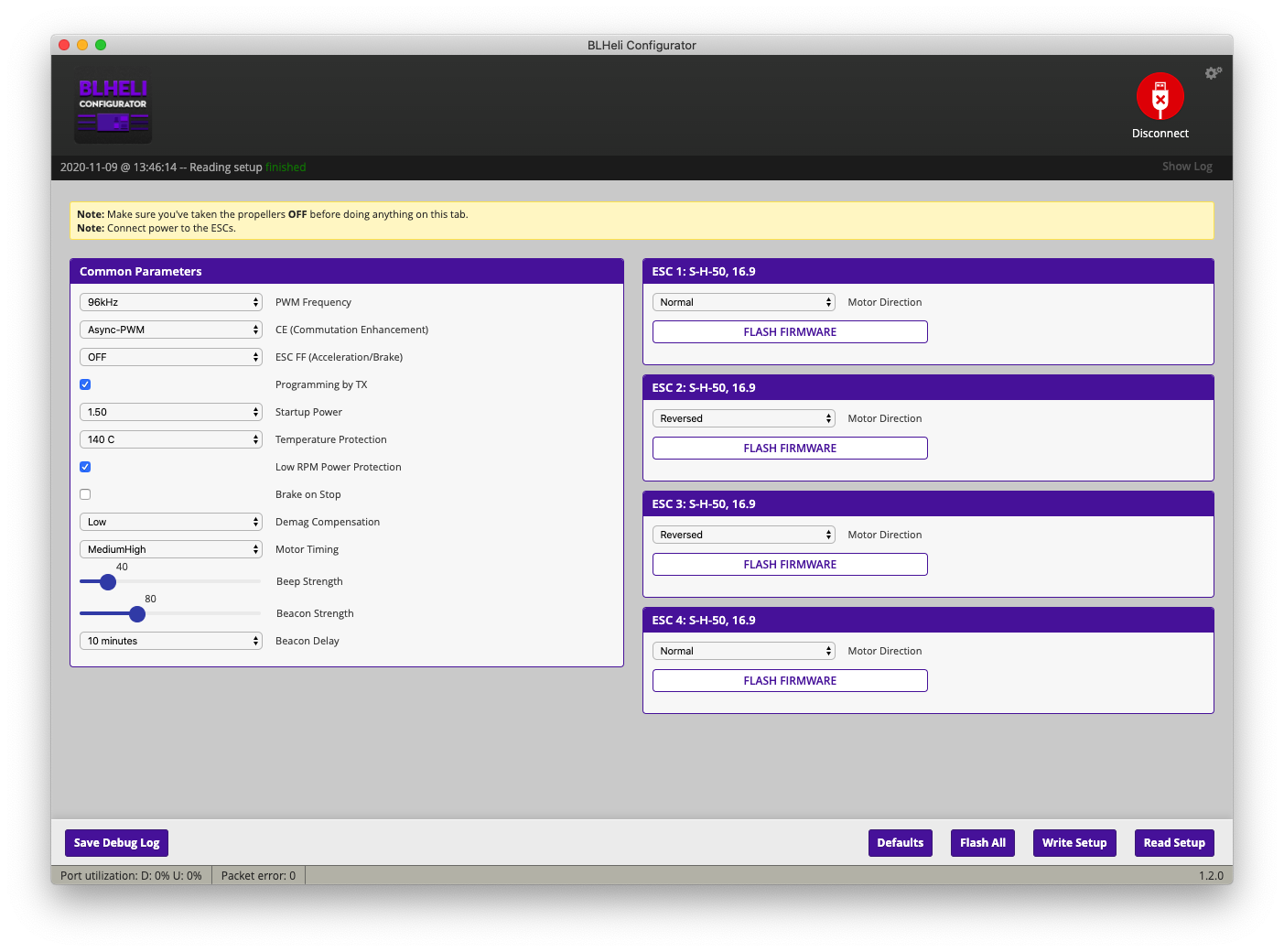
[ BLHeli_Mの導入 ] Configurator を導入し、そこからフラッシュを行います。How to Flash BLHeli_M “という動画が参考になります。わたしは16.9 [Blheli_M Official]というのを導入しました。RPMフィルターはBLHeli_Mであれば使えます。PWM周波数の変更がonfiguratorにありますが、これはBLHeli_M 16.9以上が必要なようです。
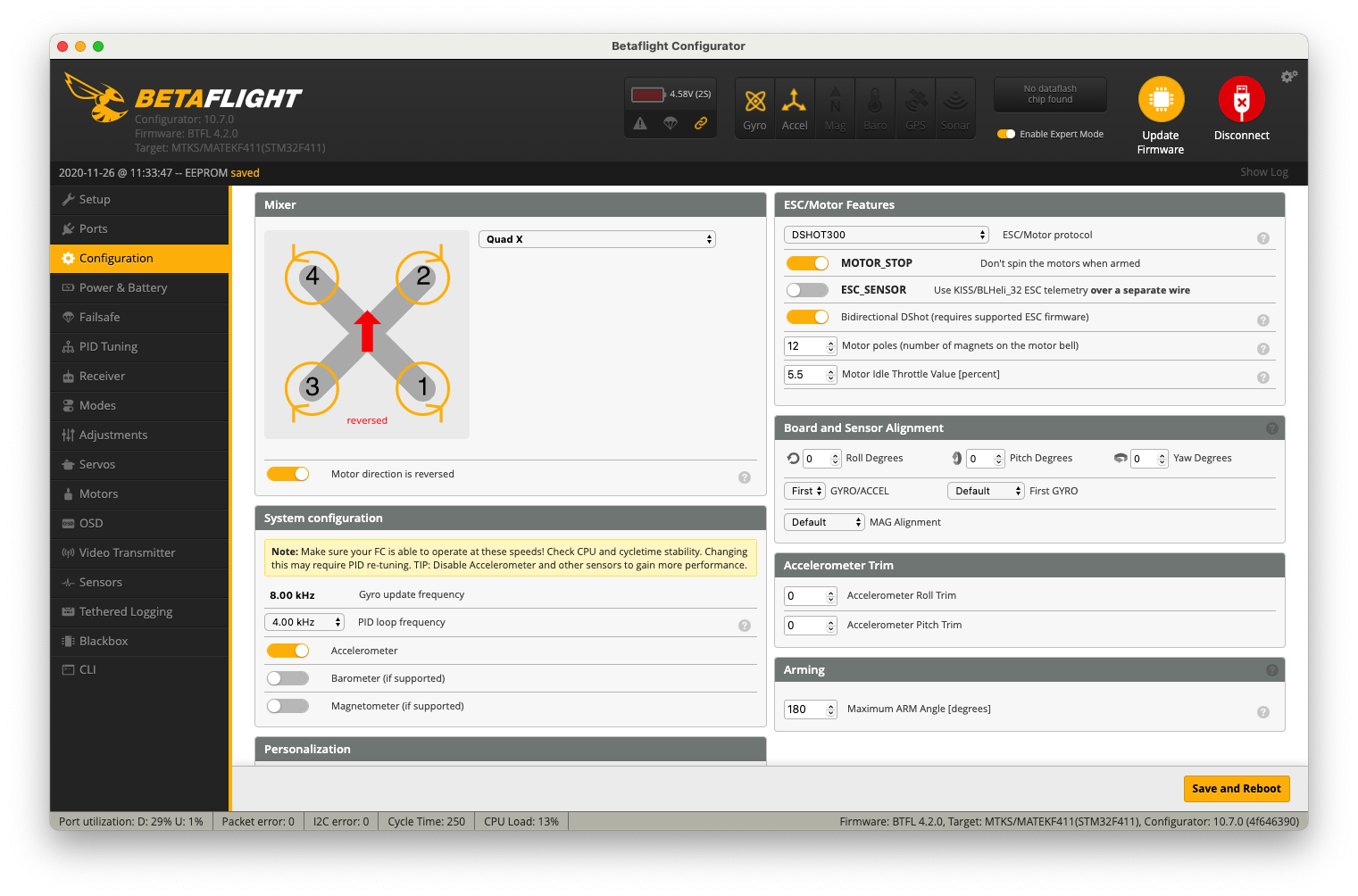
[ Betaflightの設定 ] 公式ガイド に従います。
使用したのはBetaflightのバージョンは4.2.0です。
< Configuration >
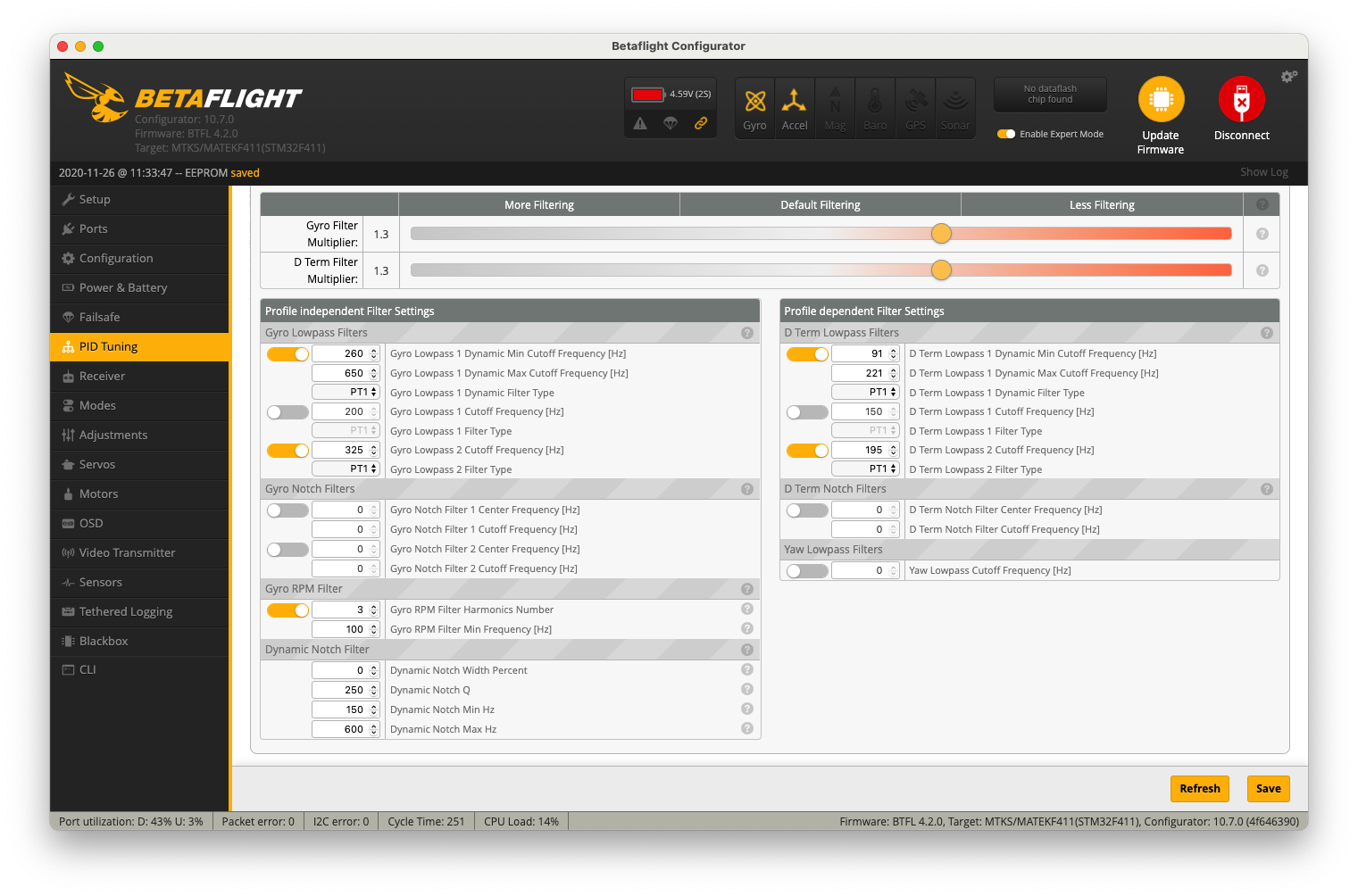
< PID Tuning/Filter Settings >
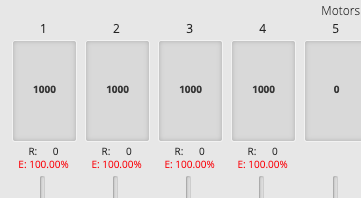
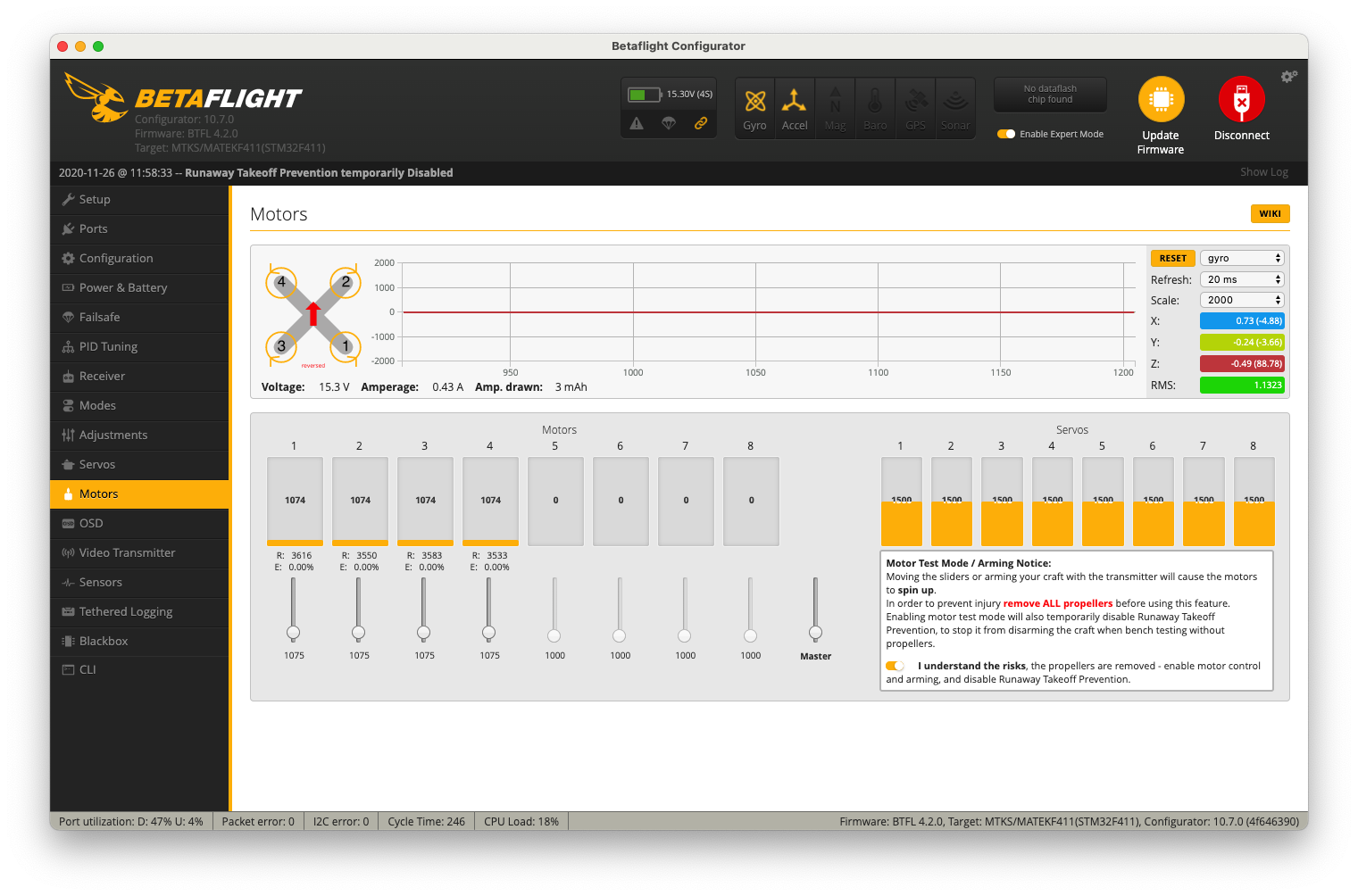
[ テスト ]
Mr Shutterbugが動画 の中で紹介していたWhoopフレームの修理に使えるE6000と書かれた接着剤を試してみました。
ESCのハードウェアは大きく分けて2つの種類があります。BLHeli_32と BLHeli_Sです。以前は悩むことはありませんでしたが、昨年末からBetaflightのRPMフィルターが出現し、またWhoopではPWMを48KHzにすると飛行時間が伸びるなどと言われだしました。BLHeli_32では標準ファームウェアでどちらもサポートしているので問題ありませんが、BLHeli_S用の標準ファームウェアはRPMフィルターを動かすのに必要なBidirectional DSHOTのサポートがありません、またPWM周波数も24KHzに固定されています。
そこで登場したのが標準以外のBLHeli_S用ファームウェアです。いくつか登場していますので、わたしの理解の範囲でそれらについて書いてみます。
[ JESC ]
[ JazzMaveric/BLHeli_M ] JazzMaveric です。これのPWM 48KHz版でRPMフィルターを使用して随分と飛ばしていて特に問題は感じていませんでしたが、Betaflight公式ページによるとバージョン16.73以降でのRPMフィルターの使用は推奨しないということです。16.73を使用すればよいのですが、このバージョンはPWM 24KHz版しかありません。
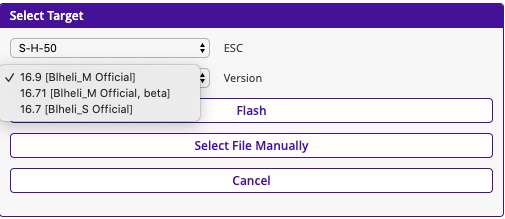
そして、最近になってJazzMavericがいつの間にかBLHeli_Mというものに進化しているのに気づきました。ファームウェアの書き込みは専用のConfigurator から行います。2020年11月13日現在、このConfiguratorで書き込めるのはBLHeli_S 16.7 Official, BLHeli_M 16.71 Official beta, BLHeli_M 16.9 Officialの3つのバージョンです。
BLHeli_Mは何かしら変更されているとは言えJazzMavericそのものです。そこで問題となるのはRPMフィルターを使用して良いかどうかということです。BLHeli_M 16.71はおそらく問題ないと思います。BLHeli_M 16.9がどうなのかは今ひとつ分かりません。
VIDEO
UAV Techの人が16.9で問題は見当たらないと言っているので大丈夫な気がします。わたしもしばし16.9でRPMフィルターを使用して飛ばしてみたいと思います。
[ bluejay ]
昨年末くらいだと思いますがESCを48KHzで使用することによりWhoopサイズでは電池の持ちが改善するということを聞きました。当時、BLHeli_Sを使用する機体ではJazzMavericもしくはJESCの48KHzバージョンのファームウェアを導入することでPWM周波数の変更するしかありませんでした。自分でバッテリーの持ちの改善具合をテストしてみたいと思いながらもファームウェアを焼き直してまで試すことはありませんでした。
最近になってBLHeli_Mというファームウェアの存在を知りました。これはJazzMavericの流れを組むものでConfigurator でPWM周波数が選択できます(導入はこのConfiguratorから行います。無料でRPMフィルターが使用できます)。これにより気軽にPWM周波数を変更出来ますので、やっと自分で電池の持ちの変化を確認する気になりました。
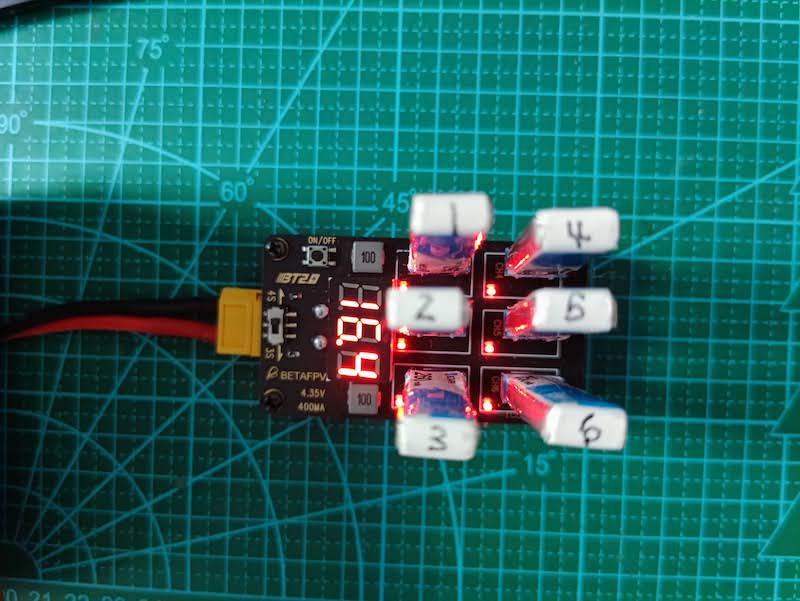
テストに使用した機体:
Beta65 Pro FrameEmuflight 0.3.2 + MOCKINGBIRD 準拠の構成
EmuFlightのPower TabでWarning Cell Voltageを3.3V、Minimum Cell Voltageを3.2Vに設定しました。
テスト方法:
結果:
24KHz 48KHz 96KHz
Low Battery Land Now Low Battery Land Now Low Battery Land Now
1
133
149
156
173
162
178
2
125
142
148
166
156
172
3
122
138
152
163
148
160
4
124
141
151
166
149
165
5
129
138
153
166
147
157
6
119
128
152
158
144
156
Average Time(s)
125.33 139.33 152.00 165.33 151.00 164.67
Improve% to 24KHz
21% 19% 20% 18%
結論:
このバッテリー持ちの改善効果は小さい機体だけとの話しです。機体サイズを変えてテストしてみたいですが大きな機体になると屋外テストが必要ですしなかなか手が出そうにありません。
VIDEO