FPVドローンに搭載するFCに記録されるログの中からジャイロデータを抽出し、それを利用して動画の安定化を図る方法があります。色々と解説が出ていますがWindows 10によるものがほとんどな気がします。ここではmacOS Big Surでの事例を紹介します。
本来の目的はドローンの飛行中の動画に適用するものですが、一眼レフの上にFCを単独で載せて手持ち撮影の動画の安定化を試してみようという試みでもあります。

大きな流れはBlackbox Log Viewerでログをcsv形式で保管、それをgyroflowで処理し動画をスタビライズするというものです。これとは別にBlackboxToGPMFというソフトウェアでGoProコンパチの動画ファイルを作り、既存のReelSteadyGoで処理する方法もあります。
2021/02/24追記)
以下Pythonのセットアップから書いていますが、直接実行可能なパッケージが提供されるようになりました。
Gyroflowの公式ページのDownloadにある実行可能ファイルをダウンロードします。macOSの場合は拡張子dmgになっています。これを実行するとgyroflowという実行ファイルとcamera_presetsフォルダーが見えます。これを適当な場所にコピーしてgyroflowをダブルクリックもしくはターミナルから実行するだけです。ただし起動にかなり時間がかかります。わたしのMacBook proでは一分近く待つとgyroflowのウインドウが開きます。
[ Pythonのセットアップ ]
わたしのmacOS Big SurにはPython2.7とPython3.7が最初から入っていました。必要なのはPython3系なので3.7で試してみましたがうまく行きませんでした。最新の3.9なら大丈夫そうということで、常套手段であるpyenvを導入して色々とやってみましたが問題続出でひとつひとつ片付けていってもダメでした。思い直してbrewもpyenvも忘れることにしてパッケージで導入しました。以下手順です。
– https://www.python.org/のDownloadページから現時点での最新版3.9.1のmacOS版インストーラーをダウンロードして導入。
– ターミナルを開き直すとpython3.9が使用可能になっています(python3で起動できます)。
– “pip3.9 install numpy” でNumPyモジュールを導入します。
同様に以下のモジュールを順次導入します。
– opencv-python, PySide2, scipy, orangebox, construct, python-dateutil, hachoir, matplotlib, VidGear
[ Gyroflowのインストール ]
GuroflowのダウンロードページにmacOSの実行ファイルがありますが、今ひとつ動かし方が分かりません。GithubからソースコードをダウンロードしてPython3で起動することにします。
https://github.com/ElvinC/gyroflowのCodeボタンを押してzipで全てのコードをダウンロードし任意の場所に解凍します。
ターミナルを開き解凍したフォルダーにcdしてpython3 gyroflow.pyで起動できます。
[ FCの準備 ]
一眼レフの上に適当なマウントを作ってFPVドローン用のFlight Controllerを単独で載せました。なるべく多くのログが取得出来るようにMicroSDカードが使えるFC(MATEX F722-STD)にしました。給電はモバイルバッテリーからUSBで行います。一般的には飛行開始時に行うARM動作でログの取得を開始するようになっていますが、FC単体ではログを開始するきっかけがありません。そこで下のCLIコマンドにて電源投入と同時にログを開始するようにしました。
blackbox_mode = ALWAYS
問題はログを停止する手段がないことです。仕方がないので録画終了からしばらく時間をおいてUSBケーブルを抜いて電源を切るようにします。
[ 録画 ]
後からジャイロデータと動画の同期を行う必要があるので、動画の最初と最後にわかりやすい動きを記録しておきます。カメラを大きく横と縦に振っておくと良いです。
[ 実際の手順 ]
動画にまとめましたので、それを見ていただくのがわかりやすいと思います。
いくつか動画の補足を書いておきます。
– YouTubeに作者らしき人からコメントをいただきました。Initial rough gyro offsetを計算してセットしていますがgyroflowは+/-5秒で同期ポイントを探すので5秒以下のズレならば何も入力しなくても良いそうです。
– もとの動画は59.94FPSでした。これをgyroflowで処理する方法もあるのかも知れませんが、よく分からないので予めDaVinci Resolveで30FPSに変換してから使用することにしました。
– Blacbox Log Explorerでオフセットを調べていますが、これはあまり正確な数値を追求しなくても大丈夫です。gyroflowが自動的に同期タイミングの調整を行ってくれます。
– gyroflowはBlackboxログの生ログを読み込めますが、今の所うまく動かない気がします。blackbox log explorerでCSV形式で書き出したものはうまく処理出来ます。
– Gyroflowのcamera presetsが何者かは良く知りませんが、色々とためして一眼レフで取得した動画で歪の無い出力が得られるものを探し当てたものがlgg6_normal_16by9というだけです。論理的な理由があるわけでは無いです。
– Syncを計算した後にDelay for sync 1とDelay for sync2が表示されます。これを見ると動画の最初と最後では随分とオフセットが変わるのがよく分かります。
– Exportした動画は何か不具合があるようでmacOSのプレビューも出来ないですしDaVinci Resolveに読み込むことも出来ません。こんな時の定番がVLCです。VLCは他で読めない動画ファイルの再生が出来ます。VLCに読み込んで改めて書き出すことによりDaVinci Resolveに取り込むことが出来るようになりました。これはいずれgyroflowで修正されるものと思います。
=> 環境依存のようですが、Color profileがyuv444の動画になっているのが原因でした。gyroflowの画面に書かれているとおりにExportする時にyuv420pという指定を”FFmpeg color spae selection”という所に書き込めばOKです。
– Exportした動画はフレームが踊っている変わった動画です。中央を上手に切り取ることによりスタビライズした動画となります。
以前から実験用の電源を欲しいと思っていましたが、リポバッテリーを利用した実験用電源セットで間に合っていました。いまでもそれで問題は無いのですが、良さげな電源がTBS COUCHで紹介されていたので購入してみました。中国での価格は5インチドローンのリポ、2本分くらいなので実験のためにリポを充電したりして消耗させるより良いかもです(物欲理論でやや難あり)。
リポ電池を電源とした自家製テストキット
TBS COUCH中でTrappyは電流制限機能があるのでスモークストッパーの代わりになると言っていますが、そこはやや疑問ありです。これについては後ほど詳しく書きます。
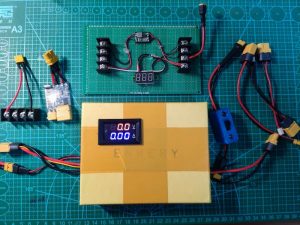
購入した電源はWanptek NPS3010Wというものです。TBSで販売しているのはDPS305Uという型番なので少しスペックが違います。TBSで販売しているのは5A仕様ですが私のは10A、またTBSの物は18WのUSB充電機能が付いていますが私のはUSB出力はありません。

電源にはミノムシの付いたケーブルが付属していますが、ドローン用にXT60の付いたケーブルを作りました。XT60からの各種変換ケーブルは以前のテストキット用に作って有るので、これで何でも接続できます。

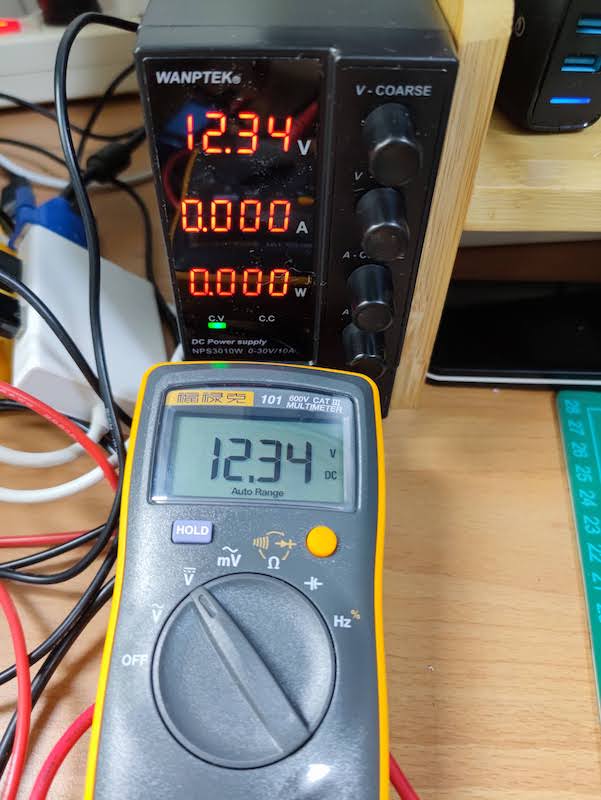
電圧は0-30Vの間で自由に設定できます。 4桁のLED(小数点以下2桁)で電圧を確認出来ます。そこそこの精度があるのでテスター等で確認する必要はありません。

簡易スコープで見る限り変なリップルもありません(高い周波数のノイズは分かりません)。
電圧が簡単に設定出来るので3.3Vの受信機の単体テストにも使えますし1Sから6Sまでリポの代わりにもなります。
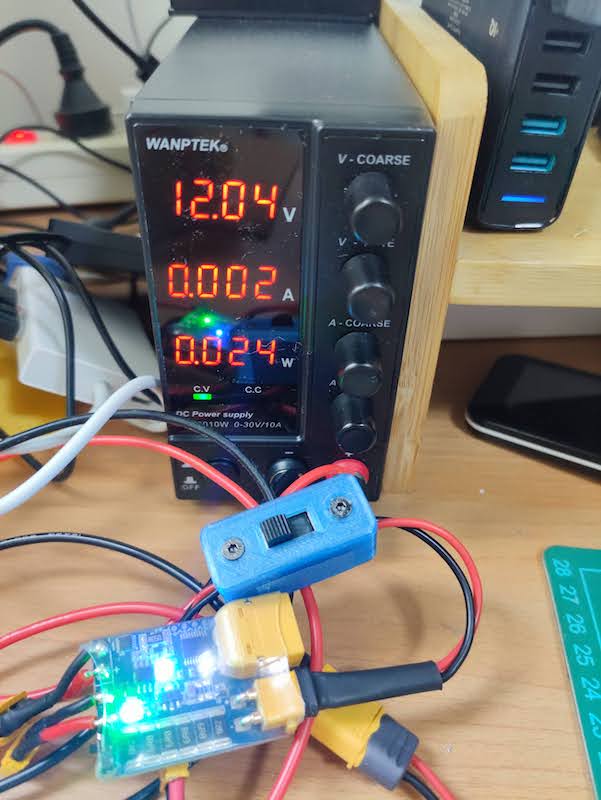
この電源には定電流モードがあります。電流値を設定しておくと、それ以上の電流は流れません。設定方法がややトリッキーです。表示板の電流計はリアルな電流しか表示出来ません。そのため無負荷だと0.000Aのままです。そこで電流調整ツマミを回しても何も出来ません。電流値を設定するためには出力をショートさせないといけません(目標電流より十分に沢山の電流が流れる負荷でも良いかも)。流石に最初に試すときはビビリながらやりました。
これがあるのでどこかショートしていても安全かも知れません。ただし、これは過電流の時に電源をシャットダウンするものではありません。一定の電流を供給し続けるように設計された電源です。つまり、電流が流れすぎたら電圧を下げていって設定された電流を流し続けるように動作します。もし何かしらの不具合で電流が流れすぎた場合も、設定値までの電流は流れ続けます。燃え上がることは無いかもしれませんが、じわじわと壊すことはあるかも知れないので、この機能ををSmoke stopperとして使うことはお勧め出来ません。

12V、電流制限値1Aに設定して自作のテスターを通した先でショートさせた様子。テスター上ではショートしているので電圧は0ながら電流は1A流れているのが分かる。また電源に付いている赤いLEDの点灯が電流制限モードに入っていることを示している。

ということで私としてはVIFLYを併用することにします。
10Aも流せるのでモーターの回転方向の確認、RPMテレメトリーのテストなども余裕でこなせます。
電流表示も信用できるのでFCの電流計の校正も手軽に出来ます。なんかこれが一番のメリットかもです。
流石に中国で購入するより少し高いけどアマゾンにもありました。
DJI中国には中国語で「以旧换新」と呼ばれる下取りサービスがあります。中国だけのサービスですし紹介してもしょうがない気もしますが、そのスピードにちょっと感心したので時系列を中心に書いておきたいと思います。
下取りに出したのはMavic mini fly more comboです。申込みは中国のDJI Storeで行いますが、実際のオペレーションは爱回收という携帯電話の下取りで有名な会社が行います。経過等はDJI Storeで細かく確認出来ます。
買取額は現金ではなくDJI Storeで使用できるDJI貨幣として支払われます。もともと下取りサービスですので、次にDJIの商品を購入することが前提のサービスになっています。
– 月曜日のお昼過ぎにDJI Storeで申し込み。機体のコンディションや付属品の有無などを自己申告すると引き取り予定額が提示されます。宅配便の引取希望時間を入力して申し込みが完了。引き取り時間は一時間単位で、申込み時間の直後から指定可能。宅配業者は中国で一番信頼されている顺丰(SF)です。
– 申込みから約一時間後に引き取り完了。
– 火曜日の午前に爱回收に到着してインスペクション開始。
– 火曜日午後7時にインスペクション完了の連絡。問題なしで最初の提示金額がDJI貨幣として自分のDJIアカウントに振り込まれた。そのままDJI mini2 fly more comboを発注。
– 水曜日の朝9時過ぎに発送の通知が来た。深センより発送されるので、やや時間はかかる。
– 金曜日の午後2時頃にmini2の配達完了。

下取り価格は、おそらくネットオークションサイトよりは少ないと思いますが、とにかく簡単で煩わしいこと一切なしであることと、スピードの速さから良いサービスと思います。

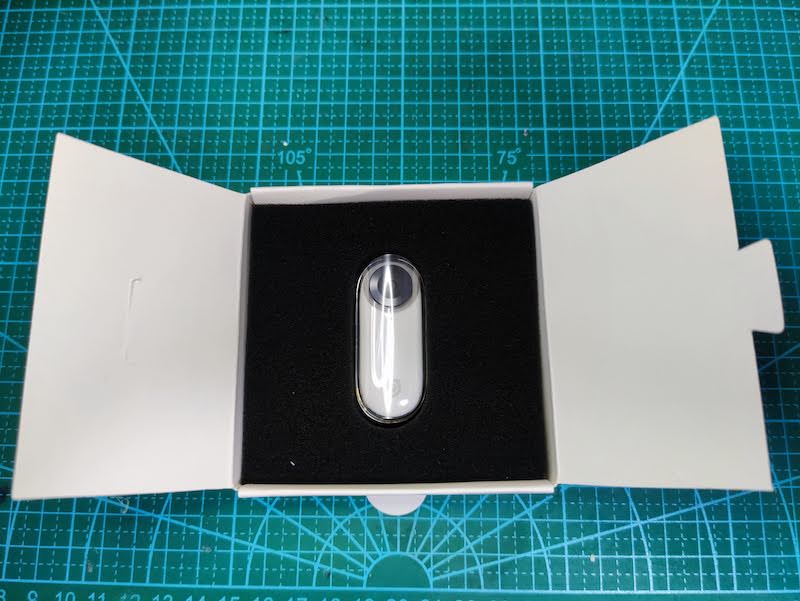
一部SNSで紹介済みですがInsta360 Goを見事な操縦技術でまっすぐに公園のベンチの金属部分にぶち当ててレンズを割ってしまいました。SNSでは言っていませんが同時にCaddx Nubulaのレンズも割っています。
先にInsta360 Goのレンズを破壊済みの同志から公式サイトで修理を受け付けていることは聞いていましたので修理に出しました。その経過を書いておきます。
9月15日(火) Insta360の公式サイトの修理サービスというページから修理依頼を行いました。直ぐにメールで故障した製品の送付手順が送られてきた。公式サイトは日本語で操作していましたが、在住国が中国なのでメールは中国語です。
9月17日(木) 宅配便にてレンズの割れたInsta360 Goを送付。修理サービスサイトに宅配便のトラッキングコードを入力。
9月19日(土) 目的地に到着しているものの休日のため配達出来ず。
9月21日(月) 配達完了。Insta360から受け取った旨のメールを受信。
9月22日(火) Insta360から検査完了のメールを受信、けっこう夜遅くでした。
9月23日(水) 修理の見積もり価格の提示があった。午前中に価格の提示があったが、実際に支払ったのは夕方遅くでした。にもかかわらず、すぐに発送のお知らせが来ました。
9月25日(金) 荷物到着。シリアル番号も違う新品が返ってきました。ちょうど10日目に戻ってきましたが、わたしの方からの発送が2日ほど遅れたので実質8日間でした。まずまず悪くない対応だと思います。

修理費用は新品購入価格の約7割ほどでした。付属品を除いた本体だけの値段と考えれば納得です。
FPVドローンの世界で小型精密電動ドライバーと言えばWowstickですが、小米からも同様というかそっくりな製品が出ているので入手してみました。
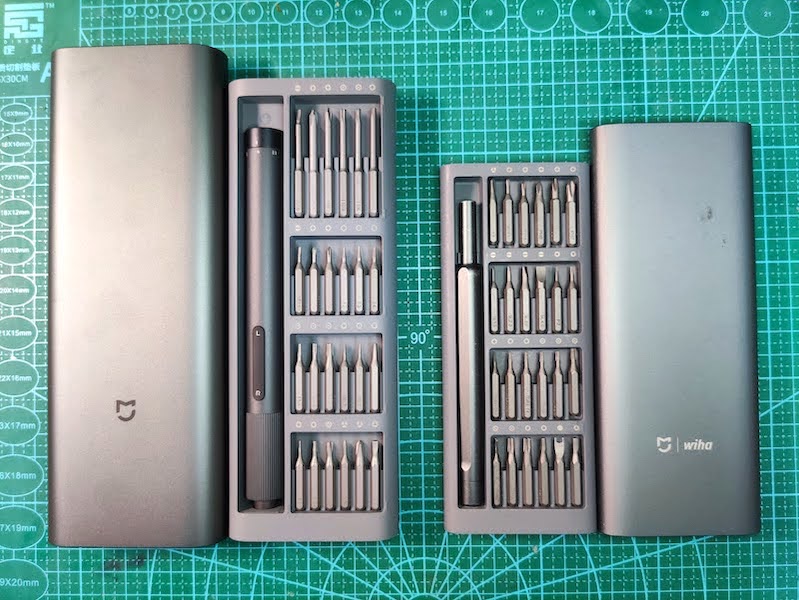
もともと定評のある小米の精密ドライバーセットを使用していました。これは日本語での記事も多数見つかるようにとても出来の良いものです。代表的な記事としてEngadegt Japanに我らがガジェットキングShimoKenさんが書かれているものをご覧いただくと良いかと思います。この製品はほんとうに良く出来ているので、その流れを組むのならば電動版もきっと良いものであろうと思い買ってみることにしました。

右が以前から持っている精密ドライバーセットです。ケース上にドイツのWiha Toolsのロゴがあります。実際にはビットの一つ一つにもwihaと刻印されています。左が今回購入した電動精密ドライバーセットです。当然ですが、非電動品より一回り大きい筐体です。残念ながらWihaロゴはありませんが、大変良く似たデザインになっています。ビットはそれぞれ微妙に違うので、両方持っていることの意味が出てきて私的には嬉しいです。電動の方に付いている長いサイズのビットも地味に嬉しい。
初日に充電してから、数日使用していますが、まだ電池切れまで使っていませんので電池の持ちとかは分かりません。この間にBeta95X V2のフレーム交換を一回とあとは日常的な作業をこなしているので、おそらくは電池の持ちで不満を持つことは無いと思います。
トルクは二段階に調整出来ます。そこそこの強さはありますが、固めに閉まっているネジは最初に手で回して緩める必要があります。それも本体が普通のドライバーのような太さですので、片手で回して緩んだところで電動をスタートするというのが握り直すこともなく一連の動作で行なえますので効率が良いです。逆にネジを締める時に自分の手の力で締めたい時も同様に一連の動作で電動駆動から手回しに移れますのでとてもスムースです。
小さなドローンではネジの数もしれていますし、手回しでも疲れるということはありませんが、一度電動ドライバーを経験してしまうと手放せなくなります。日本で入手出来るかどうかはわかりませんが中国での販売価格はかなり手頃なものですしオススメのツールです。
最初にも書きましたがWowstickにそっくりです。何かしら関係があるのかと軽く調べてみましたが、まったく繋がりは見えてきません。パクリ商品なのでしょうかね?
2021/01/06 追記) バッテリーの持ちは半端なし
2020年9月半ばに購入しフル充電して使用していました。なかなかバッテリーが無くならずとうとう年越し。このままずっと使えるのではないかと思えるほどでした。2021年1月5日にやっとバッテリーが無くなり2度目の充電を行いました。小型のFPVドローンをかなり頻繁に分解組み立てを繰り返していましたので、そこそこの使用頻度です。大雑把な感覚で週に30本から50本のM2ネジの開け締めを行っていたと思います。それで3ヶ月半使用できたのは驚きです。
gopro-remote-stickCはまだ開発が始まったばかりということもあって機能も単純ですし接続できるGoProも一台に限られます。FPVドローンで使用する場合、録画開始、停止だけ出来れば良いのですでに十分に役に立つものになっています。
ところが複数のGoProを使用しているので接続できるのが一台だけでは困ります。M5StickCは安価ですし、GoProの数だけM5StickCを準備しようかと考えているうちにブログラムに手を入れずに解決する方法を思いつきました。思いついただけで実験する前にアイデアをTwitterのスレッドでつぶやいたところpapalagi.orgさん(M5StickCを使っている皆さんウオッチした方が良いですよ)が検証してブログに書いてくださいました。
アイデアはとても簡単です。gopro-remote-stickCは接続するGoProのSSIDとパスワードをソースコードに書き込んで使います。そのプログラムのファイル名を接続するGoPro別に変更して複数持つだけです。具体的な方法については、先のpapalagi.orgさんのブログに書かれていますが、私の別のやり方を簡単に紹介しておきます。
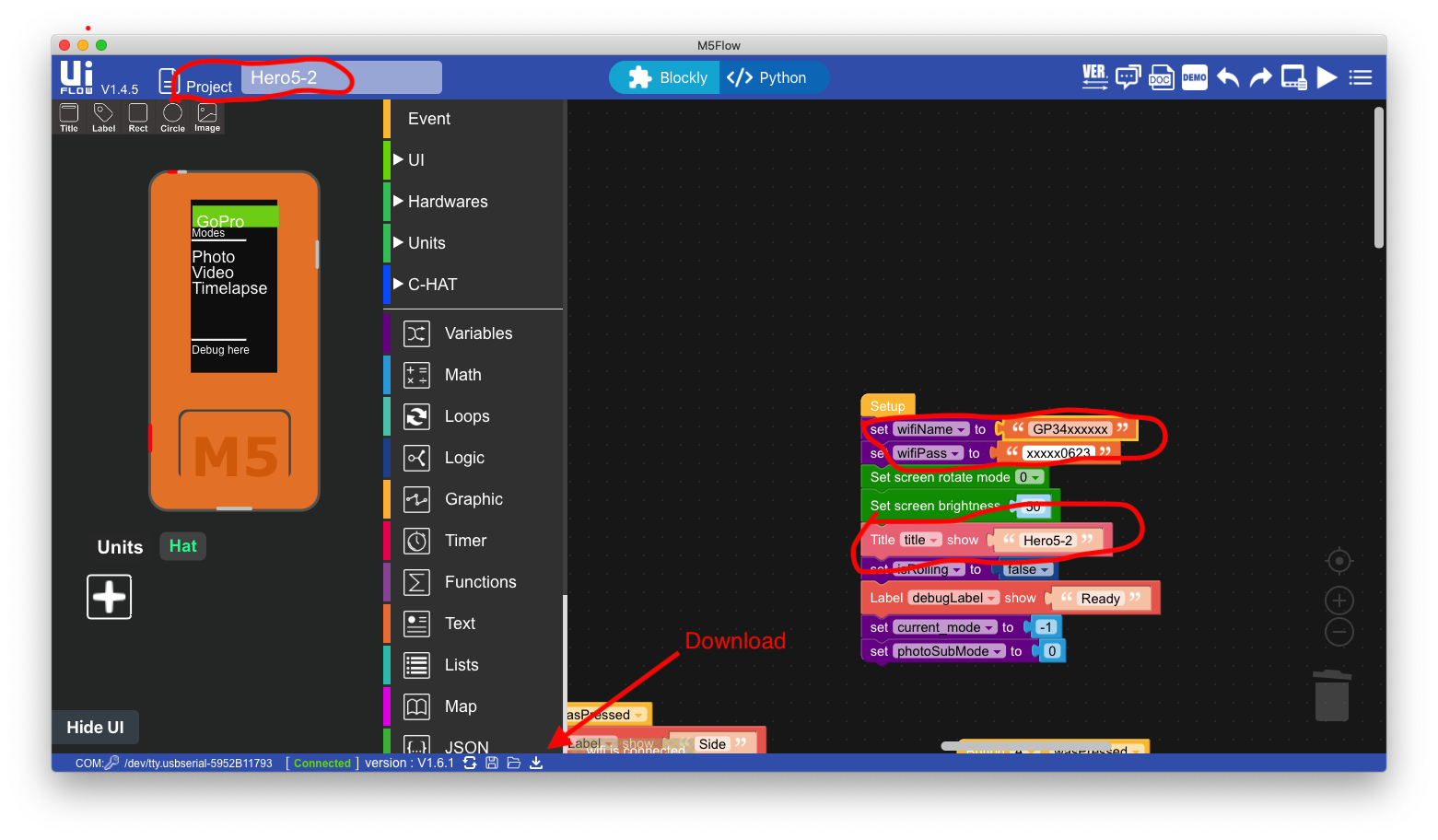
UIFlow DesktopでM5StickCをUSB接続していることを前提としての説明です。M5StickC側でUSBインターフェースを選択する方法はpapalagi.orgさんのブログをご覧ください。
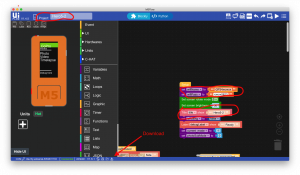
GoProのSSIDとパスワードは上の画面のwifiNameとwifiPassに設定します。それに加えて左上のProjectの名前を接続相手を分かるようにします。Downloadすると、これがM5StickC上のプログラムファイル名になります。もうひとつtitleも同様に接続相手のGoProを識別出来るものにしておきます。プロジェクト名と同じにするのが良いでしょう。これにより実行中のプログラムのタイトルをみれば、どのGoProを対象としたプログラムかがわかります。
この手順でプログラムが増えていきますが、不必要となったプログラムを消す時はpapalagi.orgさんのブログに書かれているVSCodeを利用すると良いようです。
GoProの録画開始停止を行うもうひとつの方法です。

M5StickCという小さなコンピューターをGoProのリモコンにしている人がいるとの情報を見かけたので試してみました。最初はC言語で書かれたM5GoRemoteというのを試しましたがうまく接続できませんでした。開発者はHero4でテストしていて新しいのでも動くんじゃない?というスタンスですので致し方なし。その後papalagi.orgさんが実験的にコードに手を入れて接続は可能になったようですが、今ひとつみたいな感じです。
もうひとつUIFlowというプログラミング環境を使用したgopro-remote-stickCというものをpapalagi.orgさんがブログで紹介されていますので、それを試してみました。必要最低限の機能しかありませんが、問題なく動きます。WiFi接続に必要な時間も短いですし、本物のGoPro Remoteと値段は比べ物にならないくらい安いですし、これはかなり有効なソリューションと言えます。
最初、導入に苦労しましたが、必要なことは全てpapalagi.orgさんのブログに書かれていますので詳細は、そちらに譲ります。ここでは、予め知っておいた方が良いことや私が迷ったことについて書いておきます。
まず最初に把握しておくべきなのはそれぞれのボタンの役割です。UIFlowがロードされた状態での各ボタンによる操作はUSBモードへの切替方法という記事を見ると良くわかります。最新のUIFlowですと画面がかなり変わっていますが、基本操作は同じです。
開発環境にはUIFlow Desktop IDEとブラウザー版のふたつのIDEがあります。Desktop版はUSB経由でM5StackCに接続します。ブラウザー版はWiFiネットワーク経由で接続します。ブラウザー版の場合、M5StickCも自宅などのWiFiに接続しておく必要があります。SSIDとパスワードはM5BurnerなどでUIFlowを書き込む時に同時に設定します。WiFi接続されるとM5StickCにAPI Keyが表示されますので、それに基づいてブラウザー版IDEはM5StickCと接続されます。Desktop版でUSB接続する場合はM5StickCのSetupでUSBを選択する必要があります。またGoProのアプリを起動したあとはWiFi接続がGoProを探しに行ってしまうのでブラウザー版IDEに接続する場合はM5StickCのSetupから正しいSSIDを選択する必要があります。
ブラウザー版の方が新しいデバイスやソフトウェアに対応しているので、こちらを使用したいのですが、ユーザープログラムの読み込みがうまく行きません。papalagi.orgさんのブログにあるようにDesktop版からpythonコードのコピペが必要です。おそらく何かしら解決方法があるのでしょうけど、今の所見当たりません。Desktop版でUSB接続すれば問題はありませんが、これも毎回M5StickCのSetupでUSBを選択する必要があります。
現在のところ、GoProの状況を見ることはできませんし、一台のGoProにしか接続できないアプリケーションですが十分に実用になると思います。複数のGoProに接続する方法は、次の記事で紹介する予定です。
3Dプリンターを持っている人は、自分でデザインしたモデルだけではなく、https://www.thingiverse.com/ などからダウンロードしたSTLファイルを出力したりしていることと思います。そういったSTLファイルを少し加工して自分の用途にあった新たなモデルを作りたいと思うこともあるでしょう。
わたしはFusion360はSTLファイルも読み込めるし、それは難しいことではないと思っていました。ところがいざやってみようとすると、Fusion360で、そのままSTLファイルを読み込んだのではどうにもならないことが分かりました。調べてみるといろいろと複雑な手順が必要になります。そこで思い出したのが数日前にYouTubeで見たSTLファイルの簡単な加工例でした。
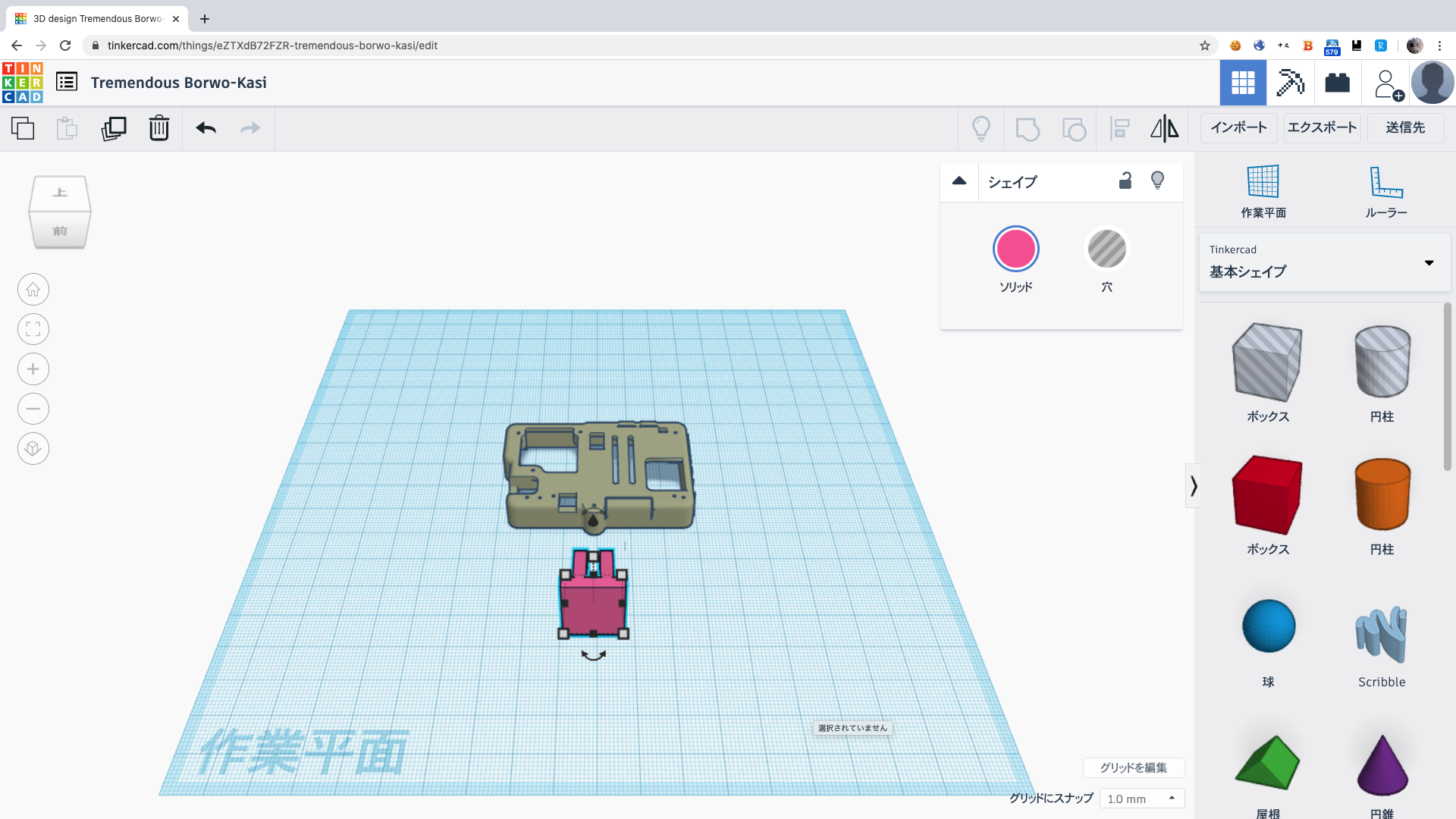
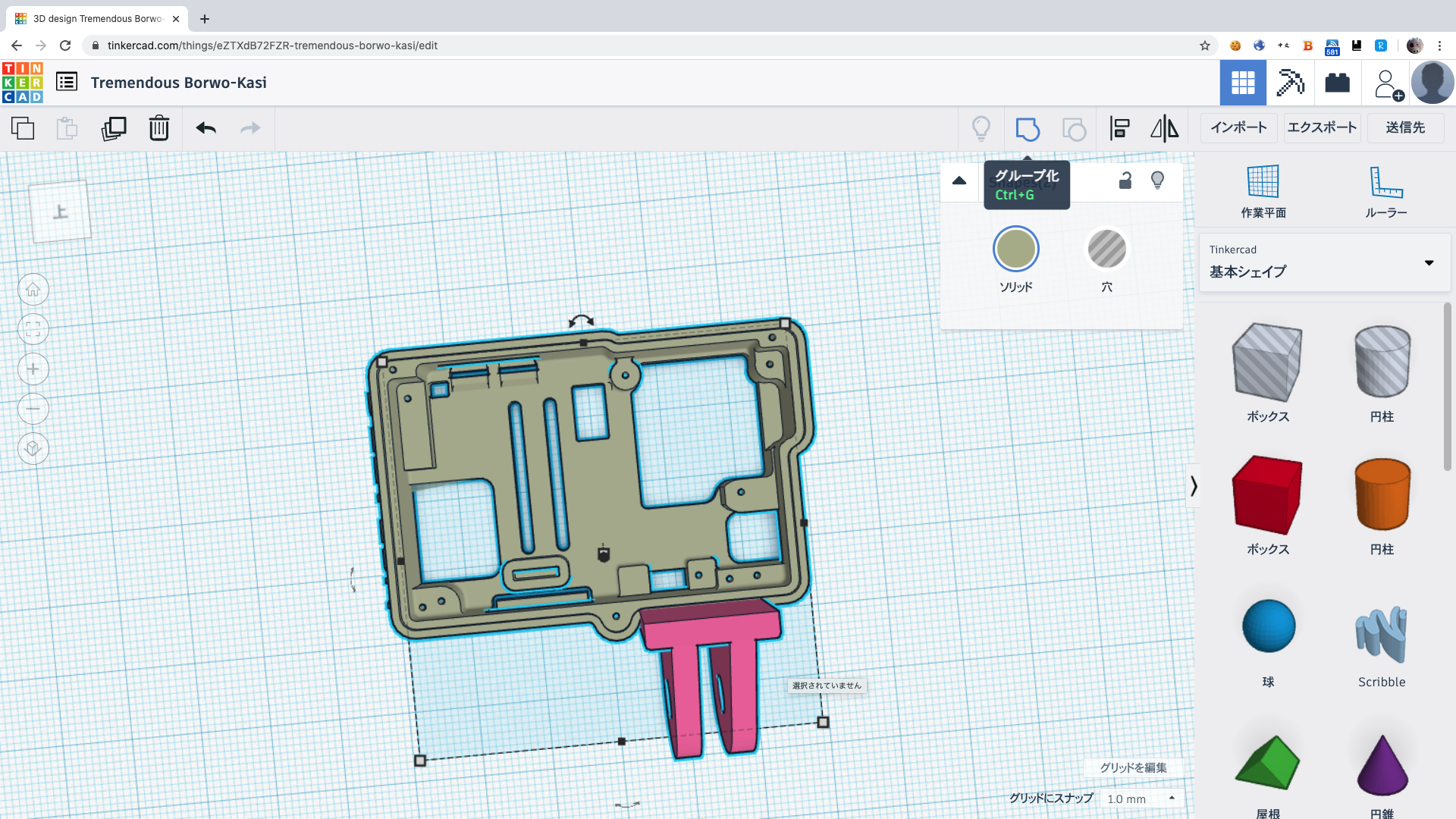
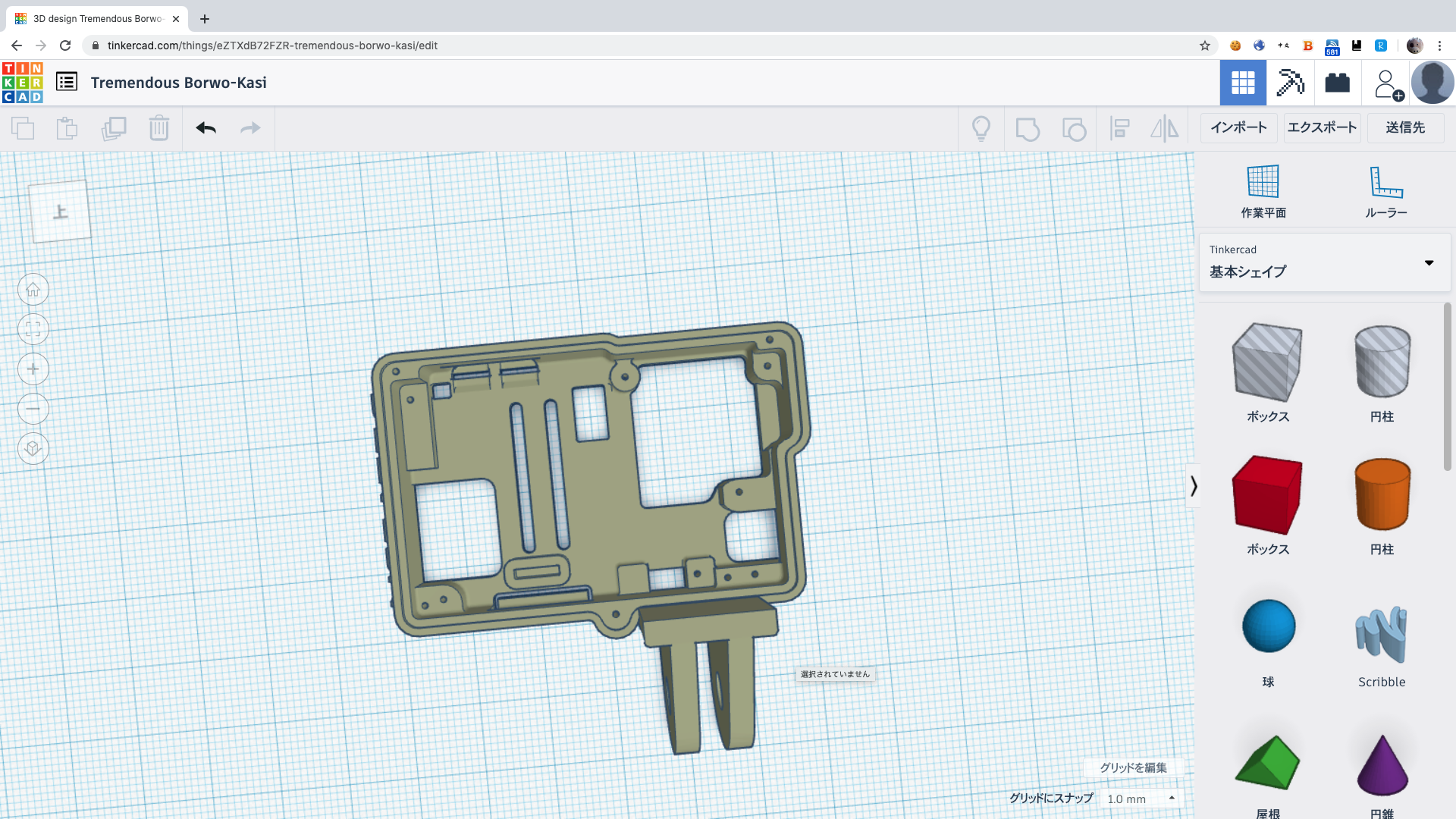
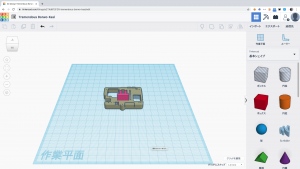
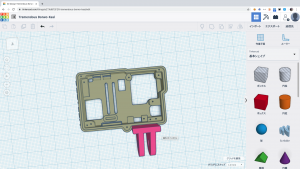
使用するのは子供向けの3DモデリングアプリケーションAUTODESK Tinkercadというwebベースのアプリケーションです。使い方は先のYouTubeビデオを紹介すれば良いだけですが、せっかくなので私の加工例を紙芝居的に紹介します。これで、どれだけ手軽かが分かると思います。
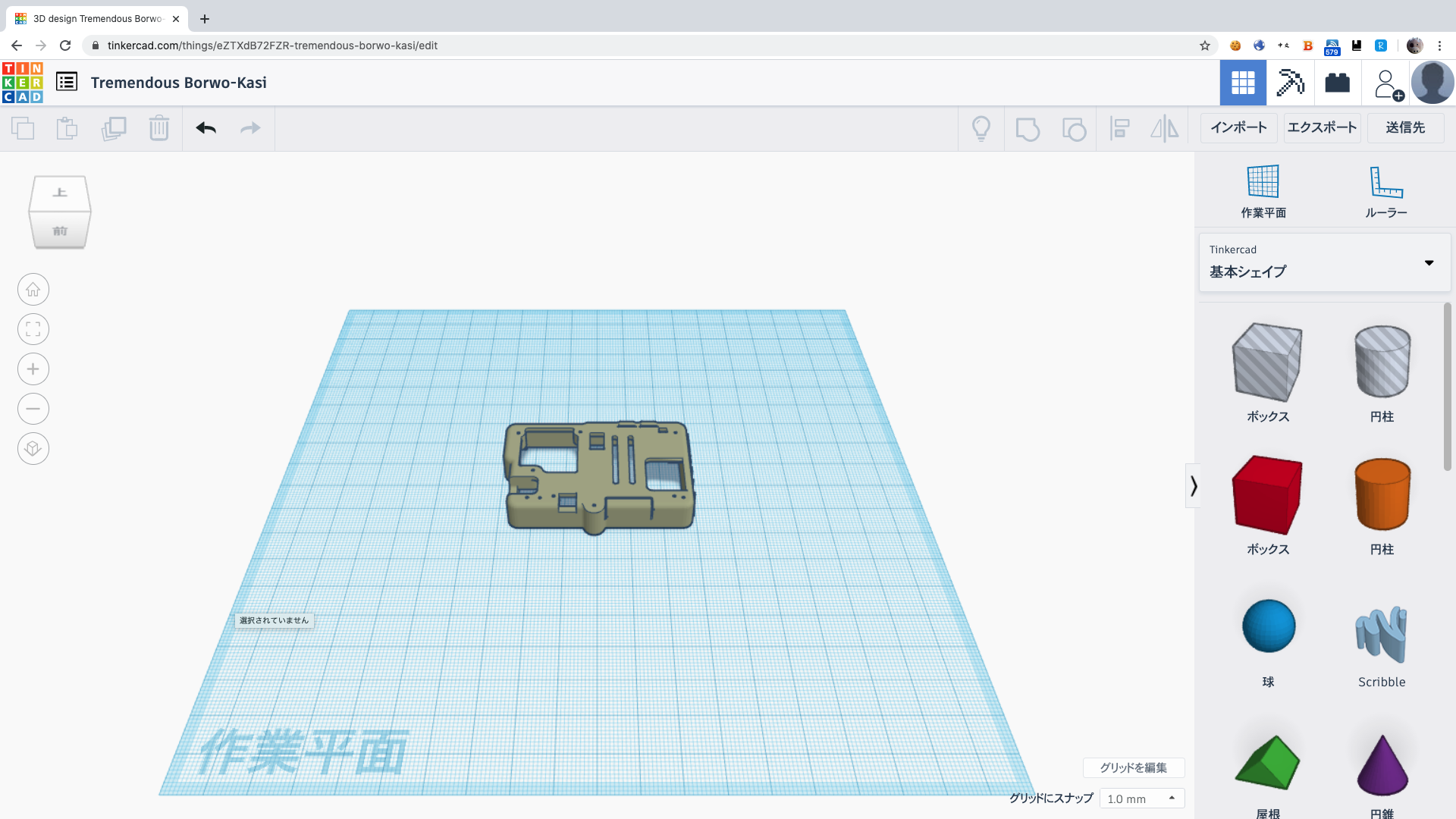
BetaFPVという会社が作って公開しているGoPro Liteのケースをインポートする。
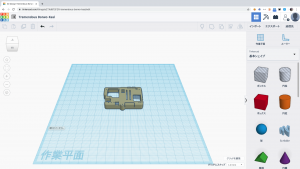
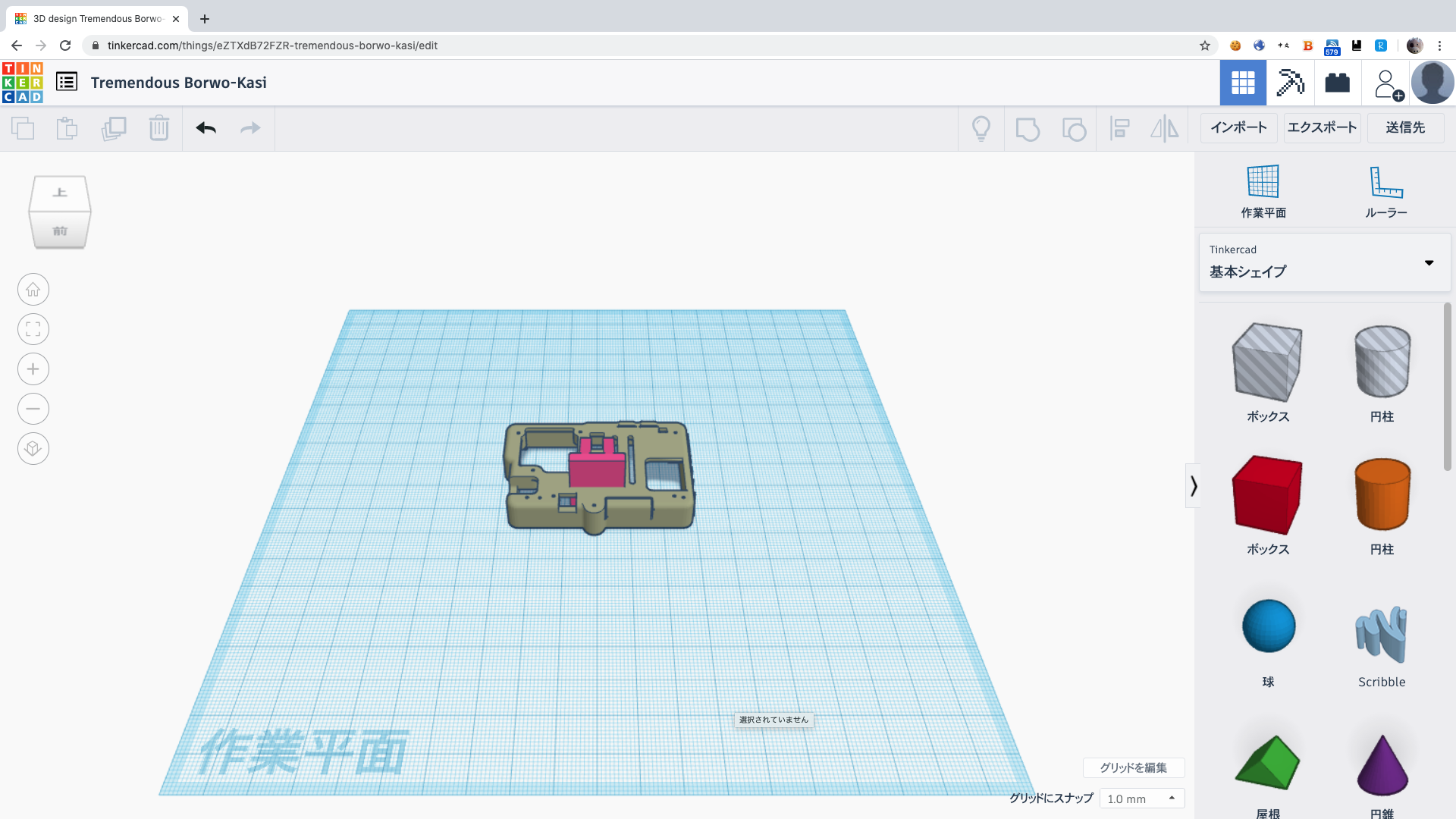
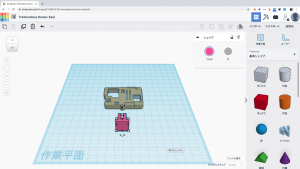
それに合成したい自作のSTLファイルをさらにインポートする。
重なってしまうので、とりあえずドラッグして移動する。
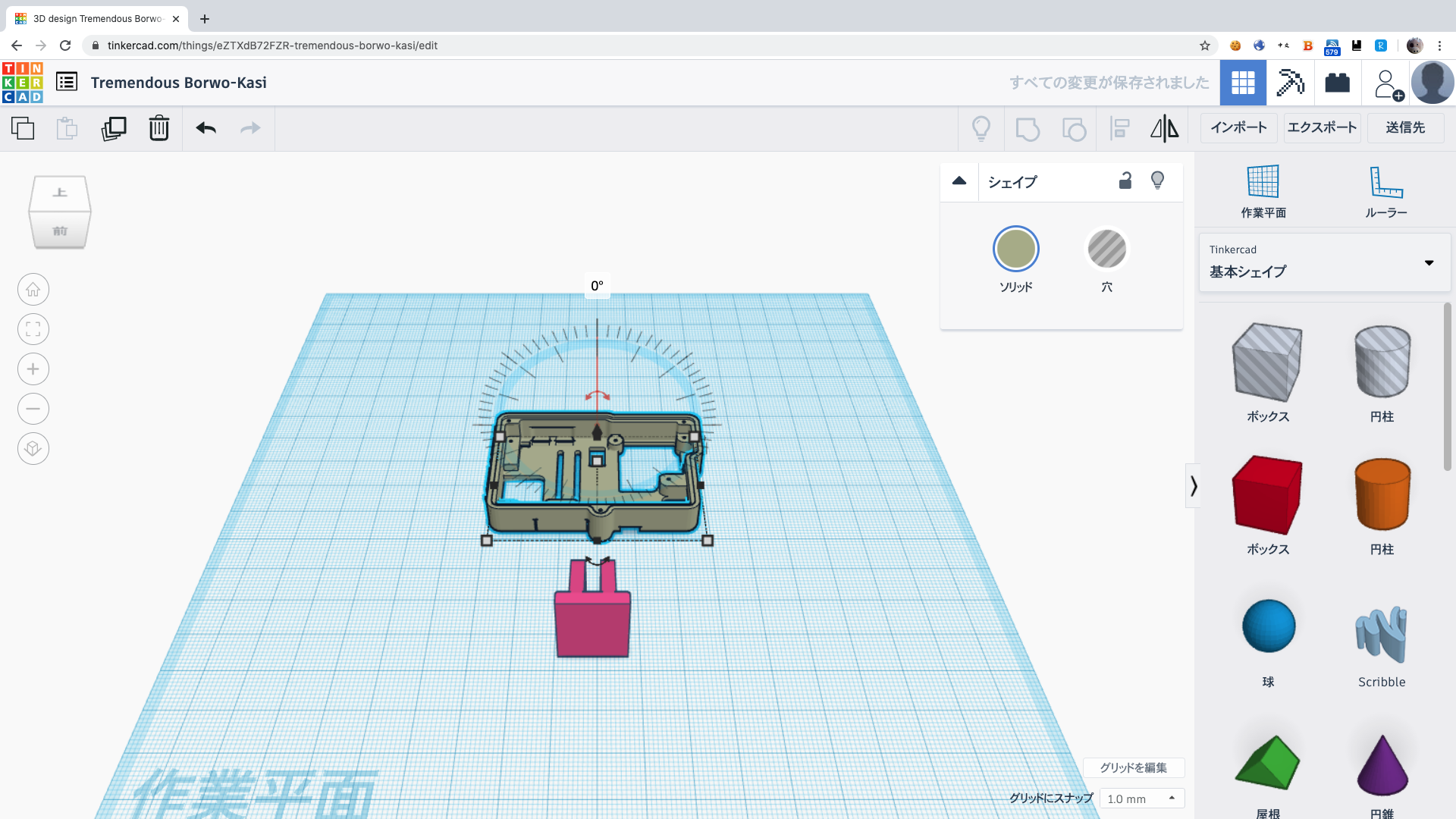
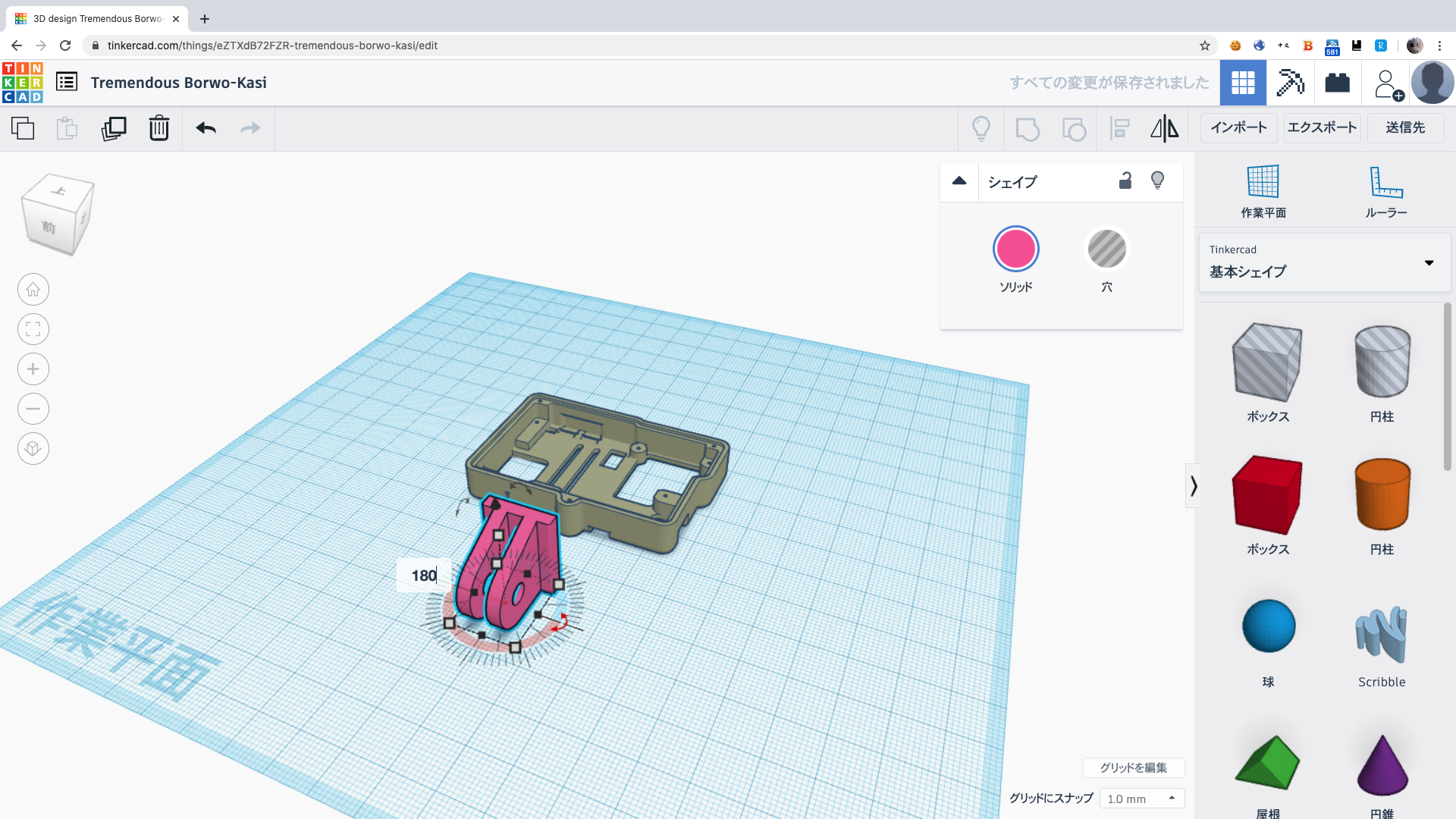
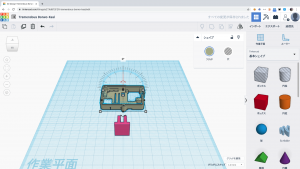
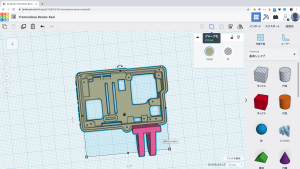
合成で一致する面を下側になるように、それぞれを180度回転させる。
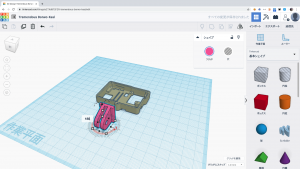
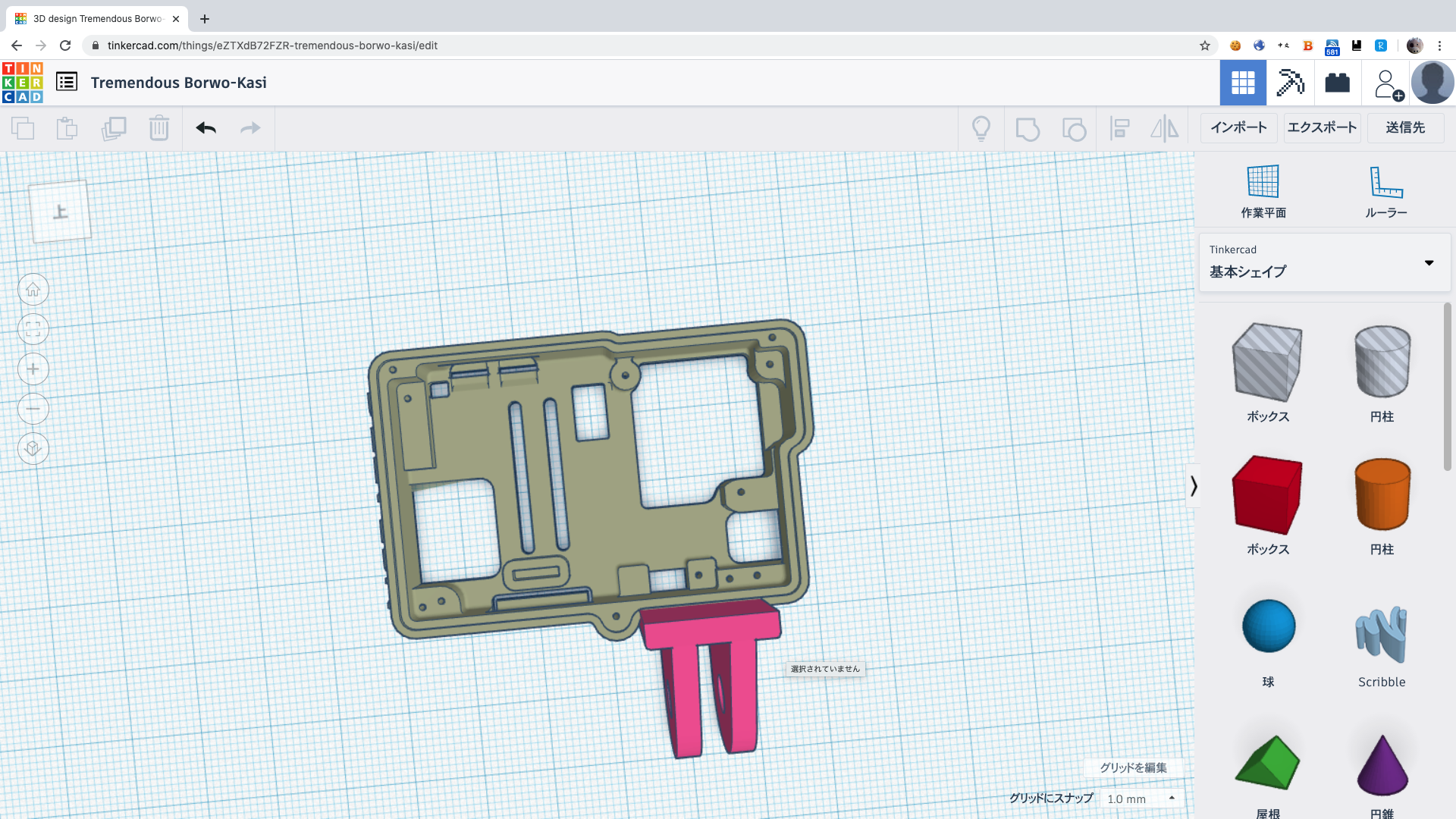
ドラッグして合体。
両方の図形を選択してグループ化によりひとつの図形にまとめる。
ひとつになった図形をSTLファイルでエクスポートする。
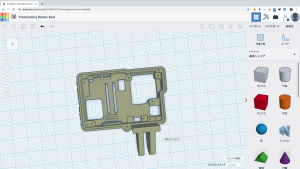
といった感じです。図形の要らないところを削ったりすることも出来ます。次のYouTube動画にそのあたりの解説もあります。
私の剥きプロの最初の目標は手持ちの自家製Beta85X HDをDison Miniにすることです。マウント方法の違う方法もありますが、まずはDison Miniを目指します。GoProの解体方法に大きな違いはありません。
[ Firmware 1.6 ]
Reel Steady Goをもっとも効果的に使用するために、まずはファームウェアをダウングレードします。必要なファイルは以下のYouTube動画の説明にリンクがあります。
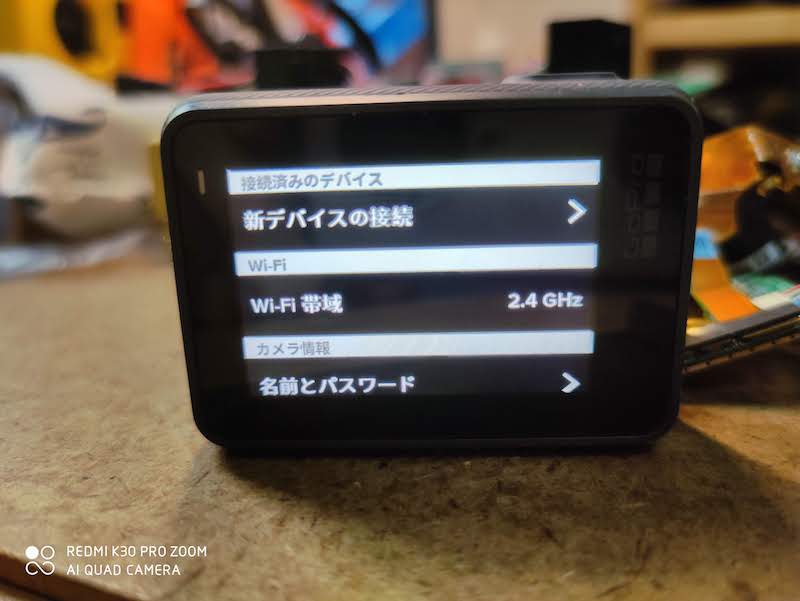
ファームウェアのダウングレードに続いて、携帯電話アプリケーションへの接続およびWiFi接続情報の記録も行っておきます。
2020/05/12追記) VTXとの干渉を防ぐためにWiFi設定を2.4GHzにした方が良いという情報もあります。逆に2.4GHzの操縦系統への影響があるかもという話しもあります。

2020/05/22さらに追記) やはり2.4GHzだと操縦系統(FrSkyを使用)に影響があるようです。室内テストでもGoProの電源を入れている時とオフの時であきらかにRSSI値に差があります。実際の飛行でもかなり近い場所でフェイルセーフに2回入りました。2回目のダメージがひどくてGoProの電源が入らなくなってしまいました。対策としてはWiFiをオフにして使用するかCrossfireに逃げるかですね。一人で飛ばすならば5.8GHzにして影響のないVTXチャネルを選んで飛ばすのも良いかも。
[ 分解 ]
この動画に従って行いましたが、いくつか私なりのコメントを書いておきます。
– レンズキャップの取り外し。押して回せと言っていますが、全然外れません。結局の所、大きなプライヤー(実際には5インチ機などでペラを外す時にモーターベルを掴むツールを使用)で掴んで回したら簡単に外れました。
– フロントカバーの取り外し。説明では5インチペラを使用していますが、柔らかいとのと幅が小さくてやりづらいです。PDAオープナー(PDAは死語かも)という専用ツールがあるとかなり速いです。

– バッテリーベイの取り外し。なかなか取り外せません。なんとも説明出来ませんが、いろいろとやっているうちに横に移動して取り外すことが出来ました。
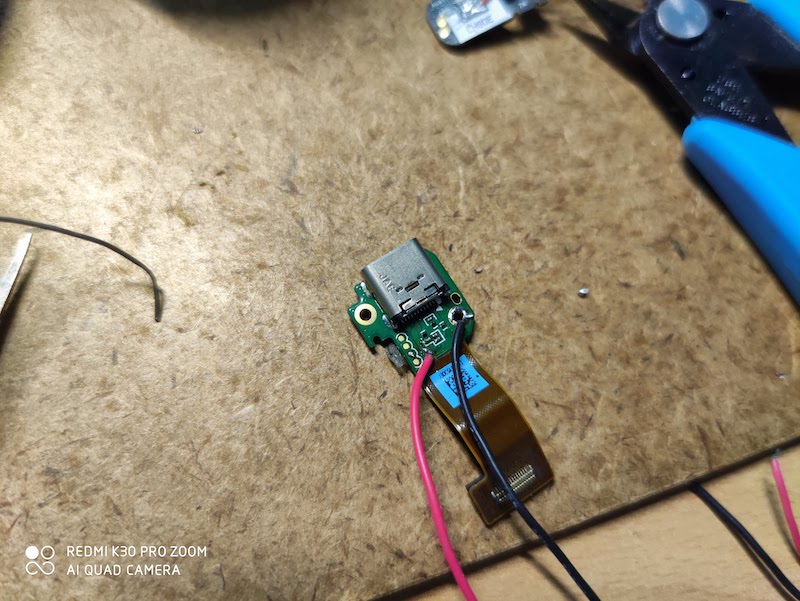
– 5V電源の改造まで説明されていますが、これに進む前に要考慮です。わたしは安全策としてUSB-Cコネクター上に5Vリード線を接続することにしました。
このあたりの詳細については概要編概要編に貼り付けてあるYouTubeビデオに詳しく書かれています。
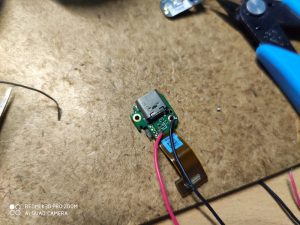
[ 電源ジャンパー ]
バッテリーを接続したら自動的に電源をオンにするためのジャンパーを行いました。

バッテリーコネクターの一番左はグランドです。ここでなくとも右上のネジ穴のところが近くて良いかもです。
次は機体への組み込みについて書く予定です。
ただいま、剥きプロ(Naked GoProをに挑戦中です。最初、ちらりと小耳に挟んだ頃は、GoProのガワを外してしまったら弱くなるし少し軽くなってもどうなんだろくらいに思っていました。それが実際の適用事例が目に入るようになって驚きました。TinyWhoopに搭載して軽々と飛んでいるではありませんか。これはやってみるしかありません。
細かい手順やノウハウはYouTubeやFacebookグループ(“Dison Mini CineWhoopDison Mini CineWhoop“と”NAKED Cinewhoop Community / GoPro – Insta360 and the others!NAKED Cinewhoop Community / GoPro – Insta360 and the others!“がオススメ)で探すことが出来ます。
使用するのはGoPro Hero 6 Blackの中古品です。あえてHero6を選択するのはReel Steady Goというソフトウェア・スタビライザーがもっとも効果的に動作するからです。ただし、これにはHero6がFirmware Version 1.6である必要があります。ほとんどの場合、中古品を購入後にダウングレードを行うことになります。ということで、以下の情報はHero6を念頭においたものです。
実際の改造に入る前に、その概要を掴んでおくのが良いでしょう。
[ 重量 ]
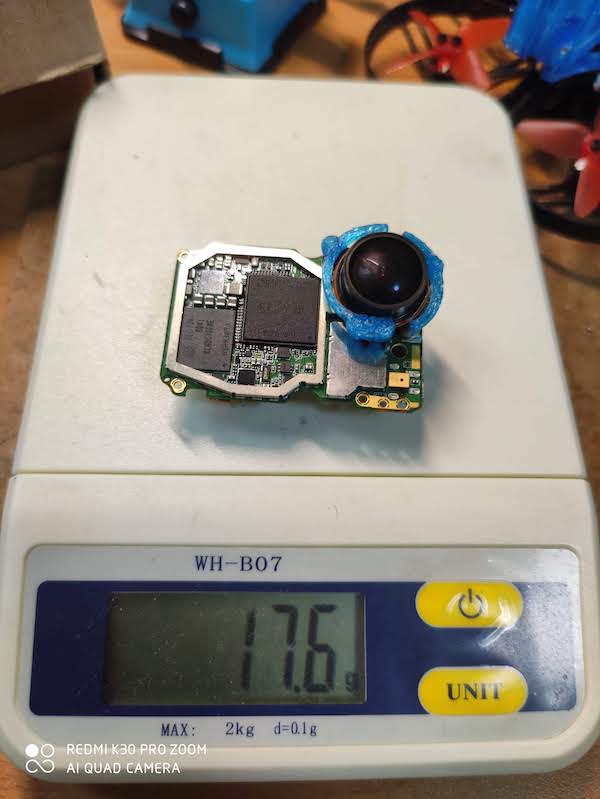
重量の軽減はバッテリーや液晶パネル、筐体を取り除いて実現しますが、2つのレベルがあります。表側の小さな液晶パネルを残こしカメラとメインボード含めて一体感を持ったまま計量化するものです。この状態で33gですのでオリジナルの116gに比べるとかなりの軽量化と言えます。2.5インチ機でも十分に飛ばせる重量です。さらに前面液晶パネルも取り外し、本当に録画に必要な部品だけにすると、なんと17gまで軽量化が可能です。ここまでくればTinyWhoopでの飛行も可能になります。

[ 電源 ]
バッテリーを外すのでドローンから電源を取ります。方法はいくつかあります。バッテリーコネクターに電源を供給する場合はバッテリーに内蔵されている小さな基板を取り外して利用しなければなりません。またバッテリーの電圧は満充電で4.4Vくらいなので5Vを供給してよいのかどうか迷います。もうひとつはUSB-Cコネクターから5Vを供給する方法です。 USB-Cコネクターを残しておいて電源だけを供給するためのUSB-Cケーブルを作って接続する方法、USBコネクターの基板あるいはメインボードに接続するフレキシ基板にワイヤーをハンダ付けして5Vを供給する方法、最後はやや細かいハンダ付けが必要とされますがUSB-Cコネクターは取り外してしまいメインボードに直接5Vを供給する方法です。
[ スイッチ ]
電源スイッチと録画スイッチ、それと動作が確認出来るLEDが付いたフレキシブル基板をそのまま使用するのが一般的です。それを使わない場合、スイッチの配線はメインボードから簡単に取れるので独立したスイッチを取り付けている例もあります。この場合、LEDはUSB-Cのボードを残していれば簡単に配線できます。メインボードからだとかなり細かいはんだ付けが必要となります。

また電源スイッチについてはメインボード上でジャンパーでショートさせると、ドローンのバッテリーを接続すると自動的に電源がオンになります。わたしはこの方法を取っています。そうすると、あとは録画ボタンを押すだけで良いです。
録画スイッチをFCのブザーポートに接続してプロポからコントロールするなどという技も存在します。
[ 設定など ]
背面の液晶パネルを外してしまう前に携帯電話アプリとの接続を完了しWiFiの接続情報を控えておきます。またReelSteady Goの使用を考えている場合でファームウェアが2.1の最新になっていたら1.6にダウングレードします。アプリからはダウングレード出来ませんのでSDカードを利用した方法を取ります。
次回は、具体的な「剥きプロ」手順を紹介する予定です。