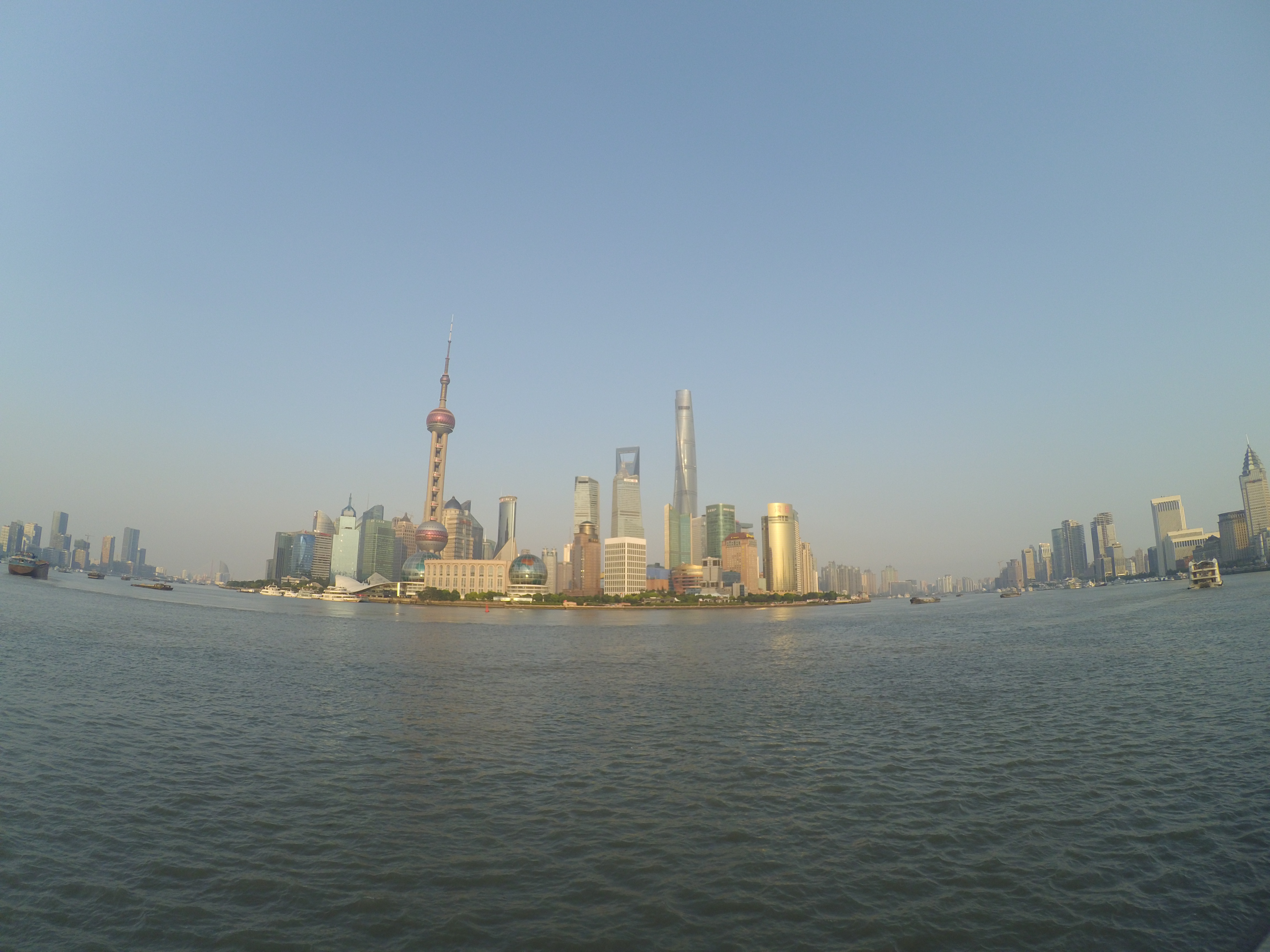
小米 YiCameraは155度の広角撮影を行うため画像が歪みます。これはこれで仕方のないことだと思っていましたが設定の中にLens rectification(レンズ補正)というものがありました。動画にも静止画にも同様に働きます。比較のために同じ位置で撮影した写真を紹介します。分かりやすいように直線の多いビルの内部の写真です。写真としては美しくなくて申し訳ないです。
YiCamera レンズ補正無し
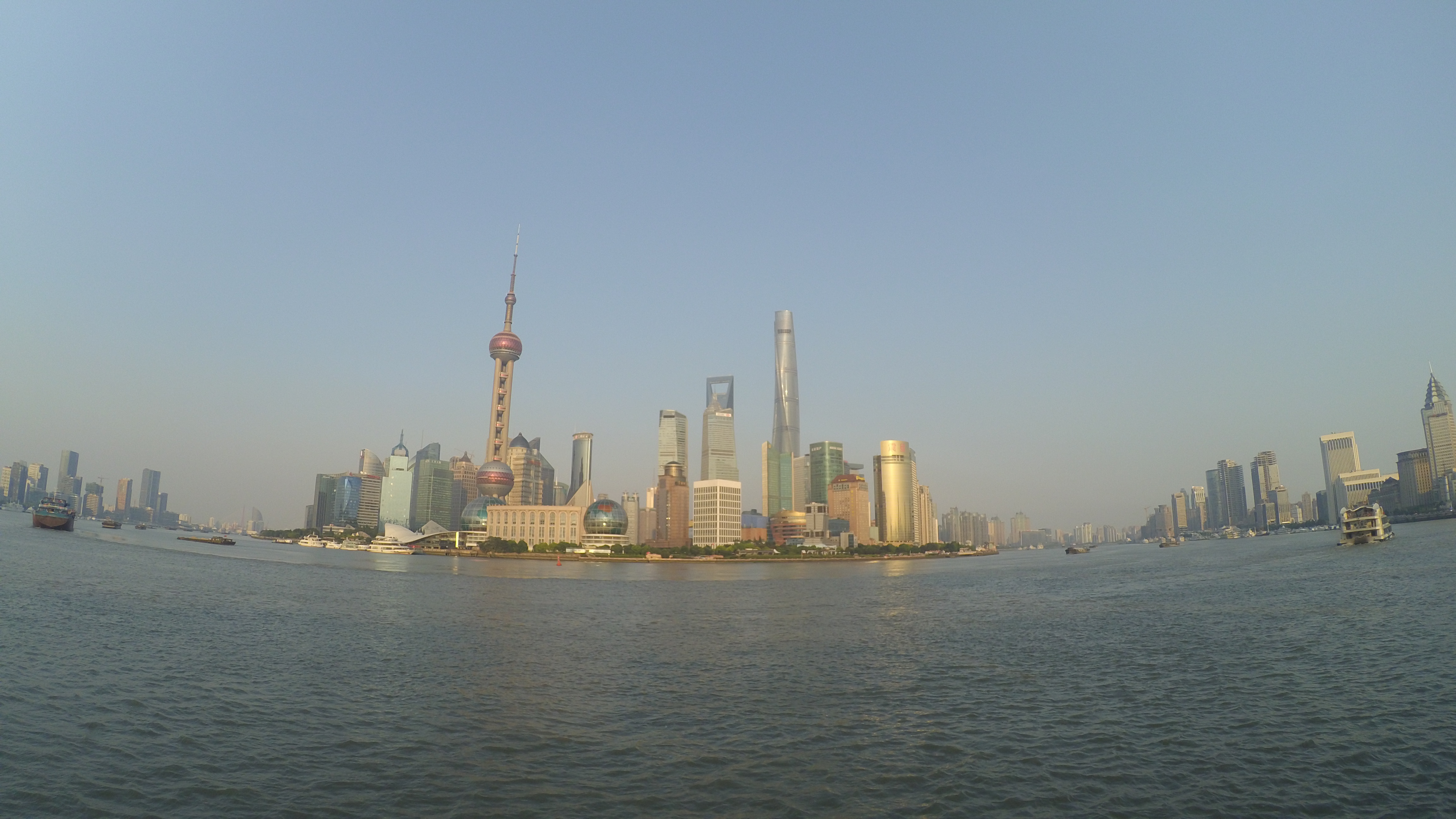
YiCamera レンズ補正あり
上がレンズ補正無し、下が有りです。ちゃんと機能しているようです。レンズ補正を行うと、やや画角が狭くなります。これは仕方ないことでしょう。左下の黄色いスリップ注意の立て看板を見ると分かるように不自然な部分も出てきます。あと何故か天井に付いているシーリングライトの光り方も変わってしまっています。なかなか微妙です。わたし的には補正なしで普段は撮影するかもです。
小米 YiCameraには特殊な撮影モードが幾つか搭載されています。動画では毎秒120とか240フレームのやや高速度撮影、静止画ではバースト撮影(一秒間に3, 5, 7コマ、あるいは2秒間に7コマの撮影)などがあります。
当然、タイムラプス撮影モードも搭載されています。そのタイムラプスのサンプルを紹介したいと思います。タイムラプスには2つの選択肢があります。カメラで動画を合成しMP4を出力するものと、単純にインターバル撮影を行いJPEGファイルで出力するものです。後者の場合、PC上で何かしらのアプリケーションを使用して動画を作成します。撮影インターバルは0.5s, 1s, 2s, 3s, 10s, 30s, 60sと豊富なバリエーションがあります。今回紹介するサンプルはどれも0.5sインターバルで撮影したものです。
VIDEO
YiCameraでMP4を出力してくれるモードで撮影したものです。出力の解像度は1920×1080になっています。そこそこちゃんと写っていますし簡単で良いです。携帯電話にダウンロードしてその場でSNSに投稿出来るのは魅力です。
VIDEO
YiCameraからは一連のJPEG写真として取り出してMac上でZeitrafferというアプリケーションを使ってQuicktime動画に合成しました。解像度は写真の設定のままの4608×3456になっています。画面一つ一つはYiCamera本来の静止画のクオリティを持っていて、それを時間をかけて動画に合成するのでかなり精細に画像になりました。
VIDEO
上海外灘の夜景です。これはYiCameraでMP4出力させたものです。解像度は上と同じく1280×480です。画質はかなり厳しくなりました。
VIDEO
上海外灘の夜景をJPEG写真としてタイムラプス撮影し、Zeitrafferで合成したものです。解像度は、その時の写真の設定である4808×2593になっています。MP4出力のものと比べて夜景では格段に画質の差が分かります。
静止画に続いて動画のサンプルを幾つか紹介したいと思います。
まずは動画の解像度は以下の通りです
1920×1080 60P 16:9
何故か横1920ドットでの4:3画像が無いので、ファイルサイズ的には1920×1080 60P 16:9が一番大きくなります(120Pとか240Pは除く)。120Pとか240Pで撮影するとスロー再生とか出来そうですがまだ試してはいません。良い題材に出会ったら試してみたいです。
上海外滩で撮影した動画を幾つか紹介します。音も入っていますが、風の音しか聞こえません。肉眼でもやや霞んでいる状態ですのでぼんやりした色になっているのは仕方ないと思います。
[ 1920×1080 60P 16:9 ] VIDEO
[ 1280×960 60P 4:3 ] VIDEO
[ 1920×1080 60P 16:9 ] 夜景 VIDEO
夜景での動画撮影はあまり得意ではない感じ。
アクションカムですし本来は動画を撮る物でしょうが、わたしは結構静止画も撮っています。かなり広角な画像が撮れることだけが利点と言えます。ちゃんとした綺麗な写真を撮る目的では使っていません。
静止画の解像度は以下の通りです。
16M(4608×3456 4:3)
センサー自体は4:3の大きさであり16:9の画像は上下をカットしたものになります。実際に使っているのは、ほぼ16M(4:3)か12M(16:9)です。もしかすると圧縮エンジンとかの都合で低解像度の方が調子が良い場面などもあるのかも知れませんが、そこまでは試していません。
以下、サンプルとしていくつかの写真を貼り付けておきます。何れもクリックすると未加工の写真が表示されます。
Shanghai Band YiCamera 4:3
おなじみの観光地、上海の外灘(バンド)で撮影したものです。肉眼でもやや霞んでいたので発色がぼんやりしているのは仕方なしです。
Shanghai Band YiCamera 16:9
上と同じアングルで16:9で撮影しました。上下ともにカットされているのがわかると思います。
Shanghai Band Night YiCamera 4:3
夜景もそこそこに写ります。右上に月も写っています。
Coffee Shop YiCamera 4:3
珈琲店の中で撮影したものです。風景よりこちらの方が私としては印象が良いです。
その他に特殊な撮影モードとしてBurstとというものがあります。これは連続的に撮影してくれるものです。3p/s(一秒に3コマ)、 5p/s、 7p/s、 7p/2s(2秒に7コマ)の設定があります。室内で試してみた限り、動くものだと被写体が流れてしまいます。動きのあるものをコマ撮りするものですが、シャッタースピードが速くはないので少々無理があるように思います。十分な光量があれば、また結果は違うのかも知れません。
歩きながら動画撮影するためにはスタビライザーが必要です。電動三軸スタビライザーが良いのは分かっていますが、本体よりも値段が高くなります。そこでダメ元で簡易式のスタビライザーを試すことにしました。
こんなパッケージで到着。見た目はなかなか良いです。説明書は中国語と英語で書かれています。
カメラを取り付けようとしたらGoPro Quick Releaseなるマウントになっています。マウントだけ、また購入かと思いつつ過去に購入したアクセサリーの付属品を調べてみます。ラッキーにも最初に購入した防水ハウジングにQuick Releaseマウントが付属していました。ということで、さっそく取り付けてみます。
ハンドルを持つと本体がグリグリと自由に動きます。重しを調整してバランスを取るように説明書に書かれていますが、これがなかなか難しい。また作りの問題も有って、すぐに首を振ってしまいます。水平方向の動きは実に軽いのですが、肝心な縦方向の動きが少し重いので、揺らしてみると直ぐに水平方向に首を振ってしまうのです。
説明書によると撮影時にはハンドルを握ると同時に指をマウントに軽く添えるように書かれています。おそらくは水平方向の動きは自分で抑制せよという事でしょう。
頑張って練習しながら試し撮りをしてみましたが公開できるような画像にはなりませんでした。お蔵入り決定です。そのうち気が向いたら別のスタビライザーを探してみます。
前回紹介した本物のカメラ用レンズフィルターが使えるアダプターは、少しだけですが画面の四隅がケラれます。ということで、別のものを探してみました。
プラスチックレンズですがクオリティは悪くないです。装着して写真を撮ってみましたが、未装着時と見分けはほとんどつきません。一応UVフィルターらしいです。
保護キャップが無いのが今ひとつ。やや大きめな適当な瓶のフタの内側にベロクロテープを入れて内径を調整。それを保護キャップの代わりにしました。
もうひとつ購入したのはクリップ式のマウントです。前回のヘッドマウントと同様にGoPro仕様のマウントに三脚ネジ・アダプターが付いています。ヘッドマウントの物も同じでしたがYiCameraをマウントすると三脚ネジの長さが余ってしまいます。そのため、軽い力で首を振ってしまいます。適当なワッシャーをかませてしっかりと固定する必要があります。
小米YiCameraのアクセサリー関連の情報です。流石に中国の小物メーカーは動きが早くて、あっという間に各種アクセサリーが市場に出回り始めました。
因みに本体には三脚用のネジ穴があるのでミニ三脚にダイレクトにマウント出来るのが便利です。(Heroは無いですよね?)
まずは防水ハウジングです。目的には2つあって、本体だけで剥き出しのレンズで使うのは忍びない(レンズはわずかに本体より飛び出しています)。ハウジングがレンズ保護になると思いました。もう一つはGoPro用のマウントアダプターを使うためです。防水性能は試してはいませんが、スイッチ類を押すためのプランジャーはとても良く出来ています。しかしながらプラスチックレンズですので歪みはないものの透明度がやや気になります。やはり、ほんとうに水に入る時に使うものであって常用するものでは無いです。
それではということで、本物のレンズフィルターを使うことにしました。37mm径のフィルターを取り付けるためのスリーブを本体レンズまわりにはめ込むだけです。単純に差し込んでいるだけですが、しっかりと固定されていて良い感じです。UVフィルターとのセットで購入しました。これを常用することにします。
追記) 実際の撮影前にブログ書いていました。ちょっと試してみてたら四隅が少しだけケラれます。うーむ、のまた別のやつを物色するか、、、
これはヘッドマウントです。まだ装着はしたことはありません。ドローンの飛行時に両手フリーで撮影するために用意しました。これもGoProタイプのマウントに三脚ネジのアダプターが付いています。アダプターは使い回しが出来そう。ネジが微妙に長くて(あるいはYiCameraのネジ穴が浅い)、しっかり止まらず首を振ってしまいます。適当なワッシャをかませて固定できるようになりました。
別のマウントアクセサリーも物色中です。
GoPro Heroもどきとも言える小米のアクションカムYiCameraです。私自身は、これが初めてのアクションカムですのでGoProなどとの比較は出来ません。淡々と使い勝手などを書いてみます。
[ アプリケーション ]
細かい設定や操作にはスマートフォンが必要になります。専用アプリケーションはAndroidとiOS用があります。残念ながらiOS版は、わたしのiPod Touchで試した限りではライブビューに時差が発生しているので実用的では無い気がします。iOS版は公開されたばかりですので今後改善されることを期待します。わたしはAndroid版のアプリケーション を使用することにします。
アプリケーションからは写真やビデオの解像度を変更したりライブビューを見ながらの撮影。撮影した写真やビデオを見たり、ダウンロードすることが出来ます。ビデオの再生は解像度やフレームレートが低いものはストリーミング再生も可能です。
[ 説明書 ]
中国国内で購入したためかも知れませんが本体に付属していた説明書は中国語のみでした。同じ説明書の英語版がAndroidアプリケーションに内蔵されています。
[ 単体操作 ]
電源投入後に電源ボタンを押すことにより写真モードとビデオモードを変更出来ます。ビデオカードになっている場合、複数あるStatus LEDが点灯することにより確認できます。解像度などの変更は出来ません。
[ 起動時間 ]
単体で撮影可能になるまでは10秒弱でした。WiFi接続が可能になるまでは30秒弱。実際にAndroidから接続を試してみて、ライブビューが出るまで最速で35秒ほどでした。
[ その他 ]
メモリーカードは付属していません。自分で用意したSanDiskの64GBマイクロSDカードを入れました。本体の充電はUSBで行います。USBは充電だけではなくPCに接続するとメモリーカードがマウントされるので写真やビデオの取り込みにも使えます。
アメリカ出張の時にAT&T GoPhoneとしてSIM付きで購入したLumia635、SIMロックがかかっているのでWindows Phone 10を入れたりして実験用に使っていました。別の端末が動かなくなったこともありSIMアンロックを行って使用することにしました。
まずはWindows Phone 10から8.1に戻しました。Mirosoft公式ツールであるWindow Phone回復ツールではうまくリストア出来ずLumia Software Recovery Toolを使用して8.1に戻しました。
SIMアンロックはアンロックコードをネット で購入しました。約3日でコードが到着しました。往々にして待たされる事が多いので上出来です。
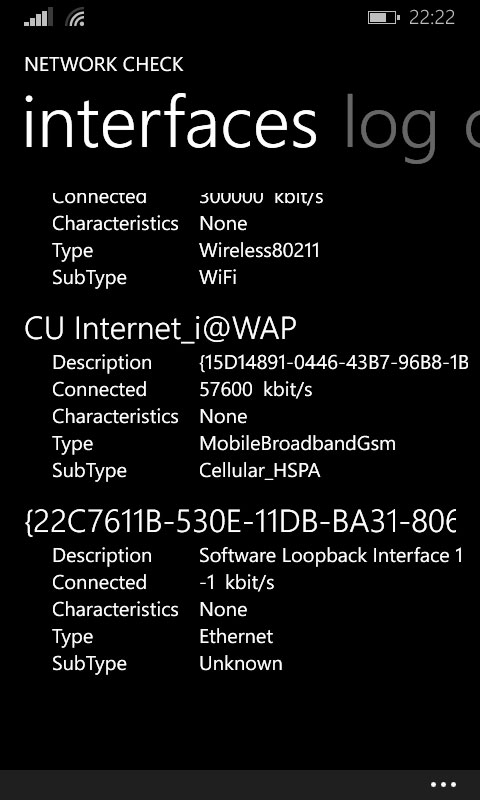
China UnicomのSIMが認識出来ました。Lumia 635はLTEもサポートしており、どこかでみた中国のLTEバンドと一部重なっています。ちょっと期待したのですが、残念ながら今のところ3Gでしか動いていないようです。画面表示の4GというのはAT&Tでは3.5Gの事で、あてにはなりません。最初スピードテストを行いLTEで動いているかもとSNSに書き込んだのですが香港の山根さんに3Gかもと突っ込まれ、さらにテストを重ねた所スピードテストの結果にばらつきがあり今ひとつ信用出来ない事が分かりました。山根さんによるとダウンロードが調子よくても3.5Gだとアップロードが全く速度が出ないので判別出来るとのことでした。全くその通りでした。後から思い出したのですがアメリカに居る時はLTEと表示されていたと思います。
Lumiaはネットワーク関連の情報や設定項目が少ないのでアプリケーションを探したところ幾つかのアプリケーションで以下のような情報が得られました。SubTypeの表示を見るとやはり3Gみたいですね。
家人のiPhone 5sで掴んでいるバンドが調べられることを思い出して自宅での4Gバンドを調べたところB3でした。残念ながらAT&T Lumia 635はB3は使えないのでした。3G SIMを入れてルーターとして使用するので、まあ問題は無いです。
Moto X Pro (Nexus 6中国版)はGPSの感度が良くて大満足だったのですが、ある時からとてつもなく不調になりました。現象はざっと、こんな感じ。
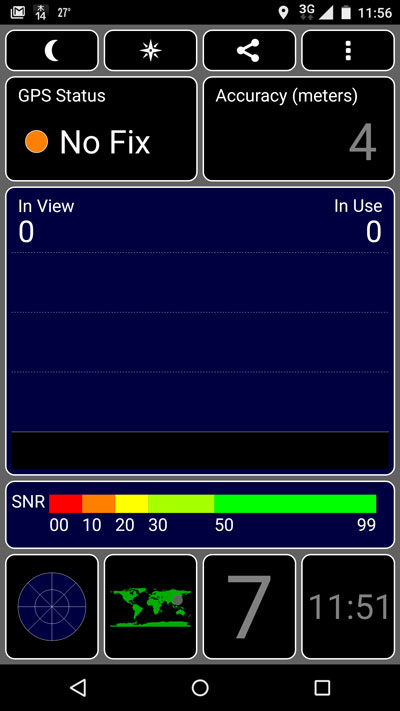
– GPS衛星がつかみにくいとかではなくて、まったく見えない。GPS Testというアプリで見ると、こんな感じ。A-GPSの効用かどうかは知りませんが、普通は衛星電波がまったくない状態でも衛星の番号とか位置が表示されます。それがまったく何も情報がない状態になります。
– 時折、位置情報が取れるようになるが、ほどなくして上の状態に戻る。
Cacheパティション消去したり、最後に導入したアプリケーション削除したりと2週間ほど頑張りましたが解決しなかったです。問題発生時は香港のChina UnicomのSIMを入れていましたが、それを中国のChina Unicomの4G SIMと入れ替えたあとは全く問題が発生していません。SIMを戻しても問題なしです(実際にはSIM戻し+APN変更)。どうなっているのでしょうね?
といったことを上海のIngress同志(違った、敵陣営だ)とSNSで会話していたら、これじゃねとGoogleに上がっているIssue 81140 を教えてくれました。Oh I am not aloneですが、どうも解決策がないというか確定した再現方法が無いようです。GPSの掴みが悪いという現象自体はコードのバグ以外にも普通に存在するのでIssue 81140の全ての記述がバグに繋がっているかどうか怪しいので心して読んでください。
もし同様の問題に出会ったら、可能ならSIMを入れ替えてみる。あるいはAPN設定でAPNタイプにagpsを書き加えるあたりが今のところ有効なおまじないみたいな気がします。