Parrot Bebopで発生するハードウェア障害の代表的な2つの問題に対して過去の経験と見聞を元にまとめた問題解決方法です。
This is problem determination procedure for two typical hardware problem of the Parrot Bebop based on my experience and other user’s information.
1) Moto related error messages, モーター関連エラーメッセージ
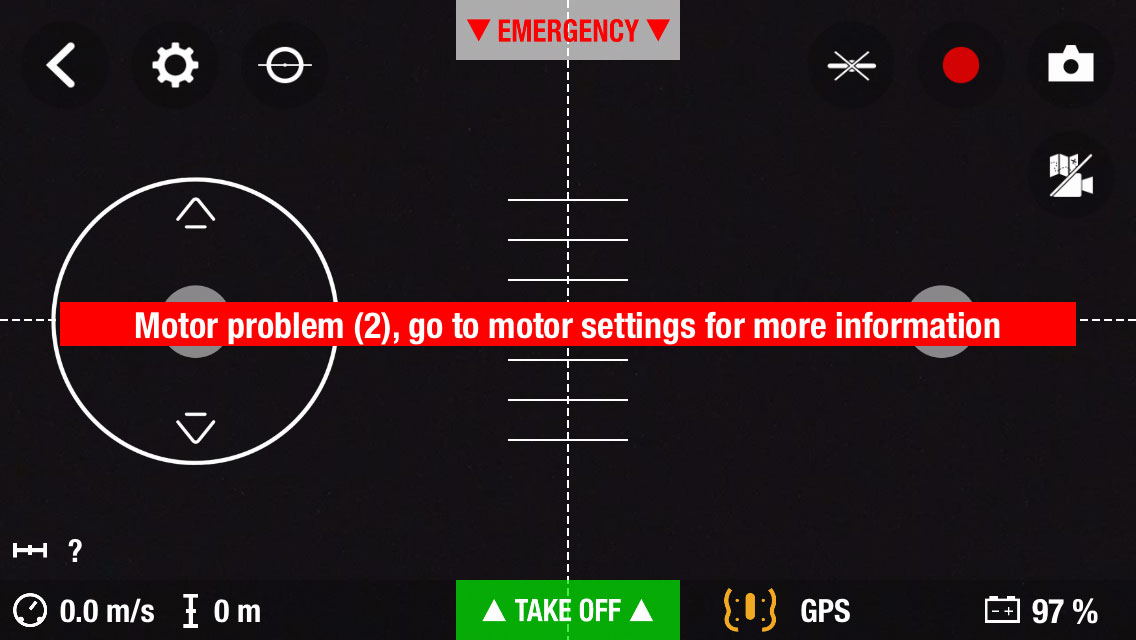
エラーメッセージの詳細にはmotor stalledの他にmotor stage brokenなども見られます。これらのエラーが出た場合は、例え一時的に回復したとしても飛行を継続せずに問題を解決することをお勧めします。障害が飛行中に再発すれば、そのまま墜落してしまう可能性があります。
You may see ‘motor stage broken’ in detailed screen also. If you get the motor related message once, I do recommend you to figure out the problem before next flight. If the problem happen during flight, the Bebop would be crashed.
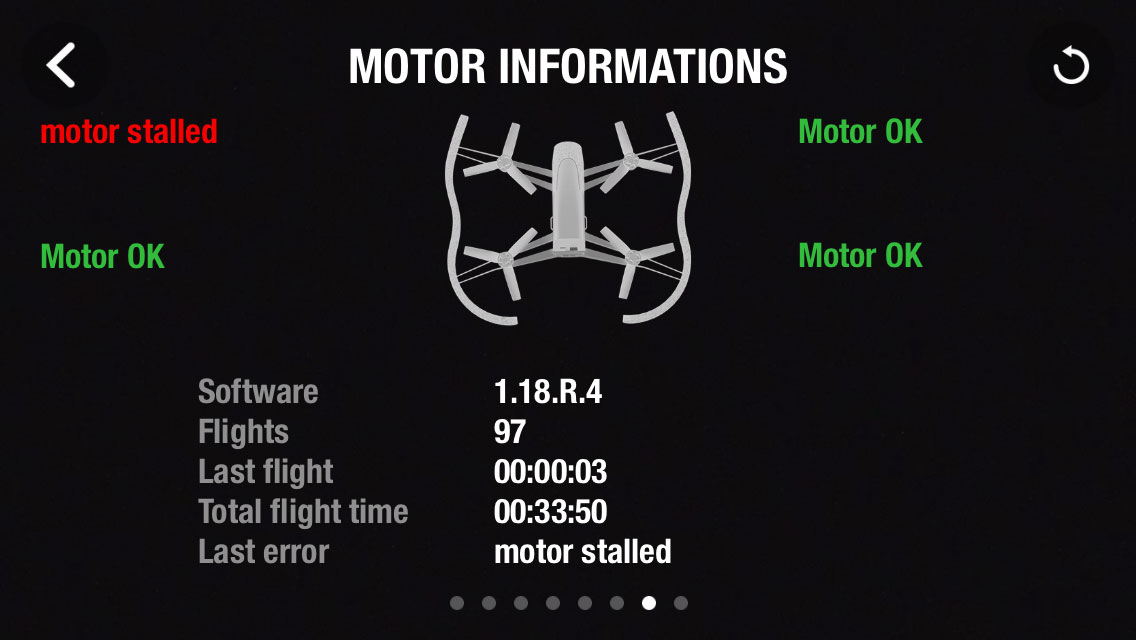
過去の事例を列挙すると、
– メインボードに接続する部分のコネクターの緩み
– コネクター部分での断線
– モーター内での断線
などが見受けられます。メインボードの故障も考えられますが、まだ聞いたことはありません。もし問題が必ず発生する場合はモーターのコネクターを入れ替えてモーター側に問題があるかメインボードに問題があるかを調べることも出来ます。
The problem most likely caused by;
– Connector at main board is loosened
– Wire at the connector is broken
– Wire in the motor is broken
There is small possibility of main board problem, but I have never heard about main board problem yet. If the problem is solid failure, you may swap the motor connection with other motor to determine the problem resides in motor side or main board side.
2) Jello Video Effect, 動画撮影における揺らぎ
これも良くある問題です。異常な小さな振動がビデオに影響していると考えられますが、原因は様々です。もし墜落などがきっかけで発生した問題では無く保証が効くのであればい場合はParrotに修理を依頼するのが良いでしょう。
Jello video effect is also one of typical problems on the Bebop. Small unusual vibration of the Bebop may effect the video, however there are many possibility for root cause. If the problem was not caused by crashes and Parrot warranty is still effect, you should ask Parrot for the repair.
自分で問題判別する場合、まずは飛行姿勢が安定しているかどうかを見てみます。部屋の中あるいは無風でもホバリングが安定しない場合は、まずそれを直さなければなりません。おもな原因は、
– 下向きカメラのコネクターが緩んでいる
– モーターの取り付けが緩んでいる
– モーターシャフトが曲がっていて回転が安定していない
– モーターの不良
– ブロペラが破損している
– フレームが割れている
– フレームと本体の開いだのバンパー(ゴム製部品)が欠損している
などなどです。一見、飛行が安定していても上のどこかに原因があるかも知れません。
飛行が完全に安定している場合は、
– カメラの固定ネジが緩んでいる
– カメラ自体の内部に問題がある(わたしの場合はこれでした)
などが考えられます。
If you need to perform problem determination on the jello video issue, you may need to check the Bebop flight is stable or not. If hovering is not stable indoor or no window condition, you need to fix the unstable flight. It would be caused by;
– Lower camera connector is loosened
– Motor mount screws are loosened
– Motor shaft is broken
– Motor problem
– Propellers are broken
– Lower frame is broken
– Bumpers between lower frame and main body are broken
Even if the flight is stable, still Bebop may have above issues.
If the flight looks perfectly stable;
– Camera mount screws are loosen
– Camera itself has a problem (I experienced this. I changed a camera module and fixed the my jello video effect)