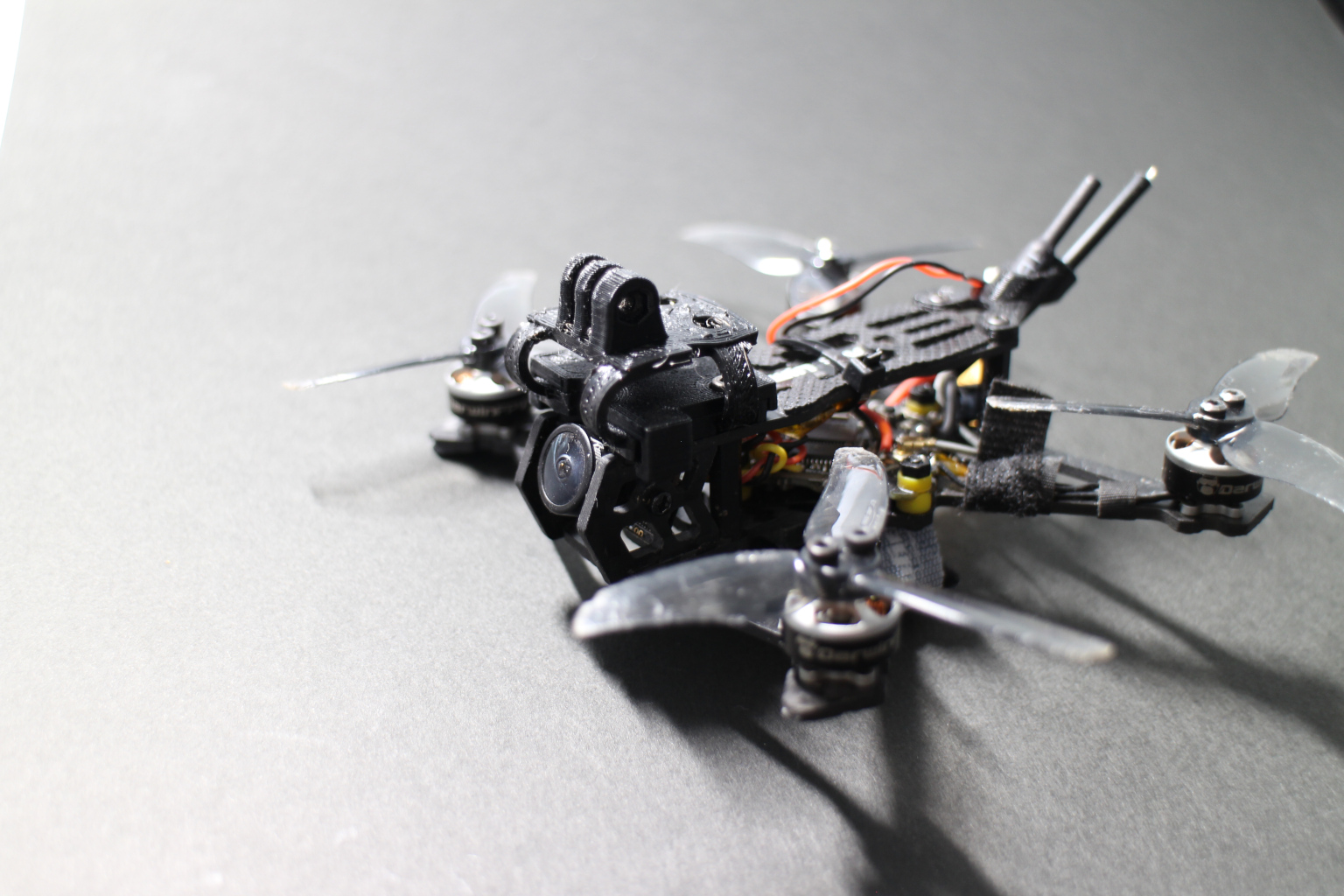
Insta360 GO 3のカメラ本体は小型でFPVドローンに搭載するのに適しています。ただし初代Insta360 GOに比べるとだいぶ大きくなり、重量も35gほどあり超小型のドローンには少々重くなっています。
そこで試しに100g未満の2S FPV機に載せて飛ばしてみました。重さは感じますが、慣れてしまえば軽いアクロバティクな動作も可能でした。ということで、GO 3をFPV機に載せて撮影する時のわたしの設定や気がついた事柄をつらつらと書いておきます。
[ ビデオモード ]
動画の撮影には二つのモードがあります。撮影時に縦横比やスタビライズの掛け方を決めておく「動画」、撮って出しが可能な簡便な撮影モードです。もうひとつは「FreeFrame動画」で初代GOからある縦横比もスタビライズも後から携帯電話アプリもしくはPC上のアプリで決定を行うモードです。これはカメラのセンサーをフルに活用し真四角くかつ丸い動画を記録します。四角で丸いという意味は下の写真をご覧ください。これをアプリケーションで加工します。最近の流行りの縦長動画も後から作れます。またスタビライズは同時に記録されているジャイロデータを使用します。スタビライズの掛け方も後から選択できます。
FPVドローンではFreeFrame一択とわたしは考えます。

[ 録画可能時間の謎 ]
わたしのGO 3は64GBモデルです。これで実際のところどれくらいの動画が撮影できるのかが気になるところです。本体のプレビュー画面の左上に残り時間らしきものが表示されています。そこにはFreeFrame動画の場合は1h37mと出ています。FreeFrame動画もプレビュー画面で縦横比、解像度、フレーム数を選択することが出来ます。ところがどの設定を選んでも残り時間が変わりません。そこで実験です。
[ FreeFrame動画の実験 ]
まずは1440P/50FPSにして実際に録画をしてみたところ1時間35分ほど録画出来ました。表示されていた残り時間は正しいようです。次に各設定で録画したデータの検証です。結論から言うと、どの設定にしてもビットレートは約80Mb/sと変わりませんでした。つまりストレージの消費は設定に関わらず同じですので残り時間が同じになるのは当然です。
もう少し掘り下げてみます。画面上の選択肢は三種類あります。縦横比が16:9と9:16です。これはプレビュー表示の変更だけであることは容易に想像出来ました。解像度は1440Pと1080Pが選択できますが、実際に録画されたデータを検証するとどちらも2688×2688の動画になっています。動画を再生してみても差があるように思えません。もしかすると将来的には差が出るような計画なのかもしれません。フレームレートは50, 30, 25, 24が選べます。これは正しく録画されたデータに反映されていました。ただしビットレートはどれも同じです。画質に差が出ているかテストしてみましたが、ほとんど同じに見えます。1440P 50FPSがやや荒いようにも感じますが、ほぼ気のせいレベルです。静止した対象物でのテストしか行っていませんので、動きがある場合は何か違う可能性もあります。とりあえずは好みのフレームレートを選択すれば良いと思います。もしかするとこれも将来のファームウェア更新で変わってくるのかもしれません。
[ ISO/シャッタースピード/WB ]
お手軽撮影が売りのInsta360 GOシリーズですし、ISO, シャッタースピード, ホワイトバランスを自動で撮影しました。私的には概ね問題無しです。
木陰を通り過ぎる時にじわっと画面の明るさが変化しています。GoPro Hero6で同じことをすると急激にかくっと感度が変化してしまうと思います。それを経験して以来、GoProではISO固定で使用していますので、最近のモデルで何か変わったかどうかはわかりません。
じわっとした感度変化も嫌う場合はISO, シャッタースピードを手動設定するしかありません。プレビューが簡単に出来るので手動でも失敗がないのは大きな利点です。
[ スタビライズ ]
Gyroflowを使用しています。同期ポイントの手動設定は必要ありません。FOVやスタビライズの強さなど自由に変更出来るのが魅力ですが、規定値のままで問題無しです。画面の補正はリニアな感じになります。縦長の動画やワイドレンズっぽい湾曲した画面が欲しい時にはInsta360 Studioを使用すると良いでしょう。
[ カラー・プロファイル ]
シーンに合わせた多彩なフィルターが用意されていますが、わたしはFlatを使用しています。これは画像編集ソフトで色の調整が必要になります。どのLUTを使うべきか情報が見当たりませんがCaddx Peanutと同様にInsta360 X2用のLUT、ONE-X2-LUTを適用すると良い感じにノーマライズされます。X3-LUTでも良いかもしれません。X2用もX3用も、どちらもほぼ同じに見えます。
LUTファイルはInsta360のダウンロードページにあります。
[ アクションポッド ]

液晶の付いたポッドは特別なことをしなくても常にカメラ本体と接続されています。ドローンを離陸位置にセットしてからポッドでプレビューを確認し録画をスタートする。また着陸したらポッドから録画を停止する。という使い方が出来ます。FPVドローンの使用シーンにおいて完璧なリモコン装置です。
[ 風切り音 ]
動画の中にプロペラ音を取り込むのが好きなので録音機能が搭載されているのはとてもありがたいです。
音声設定は3通りあります。「風切り音低減」「ステレオ」「方向性強調」です。「風切り音低減」を使用したところ、今まで試したどんなHDカムより優秀でした。ほぼ風切り音のない動画が出来上がりました。
[ NDフィルター ]
購入時にはレンズ保護のための透明なフィルターが装着されています。まだ公式なNDフィルターは発表されていないと思います。サイズ的にはCaddx Peanut用のNDフィルターが装着可能でした。ただし、このNDフィルターは色温度が変わってしまうことが分かっています。当面、NDフィルターは使用せずに撮影することにします。
[ マウント ]

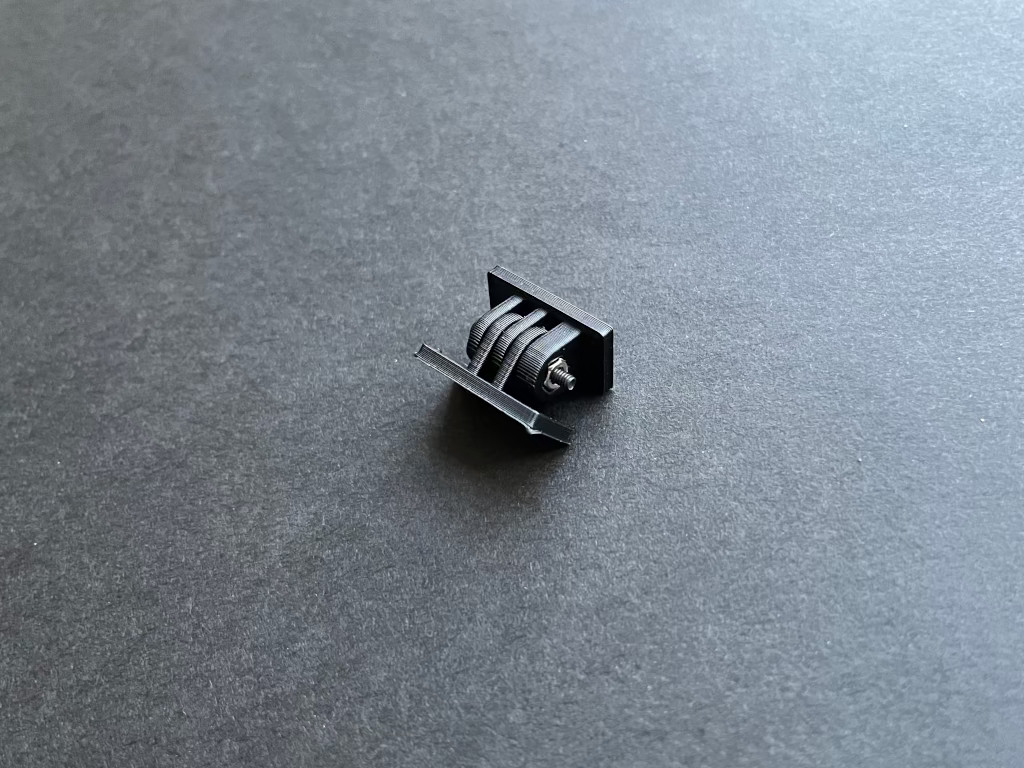
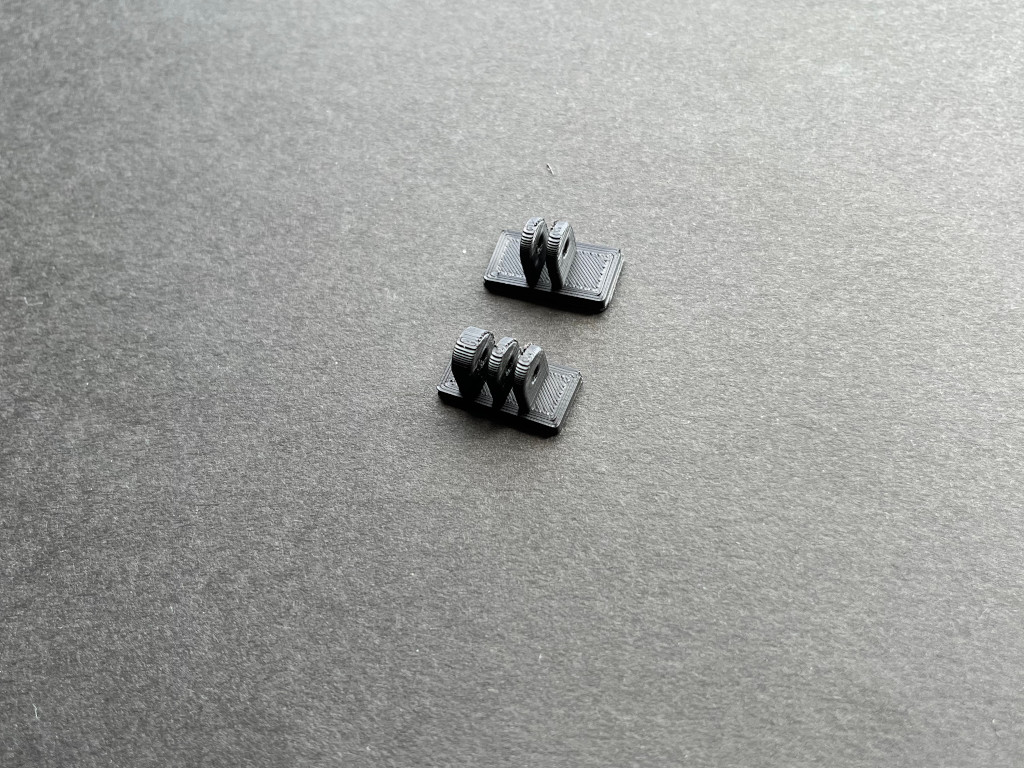
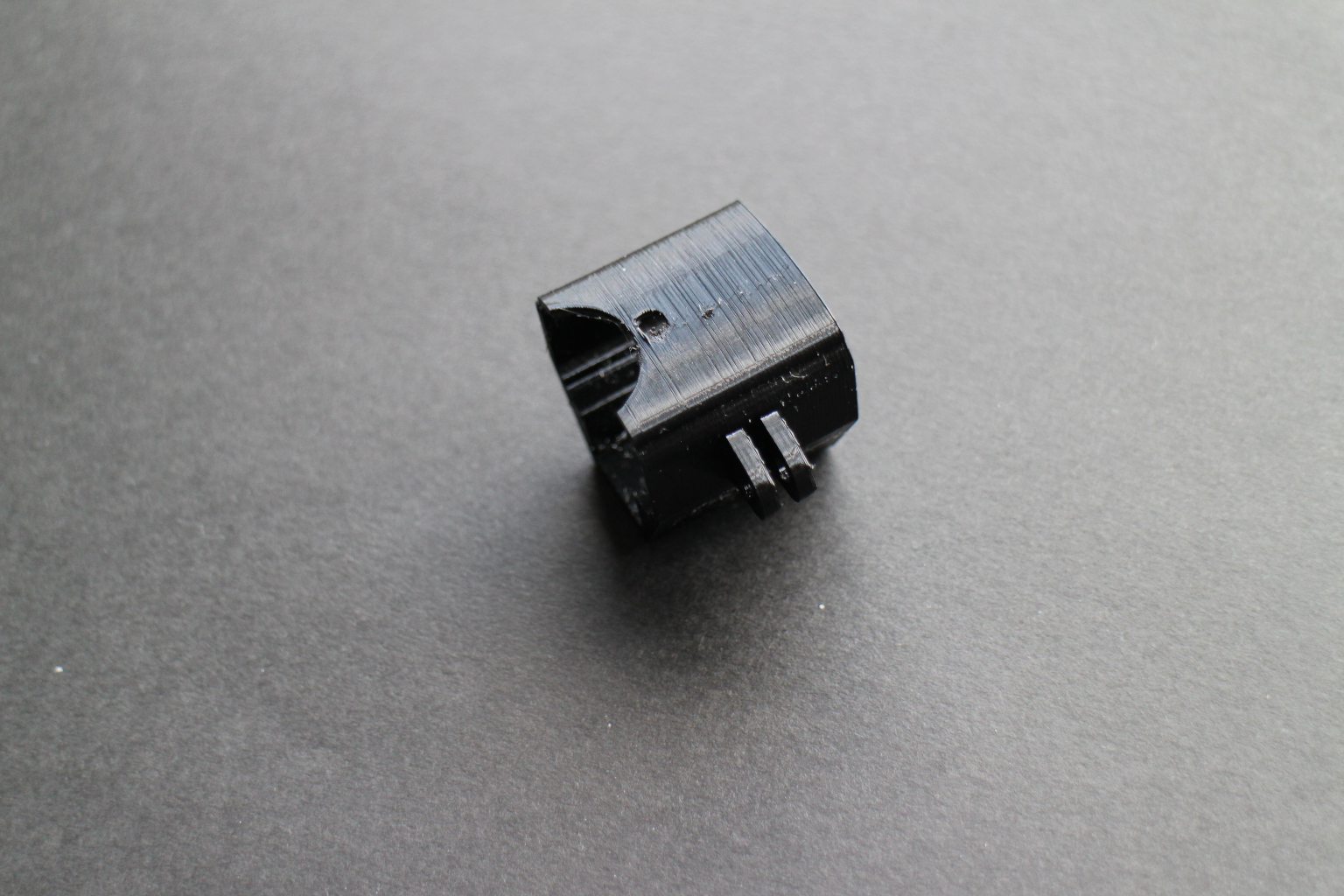
Insta360 GO 3マウント(GoPro互換)

Insta360 GO 3マウント(RunCam Thumb Pro共通)