日本に来てから低調なドローン生活が続いています。色々と面倒なことが多すぎて、屋外飛行は100g未満の機体で遠慮がちにたまに飛ばす程度になっています。これではいかんと言うことで、飛ばす場所の許可とかは別としてとりあえずはDIPS2.0を使えるようにしたいと思いました。しかし噂通りで一筋縄ではいきません。わたしが悩んだポイントについて書いておきます。
[ 前提 ]
私は数機のFPVドローンとDJI Sparkを2022年6月に古いDIPSシステムにて、リモートID無しで登録済みです(登録料を支払い登録記号をもらった状態)。
[ DIPS 2.0での飛行許可・承認申請 ]
機体は登録済みなので飛行許可の申請は機体以外の情報が必要なのだろうと思ったらさにあらず。ここから長い修行が始まります。途中挫けそうになってツイートすると、みなさん苦労されているようで助けていただけました。
これから説明する手順はすべてDIPS2.0トップメニューの「飛行許可・承認へ」ボタンから始まります。
– 「無人航空機情報の登録・変更」を見ると2022年に登録した機体が一覧に表示されるので一安心。
– 次に「操縦者情報の登録・変更」です。操縦者情報の登録は難しくはありませんが、操縦者と登録機体を紐づけるための機体登録です。DJI Sparkは簡単に登録できましたがFPV機を登録しようとすると「機体情報の登録が完了していません」と表示されました。

– 自作機、準自作機の場合さらなる情報登録が必要なようです。ということで、「無人航空機情報の登録・変更」に入ります。
– 機体の編集に以前に登録した時の情報が表示されますが、それ以外に多数の入力項目があります。これらを埋めていかなければなりません。
– 「Ⅴ.基準適合性に関する情報(一般)」と「Ⅵ.基準適合性に関する情報(遠隔操作関係)」はだいたいの場合、すべて”適”で良いと思います。
– 「Ⅶ.基準適合性に関する情報(自動操縦関係)」は全て”該当せず”にしました。
– 「Ⅸ.機体仕様に関する資料提出」には前、横、上から撮影した写真を添付。
– 「Ⅹ.操縦装置に関する情報」にはプロポの名称、メーカー名と写真を添付。
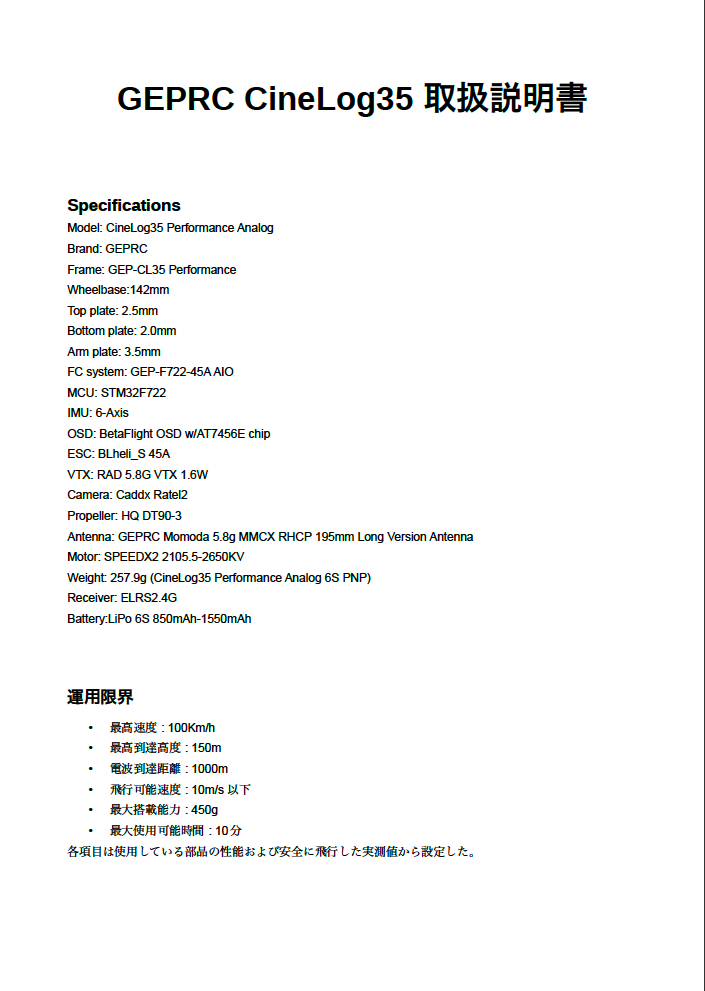
– 「Ⅺ.機体の運用限界に関する情報」、最初は”取扱説明等に記載は有りません”にしましたが、どうもうまく審査を通らないようです。そこで各数値を自分で定義した数値で埋めて自作の取扱説明書を添付することにしました。


– 「Ⅻ.飛行させる方法に関する情報」についてはプロポのモードを選択しただけです。
以上で無人航空機情報については完成です。
次はやっと飛行許可・承認の申請です。飛行方法、飛行場所については難しいことはないと思います。ポイントだけ列記しておきます。
– 「飛行の方法の確認(航空法第132条の86第2項関係)」はFPV飛行ということで”目視外飛行”を選択しました。
– 「飛行リスクの緩和措置の確認」は”補助者を配置する。”を選択しました。
以上でカテゴリー判定が行われ「カテゴリーⅡA」の申請に進みます。
– 趣味のFPVということで最初の方は簡単に選択可能です。
– 「V.飛行する場所はどこですか?」は”特定の場所・経路で飛行する”を選択しないと先に進めません。
– 「Ⅰ.飛行場所」の住所は細かいところまで指定しないといけません。私の場合は番地まで記入しました。地図の編集はややわかりにくいところもありますが、やっているうちになんとかなると思います。
ここからまた機体の情報を追加する必要があります。
– 「Ⅰ.機体情報一覧・選択」で登録済みの機体を選択します。
一覧に機体の情報が表示されます。一覧表を右の方に行くと「追加基準」というボタンがあるので、それを押してさらに情報を入力します。
– 「4-1.自動操縦システムを装備し、機体に設置されたカメラ等により機体の外の様子を監視できること。」は”機体に設置されたカメラ等により機体の外の様子を監視できる…”を選択し下の写真を添付。

– 「4-2.地上において、無人航空機の位置及び異常の有無を把握できること(不具合発生時に不時着した場合を含む。)。」は”その他”を選択し説明として以下の文章を記入。
FPV画面にて電圧および機体の異常について確認できる。位置についても画像より判断できる。
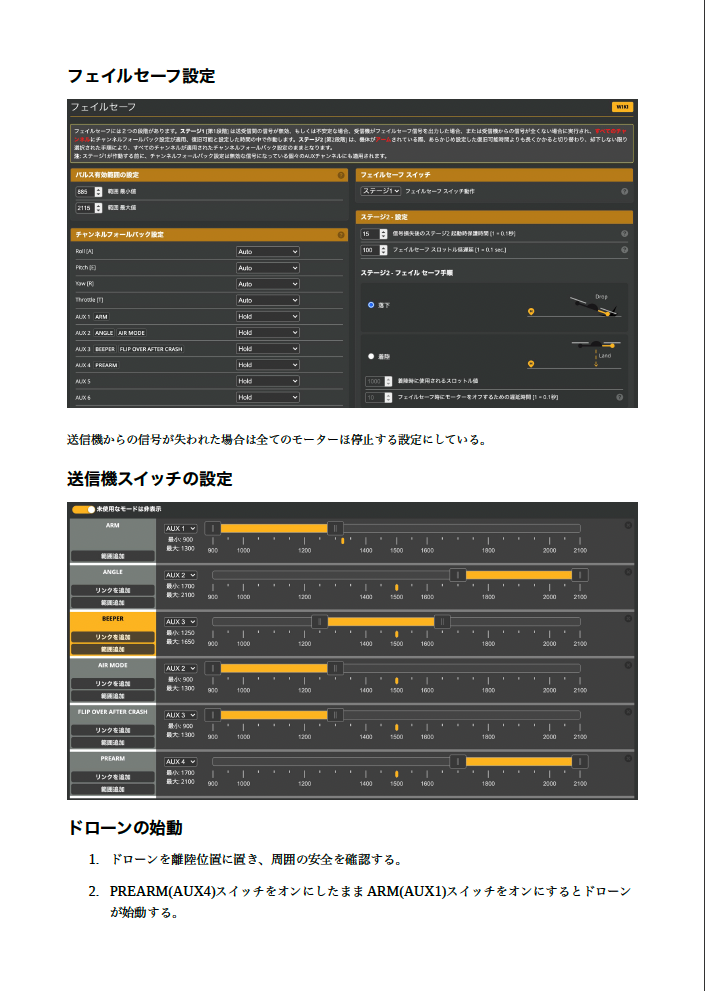
– 「4-3.不具合発生時に危機回避機能(フェールセーフ機能)が正常に作動すること。」は”電波遮断時にはフェールセーフ機能(自動帰還機能、電波が復帰するまで空中で位置を維持する機能等)が作動することを確認している”を選択しました。
あとは操縦者を選択します。マニュアルは航空局標準マニュアル01を選択しました。
最後に保険については、ドローン事故もカバーできる損害賠償保険の情報を入力して終了です。
[ 補正指示 ]
内容に不備や問題があるとメールにて補正指示発行通知が出されます。指示に従って内容を訂正して再申請します。一点、わかりにくいところがあります。機体の情報を変更した場合、それだけでは申請に反映されないようです。飛行許可・承認申請の機体一覧から一度機体を削除して登録しなおしたらうまく行きました。
実際の飛行には飛ばす場所の飛行許可に加えてDIPSにて飛行計画の通報も必要です。
Happymodel EP1 ELRS受信機のファームウェアを更新に失敗しました。経過は別として、それを復活させることができましたので、よく知られたものですが回復手順を書いておきます。
ファームウェアの更新失敗後の現象は電源を入れるとLEDが点灯したままになり何も反応しなくなるというものでした。その他の前提としては、FCから外した状態での復活の挑戦です。
[ Bootloderモード ]
HappymodelのサイトによるとGNDパッドの近くにあるBootパッドをGNDに接続して電源を入れるとBootloaderモードに入れられます。これを使えば復活できそうです。
[ FTDI ]
(実際に使用したのは中国で購入したもので、このアマゾンリンクのものではありませんが、見た目はそっくりです)
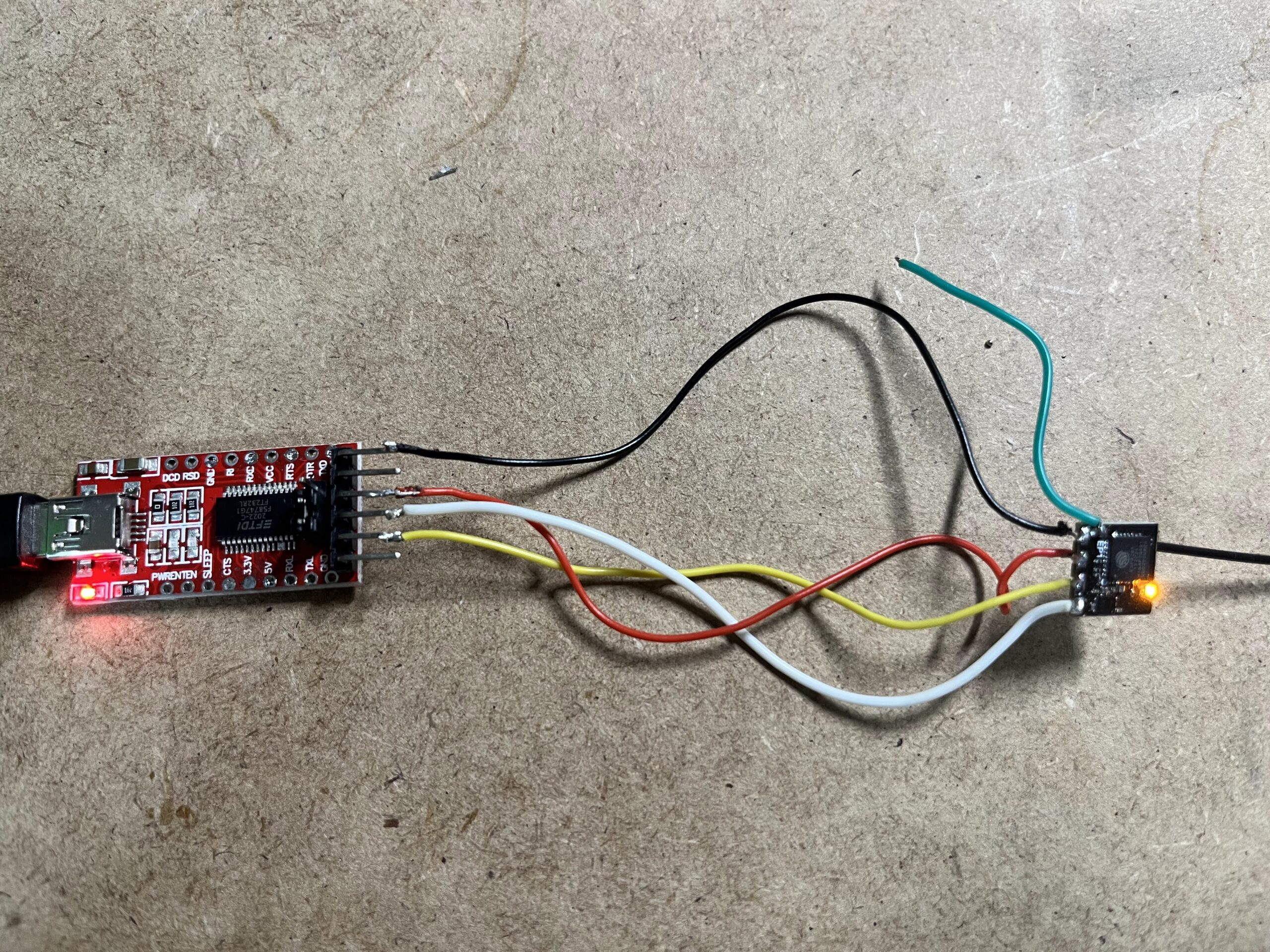
この小さな機械はPCのUSBに接続してシリアルポートとして使うものです。ちゃんとしたモデムを駆動できる各種信号線がありますが、実際に使用するのはVCC, GND, RX, TXです。
[ 接続 ]
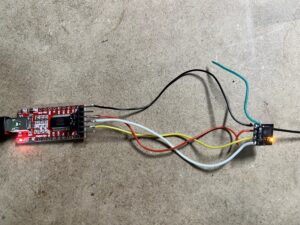
緑のワイヤーは一方の端を利用してBootとGNDをブリッジするために使用しています。黒はGNDです。赤はVCCです。VCCは3.3Vと5Vに変更できるようになっていますのでFTDI上のジャンパーで5Vにしておきます。白はFTDIのTXとEP1のRXを接続しています。黄はFTDIのRXとEP1のTXを接続しています。
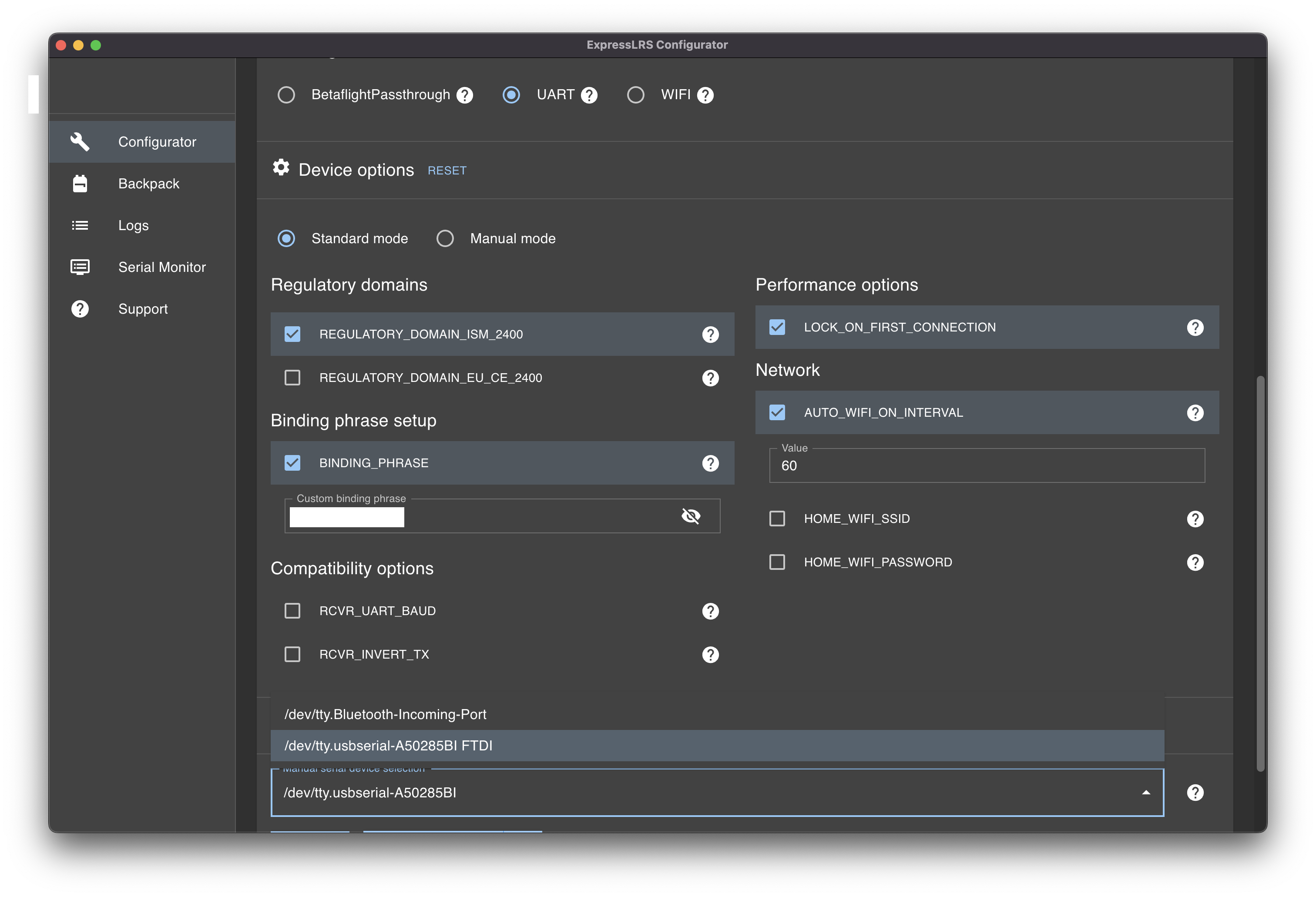
[ ELRS Configurator ]
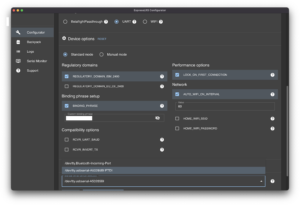
Flashing MethodをUART、Manual serial device selectionでFTDIに対応したusbserialを選ぶだけで、あとは普通通りにBUILD & FLASHを行います。
フラッシュ後はbootジャンパーを外します。
今回はFTDIを使用しましたが、FCに接続してBetaflight passthruでも復活できるような気はしますが試してはいません。

新しく65mm機を組み上げたのですが、電池の減りが異常に速い。1分でかなり電圧が低くなり2分間浮いて居られないです。リポ電池もそうとう熱くなるので電池寿命を縮めているのは間違いないと言えるほどです。
それをツイートしたら答えが得られました。
ということでESCのファームウェアをBluejayからJazzMaveric(BLHeli_M)にしたら問題解決。コンスタントに3分間飛べるようになりました。
最終的にはJESC 96KHzを使用しています。この機体にはEmuflightを載せていてRPMフィルターは使わないのでライセンスなしのJESC無料部分だけを使用しています。JazzMavericからJESCに変更したのは特に理由は無いです。JESCを最後にテストしたから、それを使い続けているだけのことです。
最初はBluejayの設定変更により問題が解決するのか探ってみるつもりでしたがJESCで快適に飛んでいるので、その気がなくなりました^^
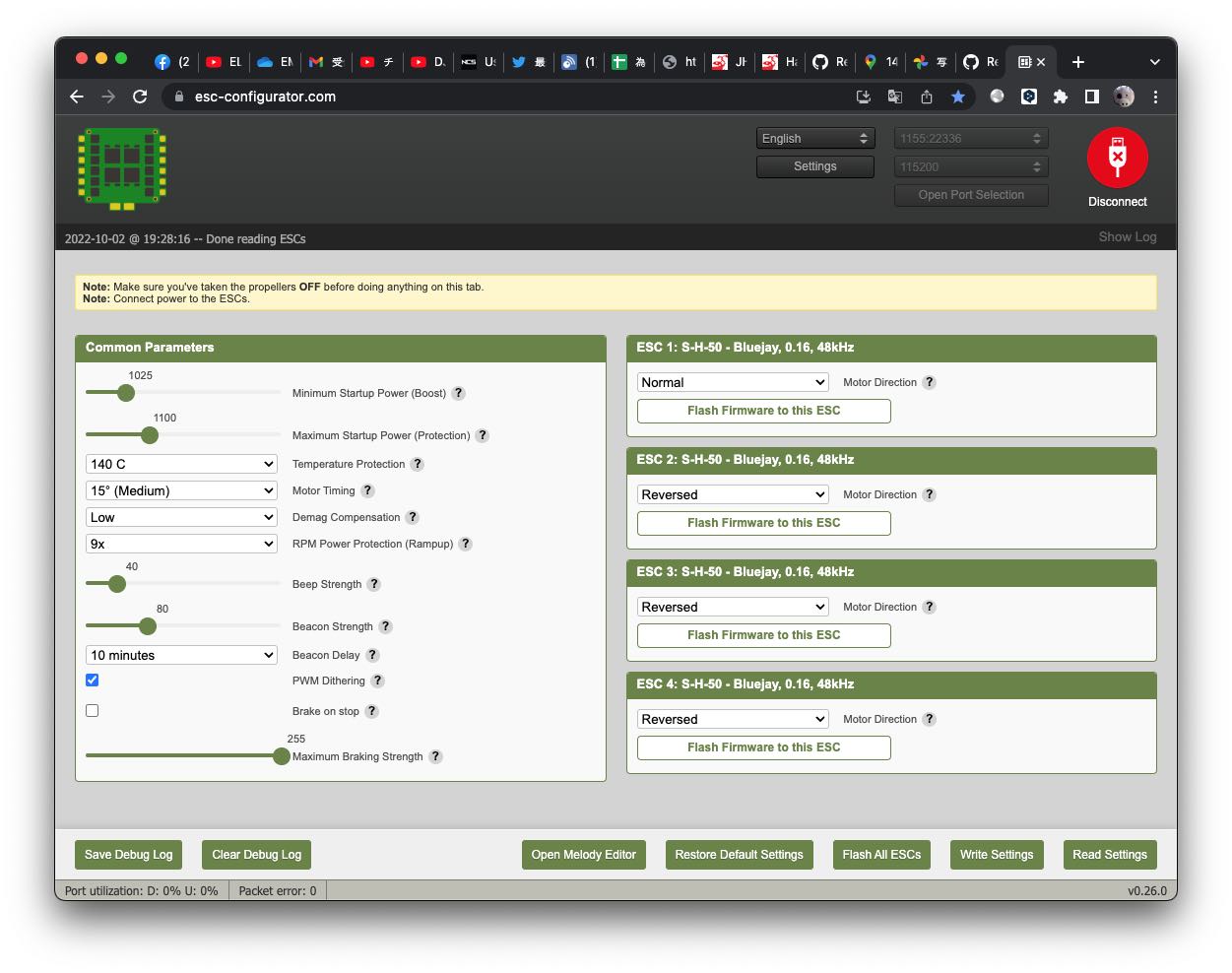
参考までにBluejayの時の設定画面を載せておきます。
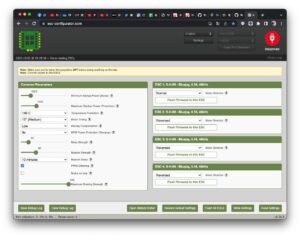
規定値から特に変更しているところは無いと思います。
上海時代に使用していた3DプリンターはXYZPrintingの物で完全にカバーされた大きな筐体のものでした。さすがに大きいので日本に運ぶという選択肢はありませんでした。もとよりだいぶ時間が経過してより高性能で小型でかつ安価なものが日本でも購入できるので買い替えとなりました。
購入したのはすでに日本のFPVドローン界隈でも定評のあるKINGROON KP3Sです。
時代が違うとは言え、上海で使用していた3Dプリンターの値段の1/4くらいでダイレクトフィード、ヒートベッドの3Dプリンターが購入出来るのは驚きです。
日本語での情報が既に多数ありますのでごく簡単に紹介いたします。
[ 組み立て ]
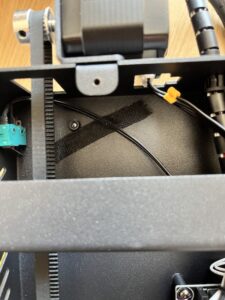
X軸を本体に建てるだけなので難しいことはありませんが、付属のマニュアルに足りない部分があります。

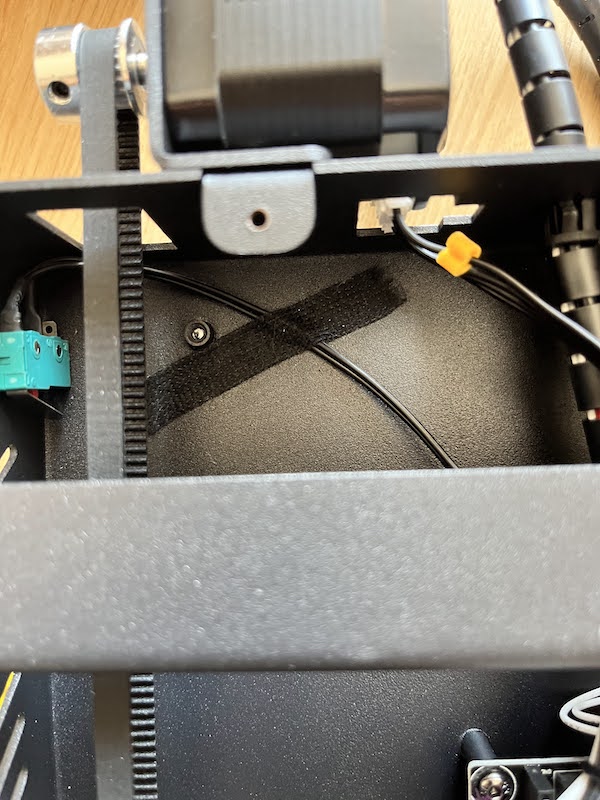
写真のZaxis Screwを取り付けるステップが足りません。取り付けるべき場所はすぐわかりますが、取り付け方のコツなどは「まず分解。」に詳しく書かれていますのでご覧ください。またこの記事に書かれていることに従って本体内部のケーブルがY軸ベルトに当たらないように布テープで留めておきました。
[ フィラメントガイド ]
フィラメントを置くためのベアリングの付いた台があるので、それを適当に横に置いてそこから適当なルートでエクストルーダーに供給して出力します。それでも問題は無いようですが、フィラメントの供給ルートが定まっていないと気持ちが良く無いです。簡単なガイドをX軸の一番上に取り付けてみました。

[ スライサー ]
スライサーは定評のあるUltimaker Curaにしました。KP3S用の設定が付属しているので全く手間要らずでした。STLファイルをスライスした結果のGコードをマイクロSDカードに保管して、それをKP3Sに読み込ませるという運用です。CuraがマイクロSDカードの挿入を認識すると自動的に保管先が変更され、また保管後にマイクロSDカードの取り出しボタンも自動的に表示されるのでかなり手間が省けるあたりは素晴らしいです。
[ フィラメント ]
日本でフィラメントを購入するのは初めてなのでアマゾンで適当に選んでみました。ANYCUBICのPLAとPxmalion Flexible TPUで、いずれも黒です。設定は結論を言うと、それぞれCuraのGeneric PLAとGeneric TPU 95Aをそのまま使用して出力出来ました。TPUは少し考えすぎて設定を色々といじって試しましたが、結局のところ何も変更しなくて良かったです。少しだけ糸引きがあるので、設定をいじる余地はあると思います。またPLAは問題ありませんがTPUは接着剤を併用しないとベッドに定着しませんでした。ダイソーの養生テープ+シワなしピットという定番の組み合わせでTPU出力を行なっています。もしかすると養生テープなしで、そのままシワなしピットを塗っても大丈夫なのかもしれません。
< 補足 >
TPUが定着しなかったのはビルドプレートの温度が0度になっていたからでした。これを60度にしたらちゃんと定着しました。あと、定着良くするためにPLA, TPUともにプリムを設定するようにしました。
[ 音 ]
噂通り動作音よりファンの音が気になります。そのうち電源だけでも静音ファンに交換したいと思います。

DawinFPVの2.5インチ軽量フリースタイルドローンであるTinyApeのRuncam Thumb付きを購入しました。
– FC上にELRS受信機が搭載されているBNF機です。よくあるELRS付きAIO FCはセラミックアンテナが付いていますがDarwinのものは外付けアンテナです。このサイズのドローンだとどちらでも良いとは思いますが、外付けアンテナは安心感があります。15AのESCにはBluejayが導入されているらしいです。
– モーターはDarwin 1103 8000KVで3Sでも飛ばせます。
– プロペラはGemfan 2512 3bladesです。
– VTXは600mWの外付けです。フレームの上蓋にしっかりとねじ止めされています。
– カメラはRuncam Nano 4です。悪くない選択と思います。
重量は手持ちの3S 550mAhを載せても100g未満に収まります。
箱だしの状態でPIDs/フィルターは何かしらの設定がなされています。ペラの回転方向はProp-inです。またRPMフィルターは使用していませんでした。まずはスイッチ類とRatesだけを設定して飛ばしてみました。2Sと3Sの両方で飛ばしてみましたが重量の問題なのか2Sの方がフィーリングが良かったです。
いずれRPMフィルターを設定し、Prop-outも試してみたいと思います。
75mm 1Sドローンの屋外テストの際にND0(プロテクショングラス)で晴れの日に撮影したらどうなるかを試してみました。

Insta360 GO/GO2だとNDフィルター無しでもちゃんと撮影できますが、Thumbではシャッタースピードが速くなるだけでは調整が効かず露出過多になりました。thumb.confのexposerは規定値の6のままにしいます。これを変更すれば結果は違ったと思います。が、晴れの日にはND16を装着するのが良いと思います。
 AliExpress.com Product – NEW RunCam Thumb Mini Camera HD Action FPV 1080P 60FPS 9.8g 150° FOV Gyroflow Stabilization For RC Drones DIY Parts
AliExpress.com Product – NEW RunCam Thumb Mini Camera HD Action FPV 1080P 60FPS 9.8g 150° FOV Gyroflow Stabilization For RC Drones DIY Parts
以前、「GOCam PM GRがバーションアップでやっと使えるようになりました」という記事を書きました。その時は動画ファイルがエラーの無いものになったという趣旨でした。新しいファームウェアV2.0.0ではジャイロデータが改善されGyroflowで簡単にスタビライズ出来るようになりました。今度こそGOCam PMH GRは完成したと言って良いでしょう。
 AliExpress.com Product – iFlight GOCam PM GR Action Camera Supports up to 4K/30FPS for FPV parts designed for CineWhoops and big FPV quads
AliExpress.com Product – iFlight GOCam PM GR Action Camera Supports up to 4K/30FPS for FPV parts designed for CineWhoops and big FPV quads
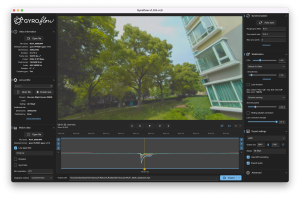
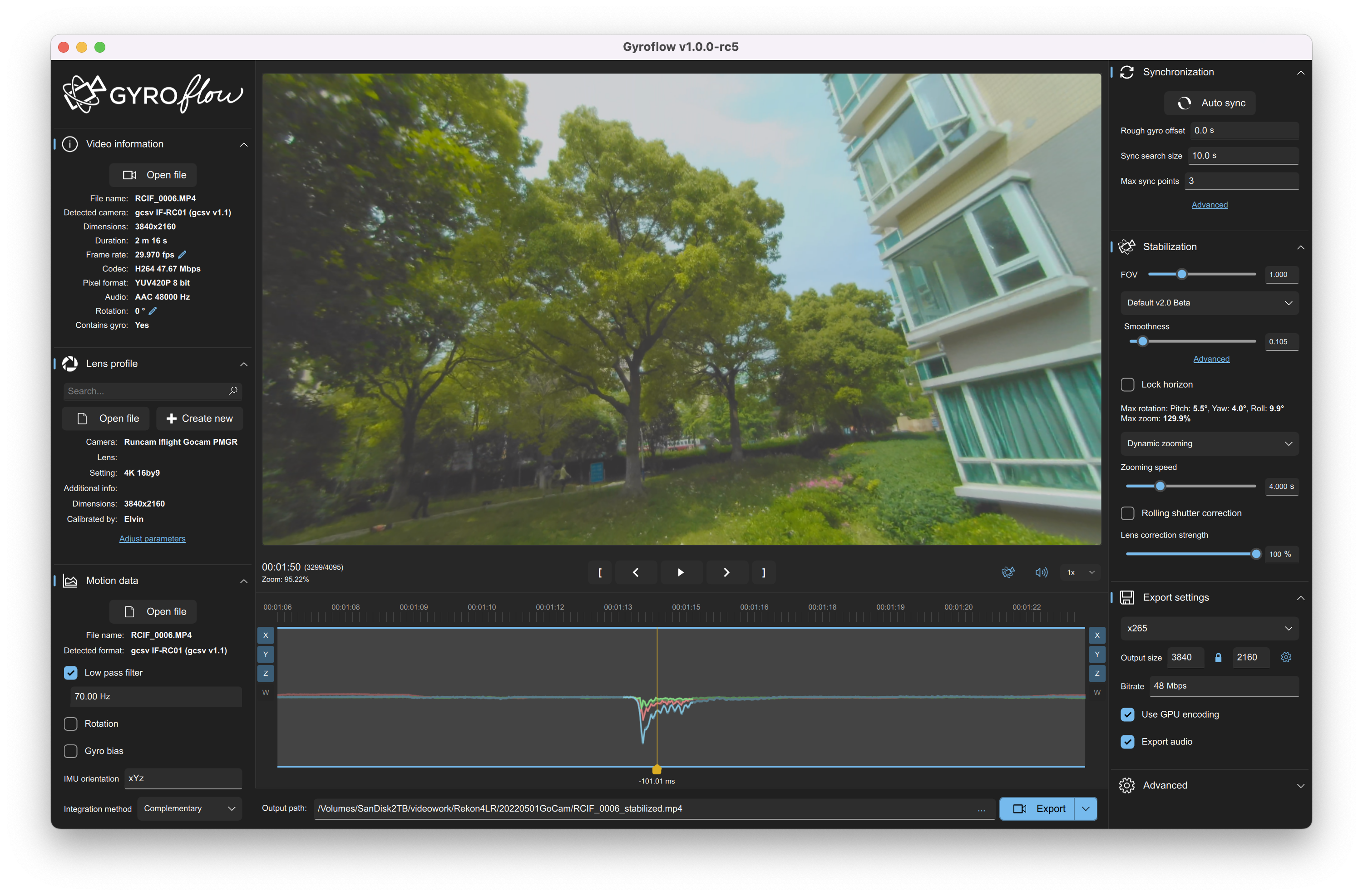
上のキャプチャーはわたしのはGyroflow設定例です。
– Lens profile: GOCam PMGR 4Kを使用(撮影設定に合わせます)。
– Motion Data: ジャイロデータのファイルは撮影した動画に合わせて自動的に選択されました。Low Pass Filterに70Hzをセットしました。
– 書き出し範囲の指定が必要であれば行います。
– Auto syncを実行。syncポイントの微調整は行いませんでしたが、動きが適度に大きいところにいくつかAuto sync hereを実行しました。(ジャイロデータのグラフ上で右クリックするとメニューが出ます)
– Smoothness: フリースタイルでは小さめにすると良いと思います。わたしは0.05から0.1くらいです。
– あとはExportするだけです。
GOCam PM GRの最初の頃はとても派手な色合いでした。前回のファームウェアくらいからフラットカラーっぽい色合いに変わり、私自身未だうまくカラー調整出来ていません。DJI_Phantom4_DLOG2Rec709というLUTを適用してから色々いじってはいますが、なんかレトロっぽい感じになってしまいました。
一応、満足の行く格安カメラにはなりました。GoProもあるし小型軽量格安ということでうればRuncam Thumbもありますし、あまり出番はないと思います。
Mobula7 1Sが調子が良いと聞いて75mm 1Sを組んでみることにしました。85mmを作り始めてからは完全に75mmは要らないサイズになっていましたのでBeta75X以来の75mm機です。

[ 集めた部品 ]
– NewBeeDrone Cockroach 75 カーボンの補強が有って安心感があります。
– HappyModel Mobula6 HD Larva X Canopy Black カッコ良いし丈夫そうなので選びました。
– HappyModel ExpressLRS ELRS F4 AIO 5in1 FC ELRS搭載の全部入りFCです。
– T-Motor 0802 25000KV やや高めなのですが、T-Motorを使ってみたいだけの気持ちで選びました。
– Caddx FPV Baby Ratel 2 これもやや高めですが、夜でも綺麗に見えるそうです。
– Gemfan 40MM 1610 2-Blade Whoopで初めて2枚ぺらを使ってみます。mobula7 1Sの真似です。
– BETAFPV BT2.0 1S Whoop Cable Pigtail 1S機はBT2.0に統一しつつあります。
– TATTU 300mAh 3.8V 1S 75C HV 4.35V TATTUの1Sは初めて使いますが、TATTUなのできっと大丈夫。
[ 組み立て 】
語るほどの事はありませんが、少しだけ普通と違うことやFCについて書いておきます。
このフレームは上側下側の両方にスタッドが立っています。FCは下側にマウントしてみました。ELRSのセラミックスアンテナが少しフレームメンバーに当たるので、その部分はカットしました。
FCに入っていたファームウェアレベルは良くは分かりませんが日付から想像すると4.3-RC3くらいです。Moubla6 ELRSとして構成済みでした。
– 普通にマウントしたら、前後反対に構成されていました。構成に合わせて使おうとも思いましたがBetaflight 4.3の簡単なモーターリアサインを試すチャンスなので正常な方向に構成し直しました。Gyroの向きを180度変更しモーターのページでReorder motorsボタンでモーターの位置を変更します。説明の必要がないくらいに簡単です。CLIのresourceコマンドを使うことはほぼ無くなりそうですね。
– モーターの回転方向もMotor directionで行いました。そのためESCのファームウェアバージョンなどはまだ確認していません。Bidirectional DSHOTは構成済みでした。
– RPMフィルターも構成済みでPIDなども何かしら設定されているので、そのまま飛ばすことにしました。
キャノピーが思ったより小さくてBaby Ratel 2が普通には入りません。仕方なく上下逆さまにカメラを入れました。
屋外飛行に備えてブザーも付けました。
キャノピーの上面が平らになっているので、そこに装着するRunCam Thumbマウントを作りました。かなりアバウトな作りですが、問題ないようです。簡単な造形ですがThingiverseに置いておきます。
[ 飛行 ]
室内では私にはオーバーパワーで慎重に飛ばさないといけないです。慣れるまではMotor Outputを下げて飛ばしました。早く外でも飛ばしてみたいのですが、現在の上海の状況ではままなりません。

AliExpress.com Product – NEW RunCam Thumb Mini Camera HD Action FPV 1080P 60FPS 9.8g 150° FOV Gyroflow Stabilization For RC Drones DIY Parts
RunCam ThumbのファームウェアがV2.1.0になり、やっとGyroflowでちゃんと安定した動画を得られるようになりました。
そこで実験です。RunCam Thumbのジャイロデータを利用して別のカメラで撮影した動画を安定化を試してみました。RunCam Thumbは格安で小型軽量なので、他の高解像度なカメラと一緒にマウントしてジャイロデータロガーとして使用する可能性を秘めています。
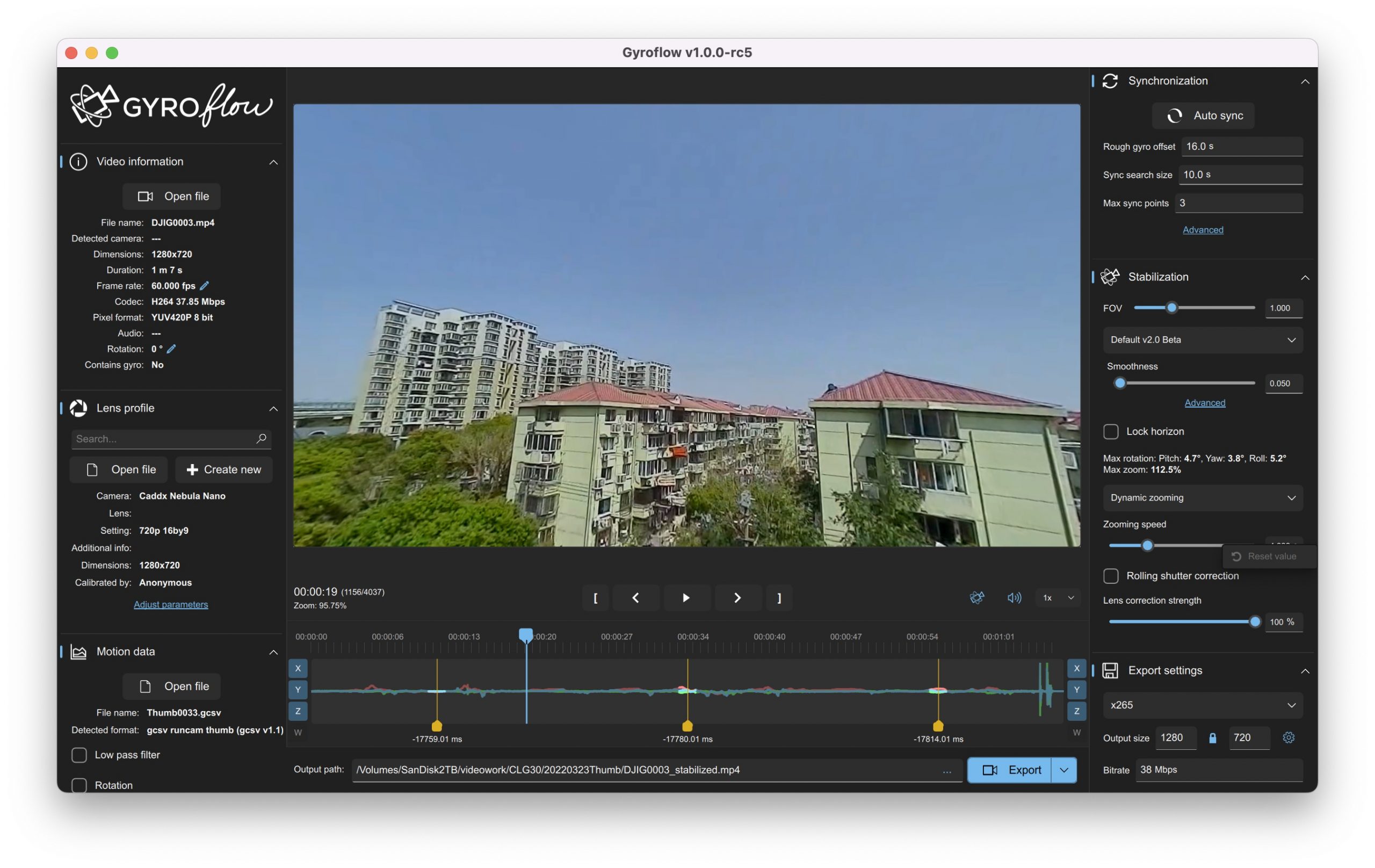
取り急ぎの実験なのでFPVカメラ(Caddx Vista Nebula Nano)のDVRで録画したものを安定化してみました。Gyroflowに慣れていればやり方は自ずとわかると思います。参考として、わたしの設定画面を下に貼っておきます。

各項目を左上から順にざっと説明します。
– Video / File name: DJIG0003.mp4, DJI Goggleで録画した動画です。
– Lens Profile : Caddx Nebula Nano, もしプロファイルがない場合は自分でも簡単(ほぼ自動です)に作成出来ます。
– Motion Data / File name: Thumb0033.gcsv, RunCam Thumbで生成したジャイロデータです。
– Synchronization / Rough gyro offset : 16.0s, 動画とジャイロデータのズレをだいたいで指定します。オフセットの正負は気にしなくても大丈夫なようです。その後でAuto syncを実行します。
– Stabilization / Smoothness : 0.050, 既定値の0.50から大幅に小さくしています。ロールしたりフリップした時に既定値のままだと画面が大きく動いてしまいダイナミックズームの結果見苦しくなります。わたしのようなまったりとしたフリースタイルでも直を小さくした方が自然です。
やっとRunCam Thumbが使えるようになりました。ファームウェアV2.1.0にてちゃんと使えるジャイロデータが生成することが出来ます。
AliExpress.com Product – NEW RunCam Thumb Mini Camera HD Action FPV 1080P 60FPS 9.8g 150° FOV Gyroflow Stabilization For RC Drones DIY Parts
V2.1.0で変わったこと
– thumb.confで構成するようになった。私が変更したのはGCsv=1だけです。これによりジャイロデータが取得できます。
– ジャイロデータがGyroflow形式に変わり、拡張子がgcsvになった。Gyroflowは自動的にジャイロデータを見つけて読み込んでくれるのであまり気にしなくても良いです。
– 60FPSでもジャイロデータが取れるようになった。
– PCにUSBで接続した状態で本体のボタンを押すと1080Pのwebカムとして動作する。ただし、少々広角すぎる。
室内でテストしただけでジャイロデータが改善されているのがわかります。以前はノイズが多くローパスフィルターを入れてやっとそれらしいデータになっていましたが、新しいファームウェアでは綺麗な波形が表示されます。またV2.0.0では明らかにジャイロのオリエンテーションが間違っていたのも直っています。
ということで、天候の回復を待ってやっとテスト飛行が出来ました。上海の我が家はオミクロン対策で閉鎖して全員PCR検査の実施中なのでマンション内でのテスト飛行です。
Gyroflow v1.0.0-rc5
– 自動同期で完璧に同期できました。
– 「滑らかさ」は0.050とかなり小さくしました。既定値のままだとロールなどの動きがうまく処理出来ないです。