GoPro Liteでは最初の頃にはFCに接続してリモートコントロールを試してはいましたが、ドローンを変更したりしているうちに給電すらFCに接続せずにリポのバランスケーブルから取るようになってしまいました。Caddx Peanutも同様にFC接続しない方向で考えていたのですが、一度は試してみなければということでFCからの給電とリモートコントロールの設定を行いました。
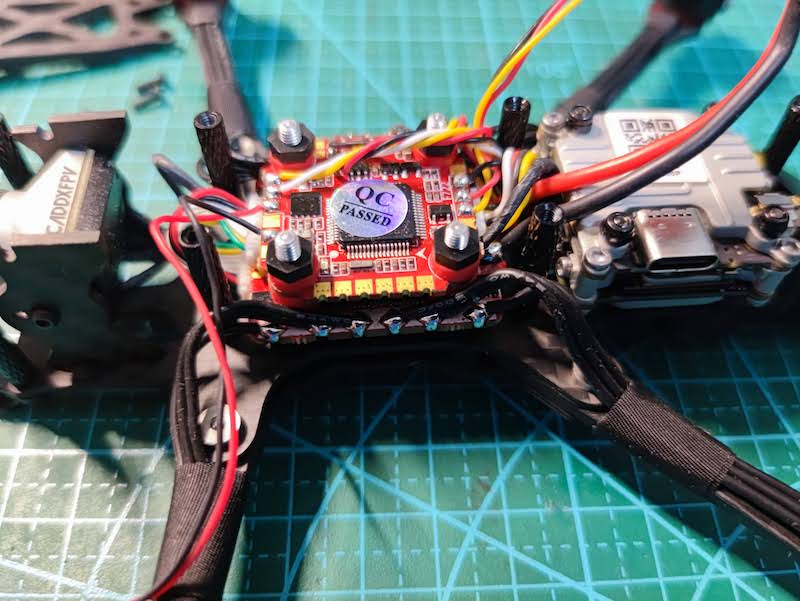
マニュアルに詳しい設定方法が書かれています。マニュアルではTXのひとつを使用するようになっていますが、わたしはLED_STRIPで行いました。私の場合、概ね以下の手順です。
resource LED_STRIP NONE
resource PINIO 1 A15
wt pinio_box = 40,255,255,255
save
A15はもともとLED_STRIPに割り当てられていたリソースです。
これでTango2の押しボタンがPeabut本体のスイッチと同じように働きます。
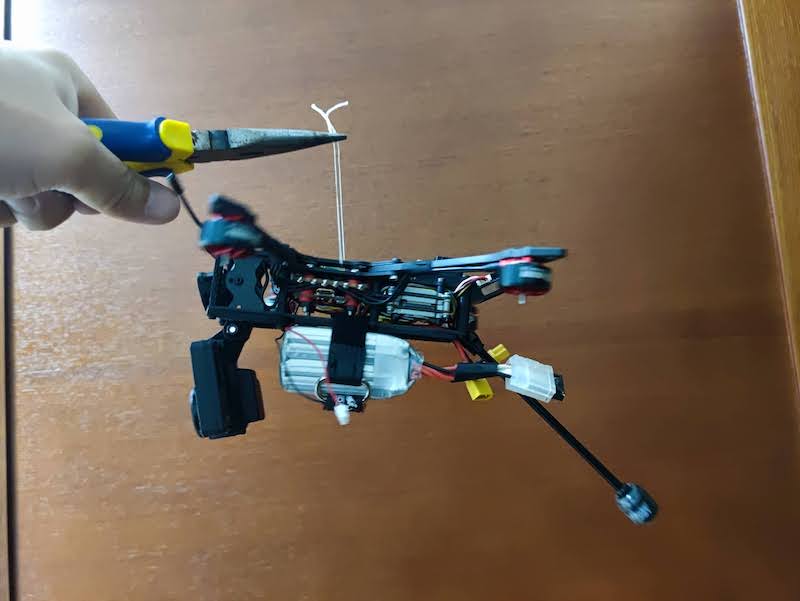
GoProと設定方法は同じですが、大きく異なるのはもともとPeanut本体にはボタンがひとつしかないことです。このため本体のボタンとまったく同じことが一本の配線によりプロボから行えるようになります。すなわち長押しによる電源オン、オフ。ボタンを押す回数によるカメラ機能の選択です。これは使ってみて初めて便利さに気づきました。
最初は電源オフ、オンも出来て便利くらいに思っていましたが、ボタンの2回押しも出来るので例えば飛行中に写真の撮影を行うことも出来ます。わたしのボタン設定では1回押しでPro Videoのスタート、ストップ。2回押しでは写真の撮影にしています。試しに飛行中に写真撮影をしたものを以下に貼り付けておきます。写真はRAW撮影で、それをInsta360 Studioで現像したものです。常用するかどうかは別にしてこういうことが出来るのは面白いし、いずれ役に立ちそうに思います。
Caddx PeanutはInsta360 GO2と中身は同じですので携帯電話アプリはInsta360のものを使用します。ほとんどの設定や操作はInsta360 GO2と同じようにアプリから行うことが出来ます。ただしファームウェアの更新だけは出来ません。出荷時のバージョンはv3.10.7で設定画面を見ると新しいファームウェアが存在することが分かります。しかし更新画面に入ると例のケースに入れるように言われてしまい、そこから先には進めません。
YouTubeで更新手順を見つけたので試して見ました。特に難しくはなくファームウェアファイルをダウンロードし内蔵ストレージにコピーしてから電源をオンにするだけです。動画を見ていただくとLEDの状態の遷移もわかるので実際に更新する前に見ておくのがおすすめです。VIDEO
最新ファームウェアはv3.10.8とマイナーバージョンがひとつ変わっただけですので大差はないかもしれません。
Caddx PeanutにはInsta360 GO2のようなケースは付いていません。代わりに背面に取り付けるUSBアダプターが付属しています。
USB Type-Cコネクターですので、なんの迷いもなく両端がType-Cのケーブルを使用してUSB PDな充電器に接続しみましたが充電が開始されません。本気で不良品として販売店に連絡をしようと思いましたが、試しに5V 2Aしか出していない充電器に接続したところ無事に赤いLEDが点灯しました。実は同じような振る舞いのBluetoothイヤフォンを持っているので気が付きました。
調べてみるとInsta360 GO2も同じらしいです。調べた限りではQC3.0の充電器は問題がないようです。またMacbook Proに接続する時も同じで両端がType-Cのケーブルで接続すると認識されません。
USBは充電のためだけではなく(というかドローン給電しているとわざわざ充電の必要が無いです)、PCに対して内蔵ストレージをUSBドライブとして認識させることが出来ます。手順は簡単でUSB接続すると赤いLEDが点灯し充電が開始されます。そこで本体のボタンを2秒ほど押して電源をオンにするとLEDが青い点滅に変わりUSBドライブになります。初代Insta360 GOでは現場で携帯電話に動画を移していかないとすぐに内蔵ストレージがいっぱいになってしまいましたが、今度は32GBもあるので家に帰ってからPCに動画を移動するというのが良い気がします。
待望のInsta360 GO2のFPV特化版であるCaddx Peanutがようやく発売されました。すぐに発注し9月末には入手できました。想像以上にFPV向けになっています。
以下、ND16フィルターを装着して、晴天の日に初飛行した様子です。かなり黄色い感じがすると思います。
改めてNDフィルターの比較テストを実行した結果です。VIDEO
NDフィルターの問題はレビュアーの人たちの言及が無いのが不思議です。Facebookにて問題提起はしていますが改めてCaddxにもメールで問い合わせて見ようかと思っています。
珍しく購入したRekon4 LR PNP、最初はなるべく箱出しの状態で飛ばしていましたが、少しだけ改造を始めました。
[ Barometer追加 ]
[ Caddx Vistaのアンテナを交換 ]
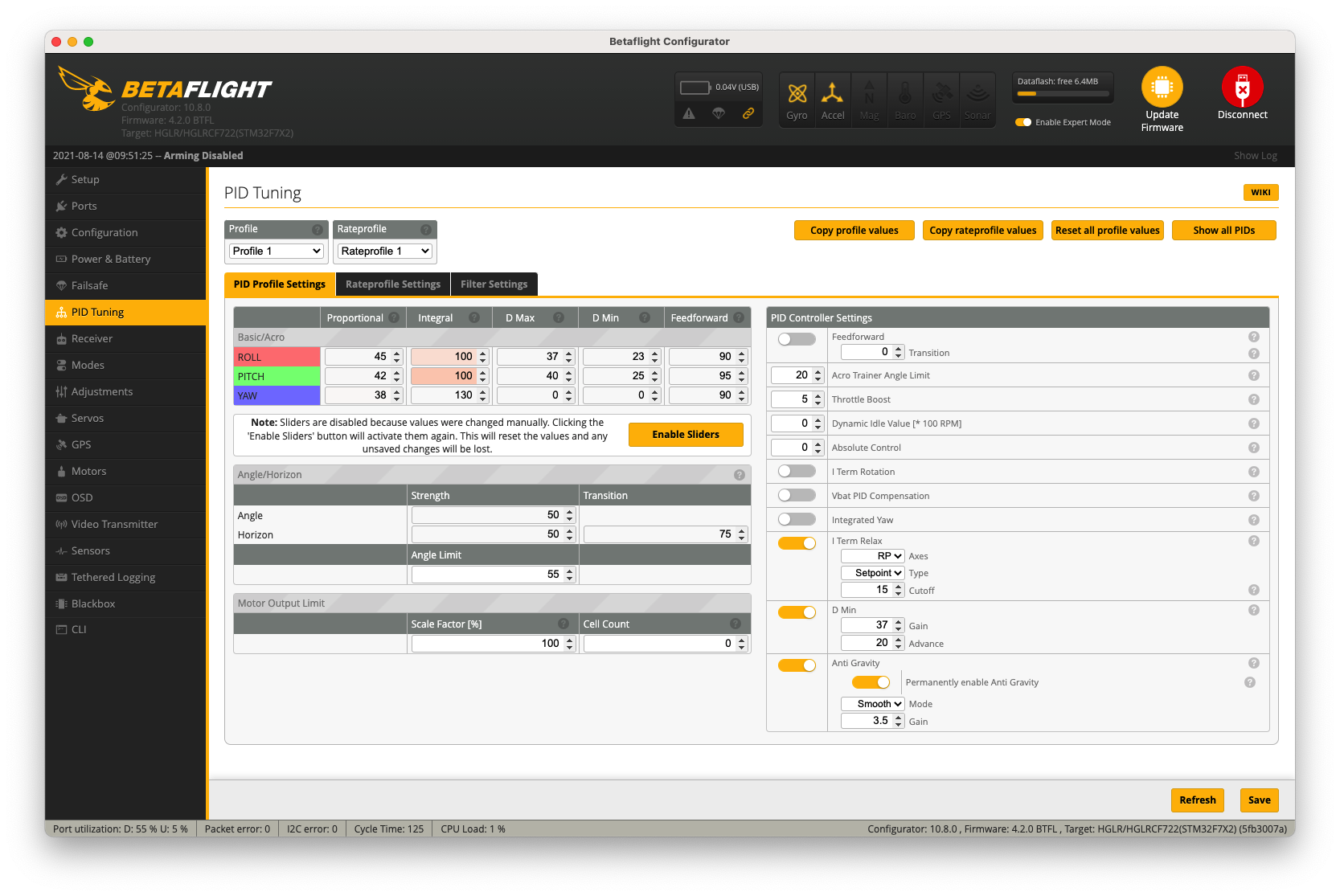
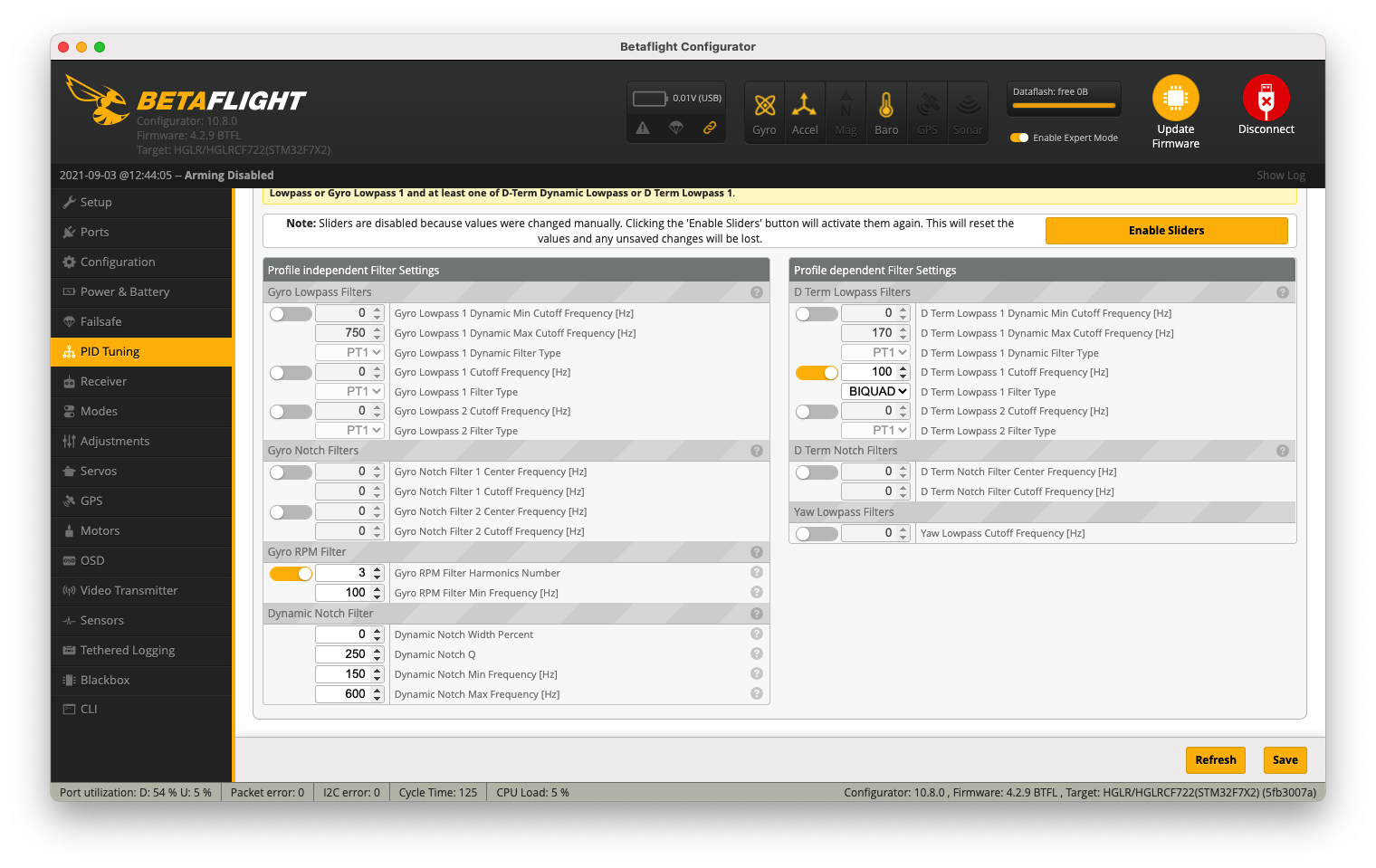
[ RPMフィルターを設定 ]
[ PIDをえいやで設定 ]
iFlight GOCam PM GRはRuncam 5 Orangeをリパッケージしたもので、発表当初はあまり興味を持ちませんでした。その後、gyroflowがうまく動くようになったとのことで入手することにしました。Runcam 5 Orangeの方が安いのですが、バッテリーレスで軽量なこと、BEC付きケーブル、NDフィルターがセットになっていることからGOCam PM GRに決めました。
電源コネクターはGoPro Liteと違い4ピンです。これは電源に加え、UARTのTX/RXに接続するためです。これによりRuncam仕様のカメラコントロールができるようになっています。
NDフィルターは45度ほど回転させてツメをかけるタイプでしっかりとしていて安心感があります。
gyroflowを使用するためにはファームウェアの更新が必要でした。更新はSDカードを使う方式で難しいことは何もありませんでした。
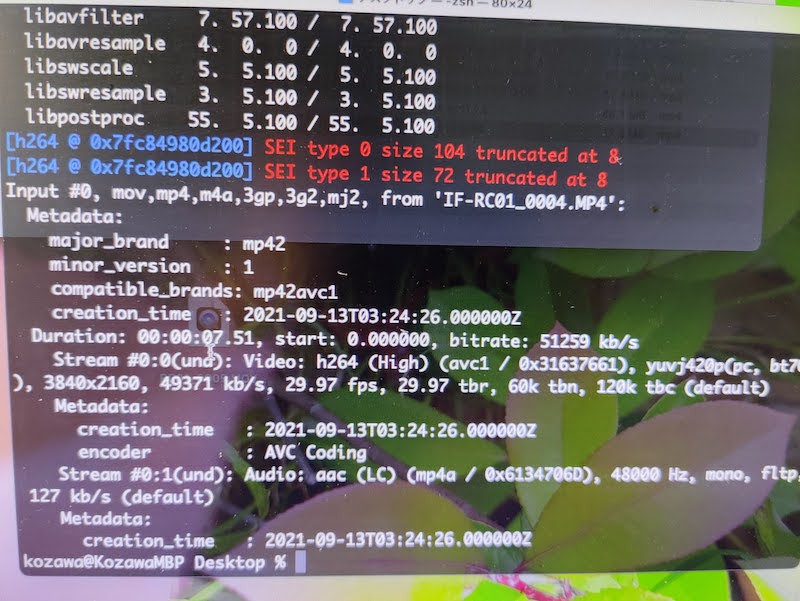
[ トラブル ]
販売店に相談すると録画手順やSDカードの確認後、いちど送り返すことになりました。ところが販売店では動画の再生が問題なく出来るとのことです。それで再度送ってもらいテストしてみるとWindowsのVLCでは再生可能。ffmpeg付属のffplayではMacでも再生可能ということがわかりました。ただしffplayは例の赤いエラーを出しながら再生します。ffplayが動くということでGyroflowも動作は可能です。もともとgyroflowで安定化してから編集するつもりでしたので実用上の問題はないと思います。
ただ普通にプレビューできないと不便ですし、これが正規の状態ということはないと思います。何かしらハズレの個体であると思います。ただAlbert KimさんのGyroflowデモ を見ているとffmpegが同じエラーを出していますし私だけではないのかもです。
取り急ぎ飛ばしてみた動画です。
Gyroflowは概ね良好に働いています。ところどころ細かいところで変な動きが見られます。Gocamの問題かGyroflowの問題かはわかりませんが、Albert Kimさんも指摘していることでもありますし、そのうち改善されると期待したいです。
あとから調べてみると1440Pはデータレート低めなようてす。次は2.7K 60FPSと4K 30FPSを試してみます。
FPVドローンにGPSを付けているならば、それで得られるデータをより活用したいと思うのも自然なことです。GPSで得られたデータはテレメトリーとしてプロポ側に返ってきます。それをSDカードに保管することが出来ます。詳しくはお馴染みのOscar Liangが書いたHow to Log GPS Coordinates in OpenTX Radios を御覧ください。
これで得られたログはcsvファイルとしてプロポのSDカードに保管されています。それをOpenTX Companionに読み込みGoogle Earthにリンクすることで活用するのが一般的に公開されている手法でした。
これだけでは今ひとつ活用範囲が狭いです。そこでOpenTXで取得したログをGPSログとして一般的なGPXファイルに変換するプログラムを作りました。https://github.com/nkozawa/OpenTX2GPX
GPXファイルはGoogle Earthに読み込めるだけではなくGarmin VIRB Editなどを使うことにより映像とテレメトリーを組み合わせることも出来ます。VIDEO
さらに最新版ではいろいろと変わりました。v0.62での例はhttps://www.nkozawa.com/blog/archives/7178 をご覧ください。
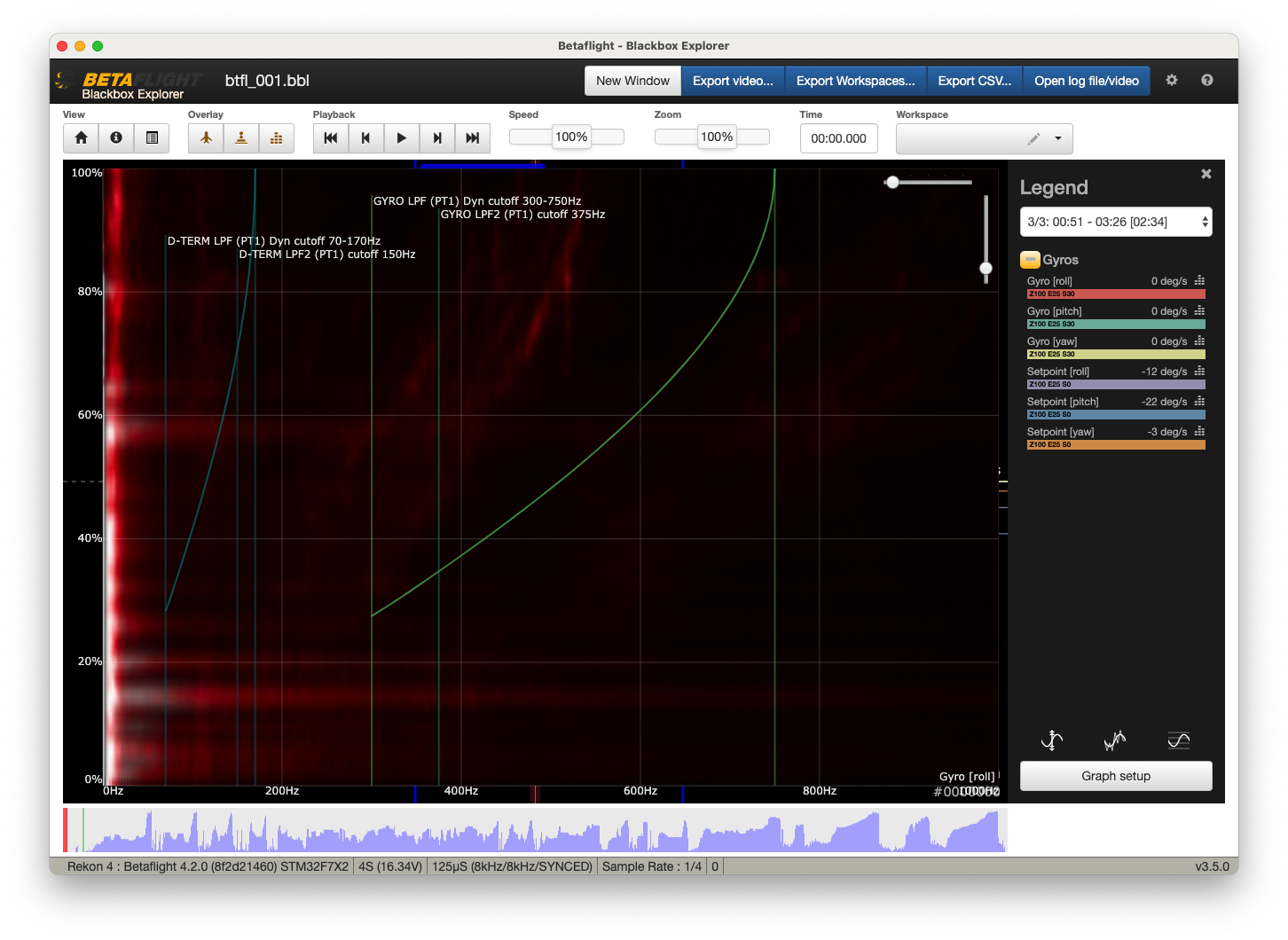
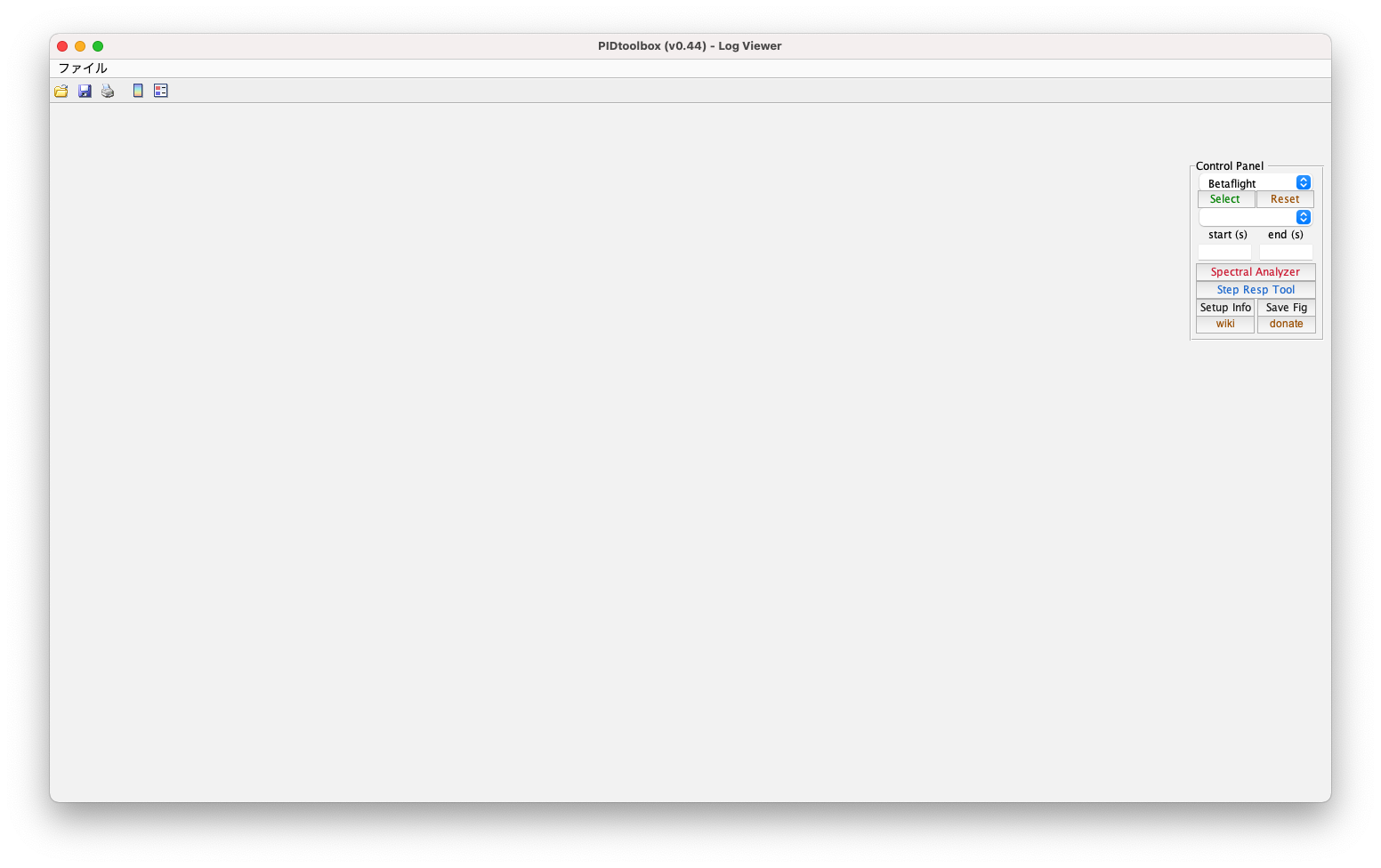
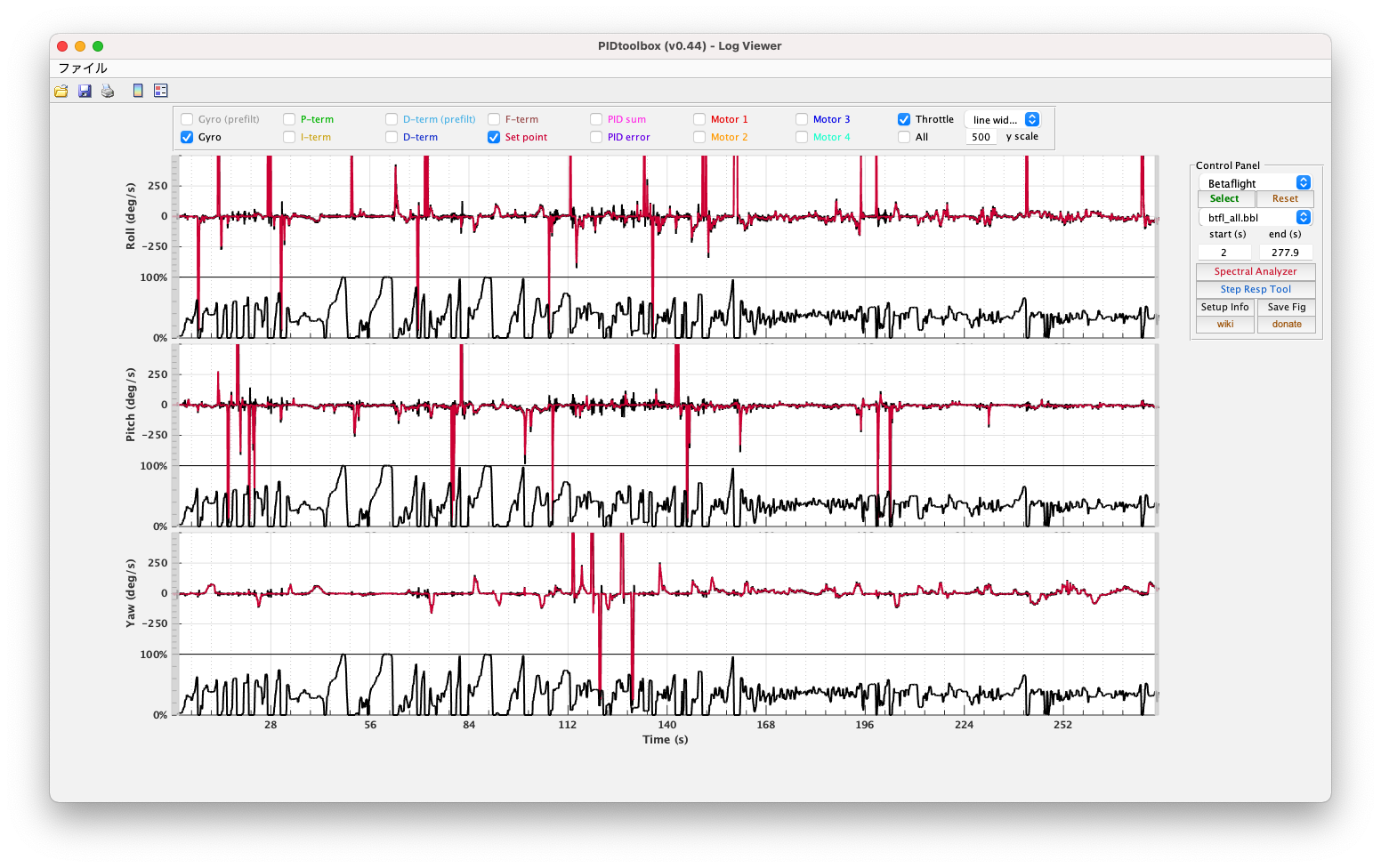
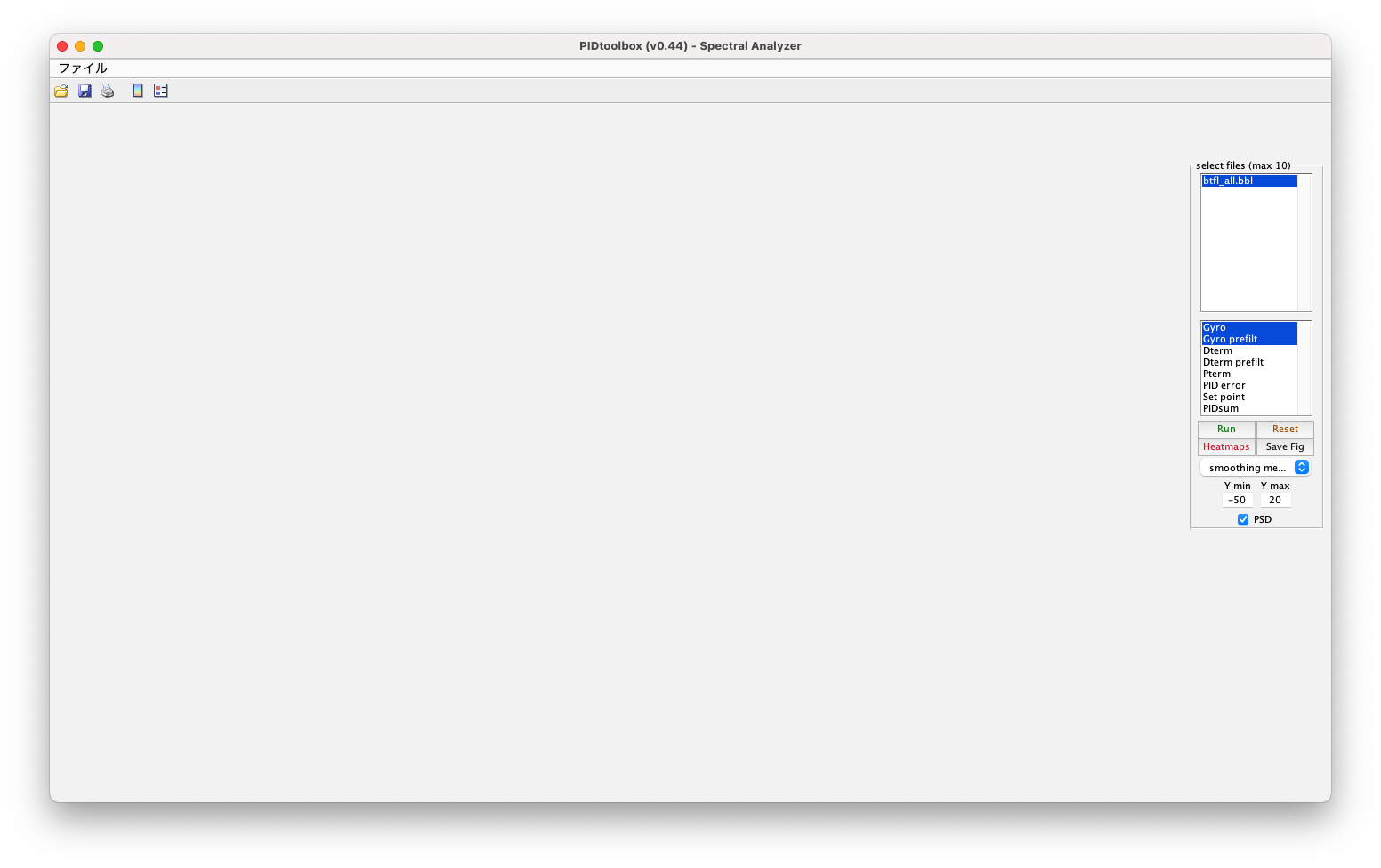
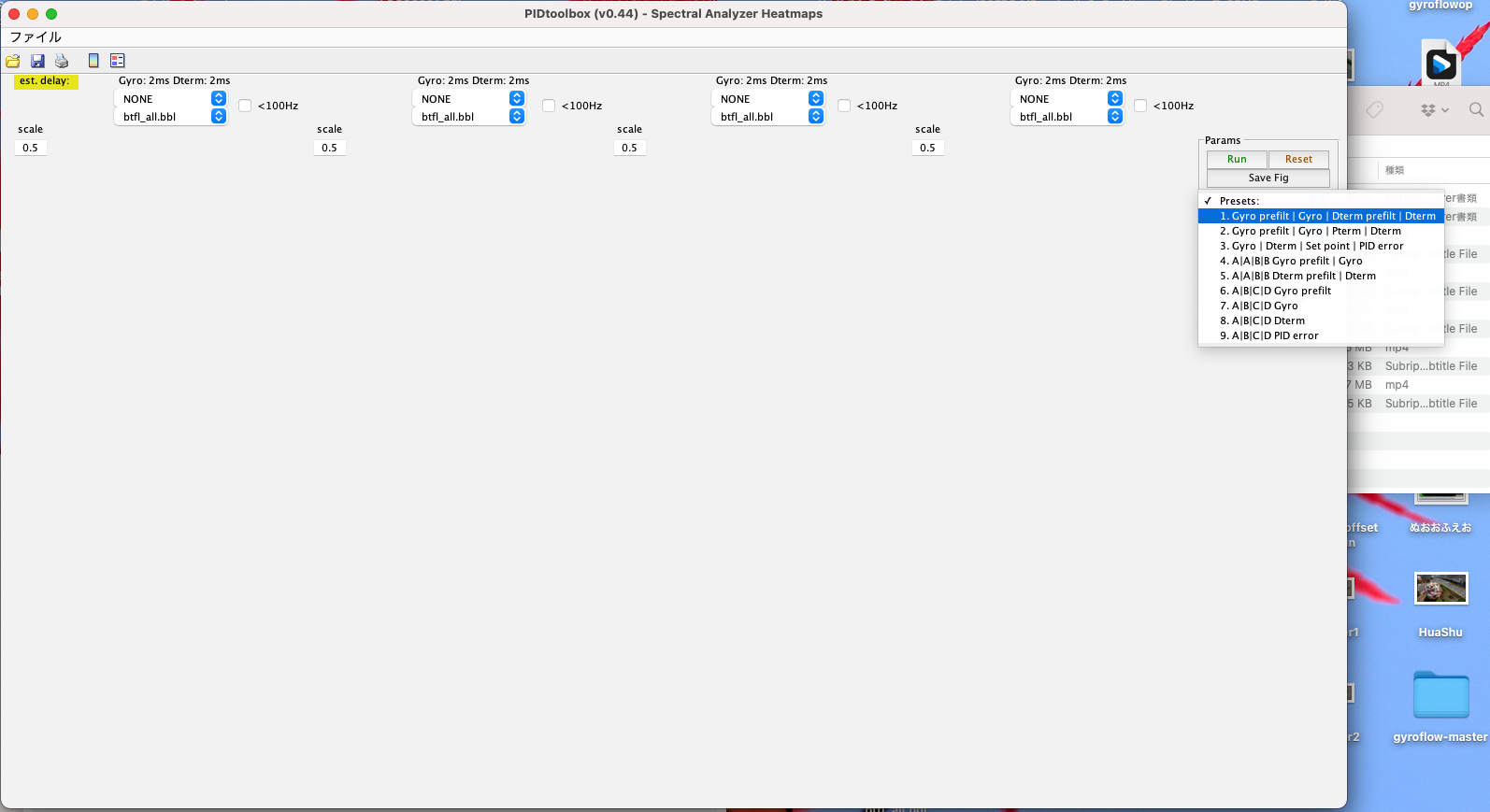
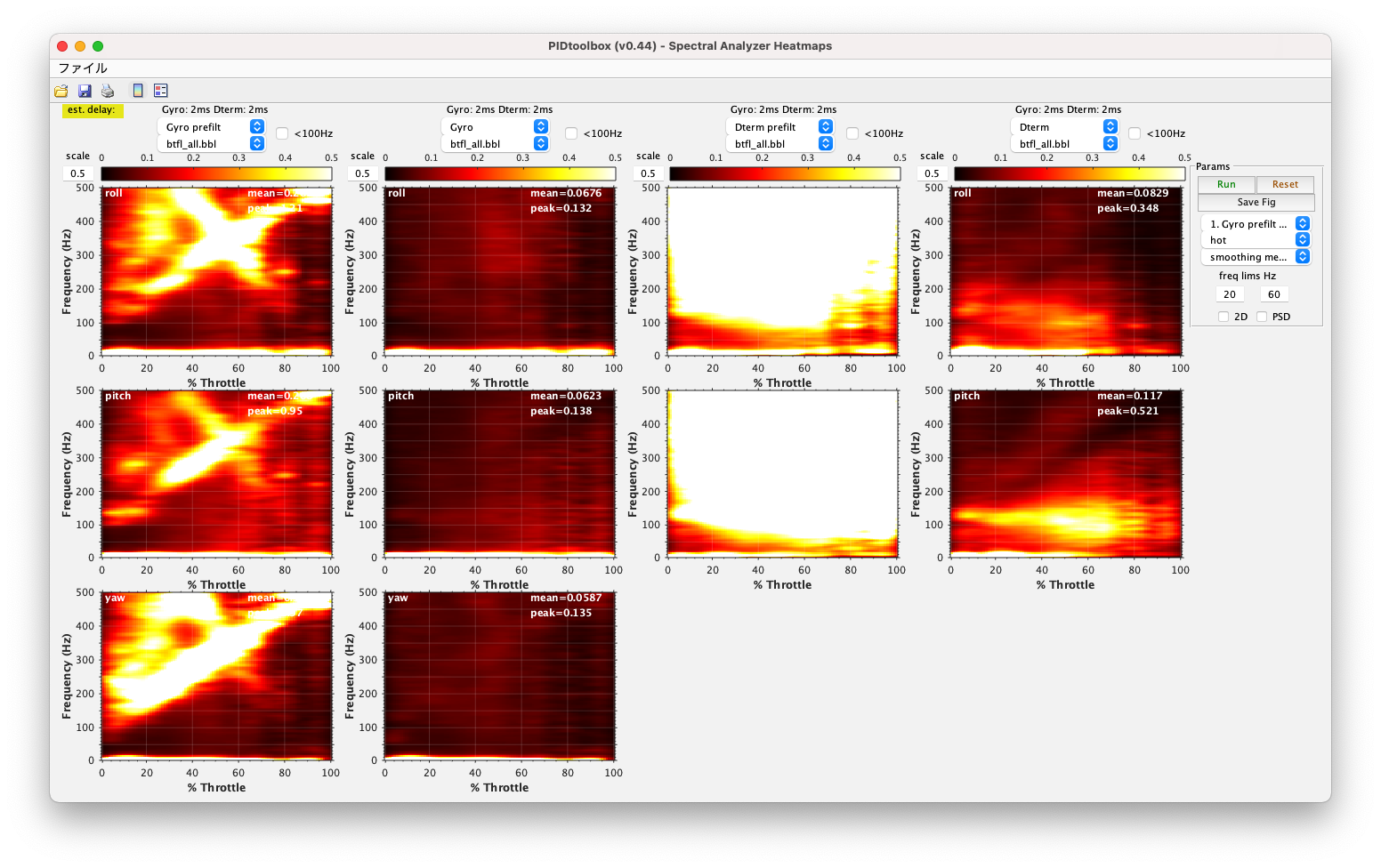
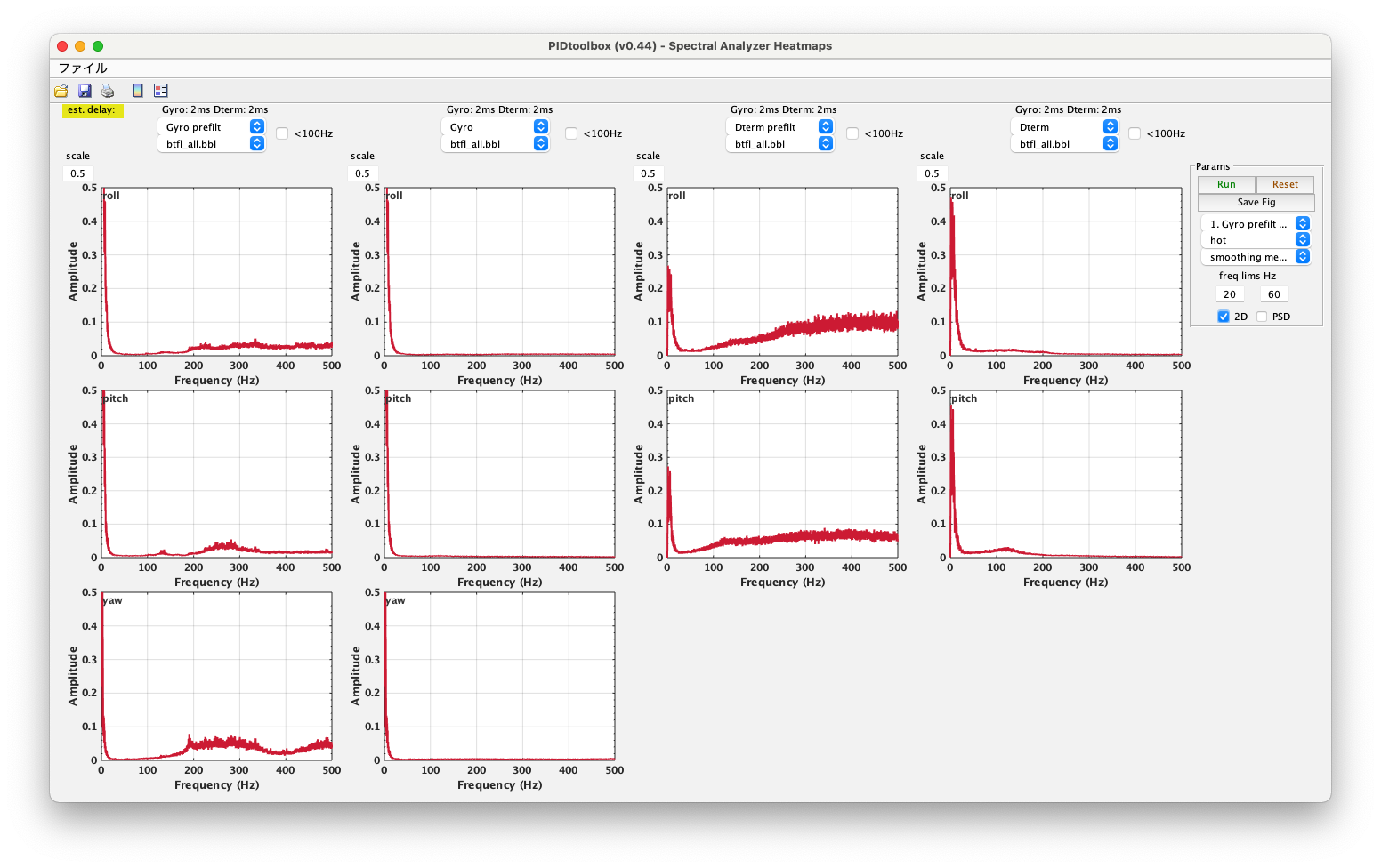
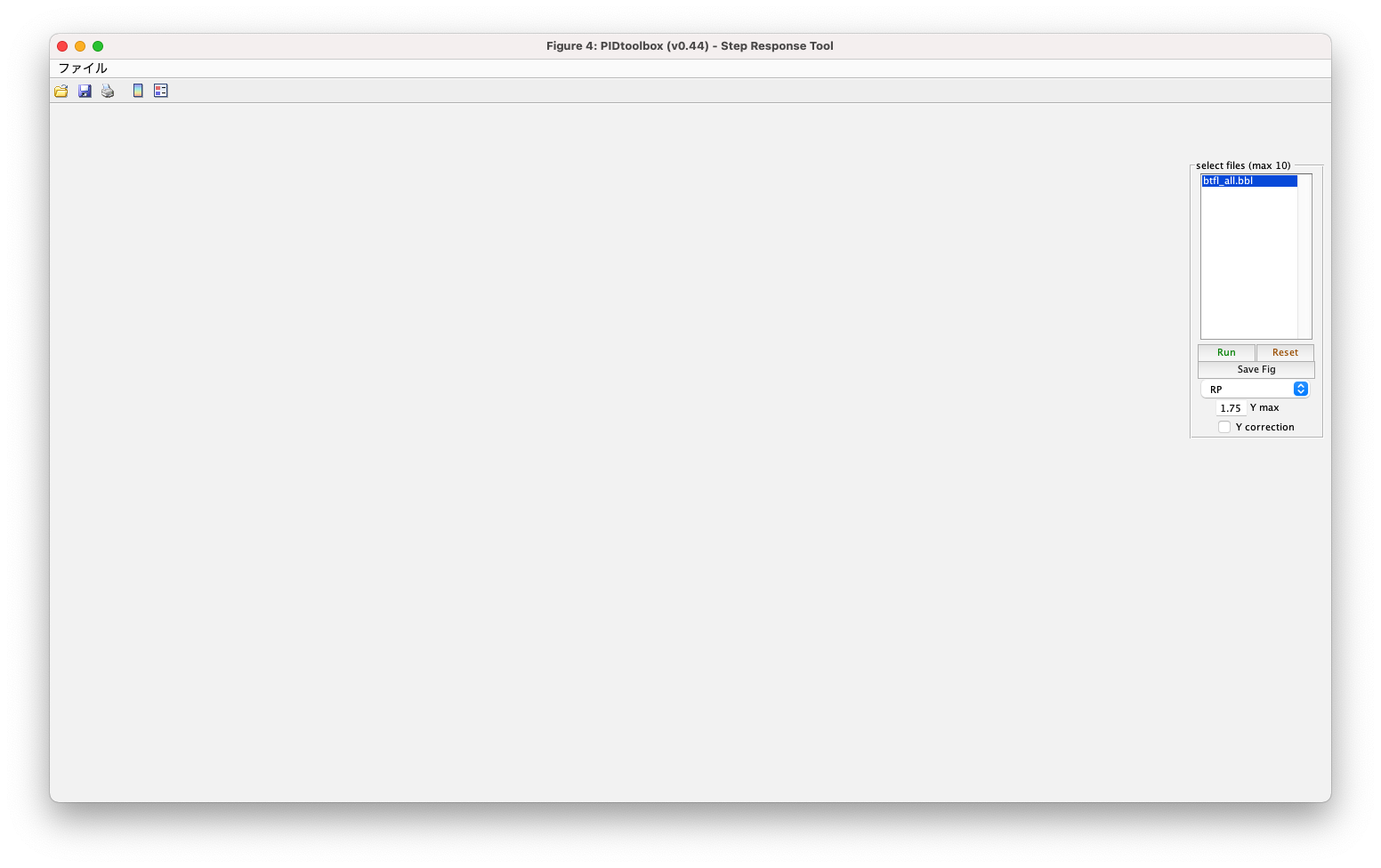
PIDtoolbox v0.44を導入してみたら随分と画面が変わっていて戸惑いました。以前に書いた記事とだいぶ変わってしまったので、改めて画面の紹介をしておきます。v0.44で追加された機能などは考えず、自分が見たい画面のみの紹介です。
導入方法などは以前の記事 を御覧ください。
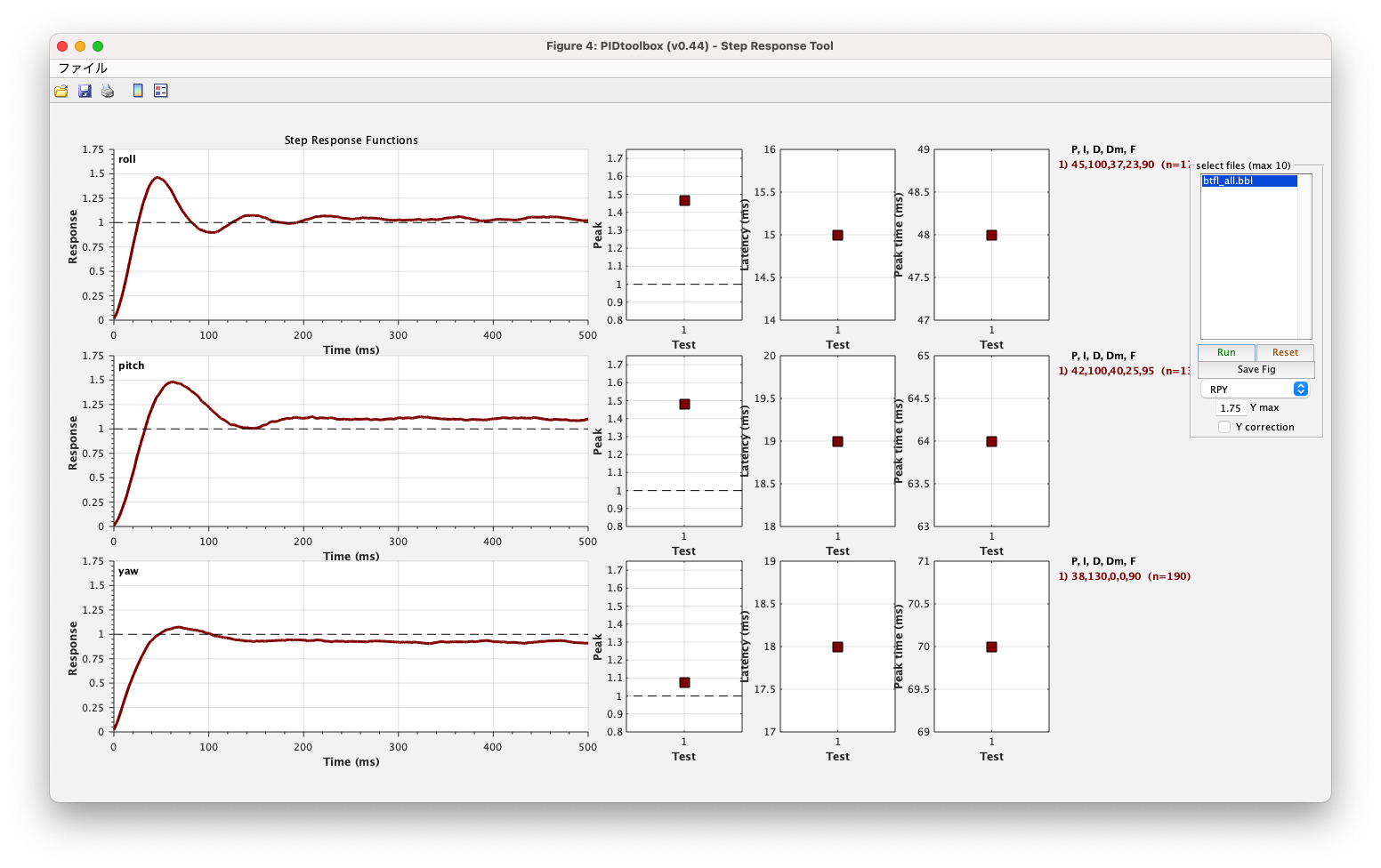
次はPIDの状態を確認します。最初の画面に戻ってStep Resp Toolをクリックします。
久しぶりの完成機ですし、なるべく箱出しの状態で飛ばしてきました。
飛行前に行ったこと、
手持ちの650mAh, 750mAhのリポで快適に飛びます。わたしが普段飛ばしているような軽いフリースタイルはまったく問題なくこなせます。
[ 飛行時間 ]
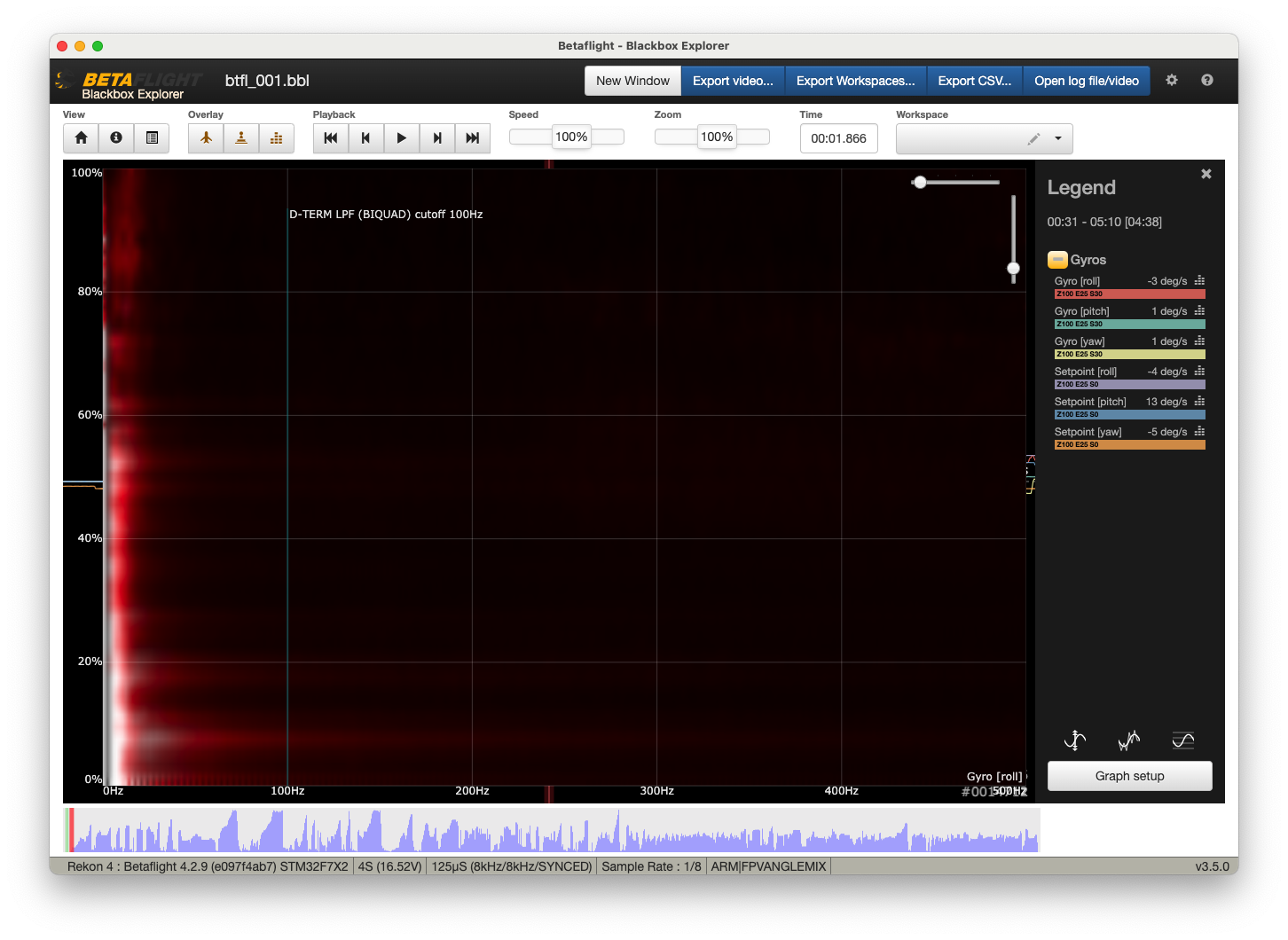
[ Blackboxログ ]
[ 機体のゆれ ]
[ GPS ]
次はRPMフィルターを設定し、Betaflight 4.2.0から最新に更新してログの取り直しを行います。もし間に合えばLi-ionバッテリーのテストも行いたい。
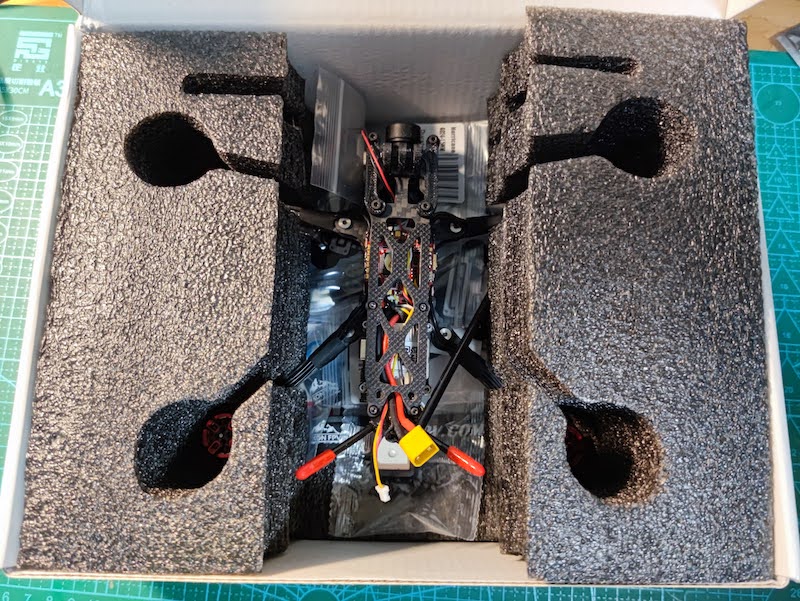
多分、3年振りくらいにFPVドローンの完成機(PNP)を購入しました。HGLRC Rekon 4 LR Caddx Vista/Polar搭載版です。まだ最低限の設定を済ませただけで飛ばしてはいませんが開封レビューをしておこうと思います。
Rekonシリーズはマイクロロングレンジという新しいジャンルを生み出したDave_C の設計による機体です。それをHGLRCが販売しています。この組み合わせは申し分ありません。手に取った瞬間に一分の隙もない完成度の高さを感じられます。はんだ付けのクオリティーも高い感じがします。
付属品はプロペラが2種類とGoPro Liteマウント、REKON FPVステッカー、説明書等です。
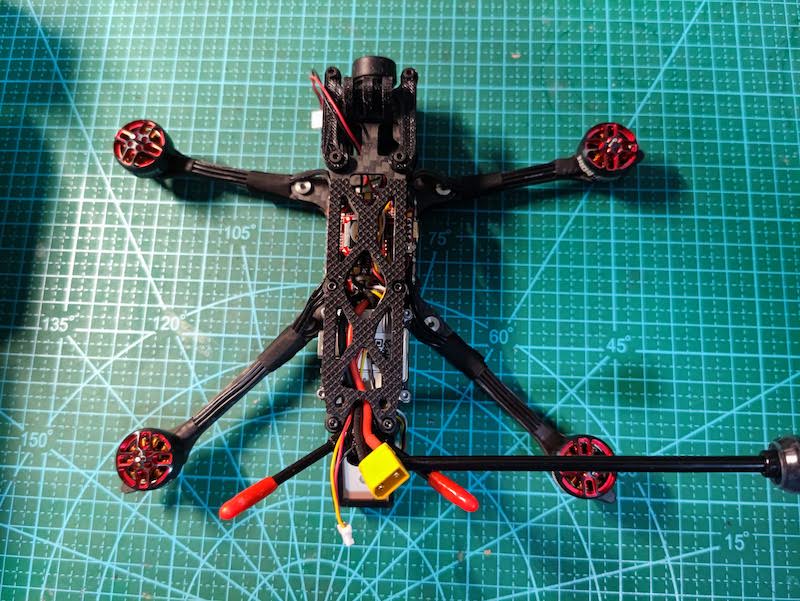
本体からは2つのコネクターが出ています。ひとつはGoPro Liteの電源でVBATから電圧が供給されています。黄色い線は付いていません。もうひとつはPNP機なので受信機用ですがコネクターがそのまま挿せる受信機は存在しない気がします。5V、GND、R1(SBUS用)の3本の線が接続されています。
プロペラは2枚羽のGEMFAN 4024(2セット)と2枚羽で折りたたみ式のGEMFAN F2019(1セット)です。初めての折りたたみペラを入手です。何となく折りたたみは重いのではないかと思っていましたが、実際には4024より軽かったです。どちらも試してみますがF2019がメインになりそうな予感です。
Betaflight 4.2.0が入っていました。ざっと見たところGPSレスキューも設定済みのようです。RPMフィルターは設定されていません、これはESCがBLHeli_Sなので仕方なし。フィルターはスライダーでジャイロフィルターが弱めにしてありました。PIDはスライダーを使わずに全てやや強めな感じです。良い設定が出ていることを期待します。
デジタル版ですのでCaddx Vista搭載です。カメラは最新のPolarが付いていますのできっとDVRでも綺麗な画像が撮れそうです。
重心もほぼ完璧です。
上海も雨続きで、テスト飛行が待ち遠しいです。まずは出荷時の設定で飛ばしてログを取る予定です。