FPVドローンを組み立てて最初にリポを接続する時はドキドキします。簡単にテスターでショートしていないかどうかは確認することは当然ですが、それでもまだ心配(VTXの誤配線などなど)はあるので海外のビデオなどではスモークストッパーと称してリポと機体の間に電流を制限するために電球を入れたりしています(と同時に電流が流れすぎると電球が明るく光る)。いずれは同じものを作ろうと思っていましたが、電球を使うのも今ひとつな気がしてのびのびになっていました。

電球を使う代わりに電子回路で過電流を防止する製品を使用するのが楽そうで良いのですが、過去に見てきた製品は、なんか今ひとつで手が出ませんでした。VIFLY ShortSaverはYouTubeでJoshua Bardwellが褒めているくらいで、今までの物とは少し様子が違います。機能としては1Aもしくは2A(スイッチで選択できる)を超える電流が流れると遮断するものです。説明によると回路がショートしている場合は3ms、一般的な過電流の場合は10msで遮断されます。ジャンパーの変更により、もう少し時間を長くすることも可能です。
実際にDJI FPV搭載5インチ機で試してみると1AだとFC/ESCの初期化が終わってモータービープが鳴り始めるところで遮断されました。2A設定だと遮断は発生しません。1A設定でも遮断されるまでに十分に時間があるので機体に問題が無いことは判別可能です。
おそらく、誤配線などからちゃんと機体を守ることが出来そうな気がします。多分、2Aの設定で使っていくと思います。
gopro-remote-stickCはまだ開発が始まったばかりということもあって機能も単純ですし接続できるGoProも一台に限られます。FPVドローンで使用する場合、録画開始、停止だけ出来れば良いのですでに十分に役に立つものになっています。
ところが複数のGoProを使用しているので接続できるのが一台だけでは困ります。M5StickCは安価ですし、GoProの数だけM5StickCを準備しようかと考えているうちにブログラムに手を入れずに解決する方法を思いつきました。思いついただけで実験する前にアイデアをTwitterのスレッドでつぶやいたところpapalagi.orgさん(M5StickCを使っている皆さんウオッチした方が良いですよ)が検証してブログに書いてくださいました。
アイデアはとても簡単です。gopro-remote-stickCは接続するGoProのSSIDとパスワードをソースコードに書き込んで使います。そのプログラムのファイル名を接続するGoPro別に変更して複数持つだけです。具体的な方法については、先のpapalagi.orgさんのブログに書かれていますが、私の別のやり方を簡単に紹介しておきます。
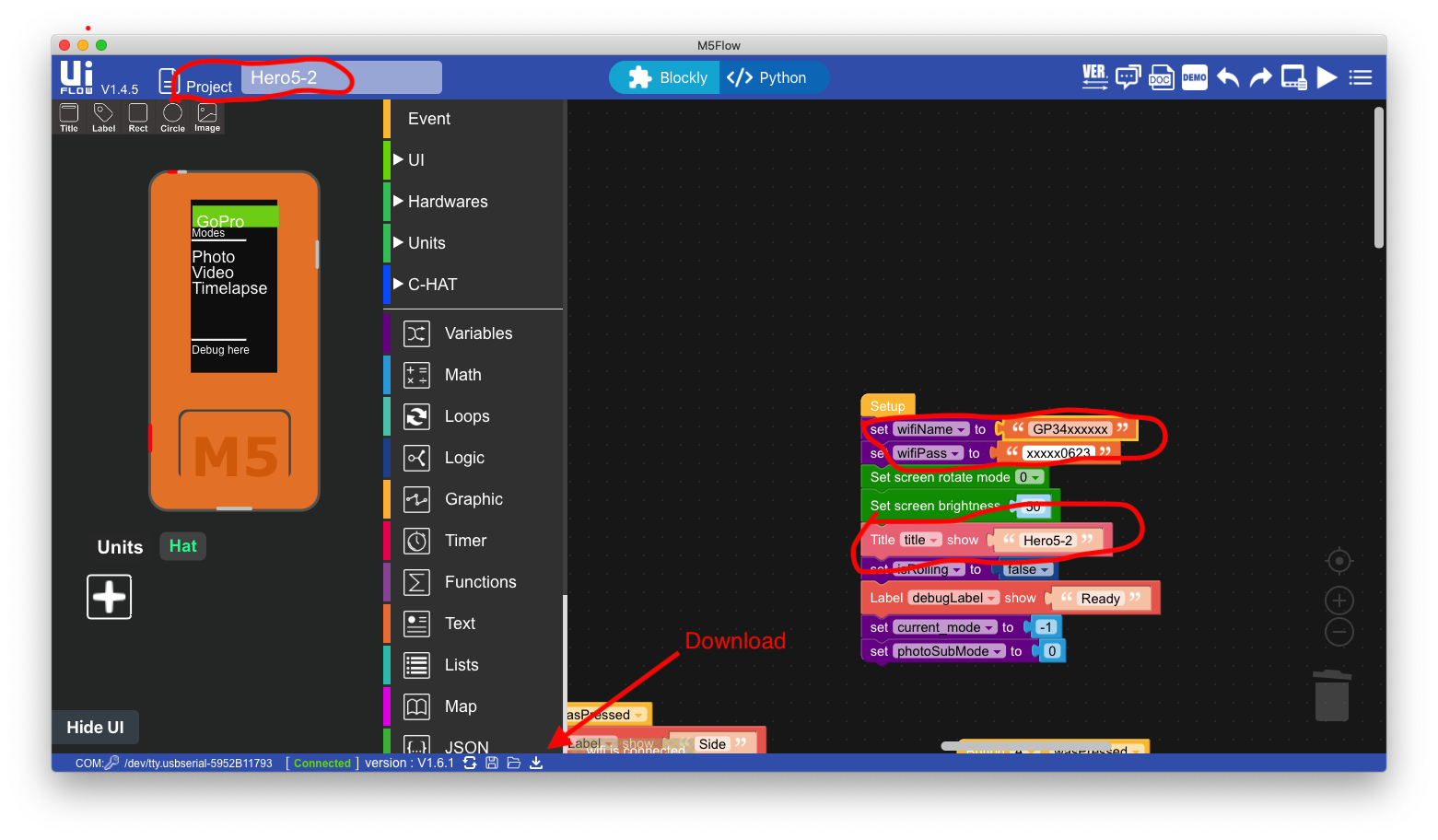
UIFlow DesktopでM5StickCをUSB接続していることを前提としての説明です。M5StickC側でUSBインターフェースを選択する方法はpapalagi.orgさんのブログをご覧ください。
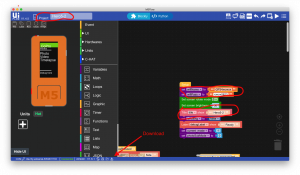
GoProのSSIDとパスワードは上の画面のwifiNameとwifiPassに設定します。それに加えて左上のProjectの名前を接続相手を分かるようにします。Downloadすると、これがM5StickC上のプログラムファイル名になります。もうひとつtitleも同様に接続相手のGoProを識別出来るものにしておきます。プロジェクト名と同じにするのが良いでしょう。これにより実行中のプログラムのタイトルをみれば、どのGoProを対象としたプログラムかがわかります。
この手順でプログラムが増えていきますが、不必要となったプログラムを消す時はpapalagi.orgさんのブログに書かれているVSCodeを利用すると良いようです。
GoProの録画開始停止を行うもうひとつの方法です。

M5StickCという小さなコンピューターをGoProのリモコンにしている人がいるとの情報を見かけたので試してみました。最初はC言語で書かれたM5GoRemoteというのを試しましたがうまく接続できませんでした。開発者はHero4でテストしていて新しいのでも動くんじゃない?というスタンスですので致し方なし。その後papalagi.orgさんが実験的にコードに手を入れて接続は可能になったようですが、今ひとつみたいな感じです。
もうひとつUIFlowというプログラミング環境を使用したgopro-remote-stickCというものをpapalagi.orgさんがブログで紹介されていますので、それを試してみました。必要最低限の機能しかありませんが、問題なく動きます。WiFi接続に必要な時間も短いですし、本物のGoPro Remoteと値段は比べ物にならないくらい安いですし、これはかなり有効なソリューションと言えます。
最初、導入に苦労しましたが、必要なことは全てpapalagi.orgさんのブログに書かれていますので詳細は、そちらに譲ります。ここでは、予め知っておいた方が良いことや私が迷ったことについて書いておきます。
まず最初に把握しておくべきなのはそれぞれのボタンの役割です。UIFlowがロードされた状態での各ボタンによる操作はUSBモードへの切替方法という記事を見ると良くわかります。最新のUIFlowですと画面がかなり変わっていますが、基本操作は同じです。
開発環境にはUIFlow Desktop IDEとブラウザー版のふたつのIDEがあります。Desktop版はUSB経由でM5StackCに接続します。ブラウザー版はWiFiネットワーク経由で接続します。ブラウザー版の場合、M5StickCも自宅などのWiFiに接続しておく必要があります。SSIDとパスワードはM5BurnerなどでUIFlowを書き込む時に同時に設定します。WiFi接続されるとM5StickCにAPI Keyが表示されますので、それに基づいてブラウザー版IDEはM5StickCと接続されます。Desktop版でUSB接続する場合はM5StickCのSetupでUSBを選択する必要があります。またGoProのアプリを起動したあとはWiFi接続がGoProを探しに行ってしまうのでブラウザー版IDEに接続する場合はM5StickCのSetupから正しいSSIDを選択する必要があります。
ブラウザー版の方が新しいデバイスやソフトウェアに対応しているので、こちらを使用したいのですが、ユーザープログラムの読み込みがうまく行きません。papalagi.orgさんのブログにあるようにDesktop版からpythonコードのコピペが必要です。おそらく何かしら解決方法があるのでしょうけど、今の所見当たりません。Desktop版でUSB接続すれば問題はありませんが、これも毎回M5StickCのSetupでUSBを選択する必要があります。
現在のところ、GoProの状況を見ることはできませんし、一台のGoProにしか接続できないアプリケーションですが十分に実用になると思います。複数のGoProに接続する方法は、次の記事で紹介する予定です。
BetaFPV 95XフレームにはBetaFPV GoPro Liteを搭載していましたが、かなりpropwashがひどくダイブとまでは言わなくとも機種を下に向けるだけでフラフラしていました。Cinewhoopですし、そういう飛び方をしなければ良いのですが3Sで飛ばしていたumma85よりも飛ばしにくい気がしました。
フリースタイル的に飛ばすためにumma搭載toothpickにすることも考えましたが、まずはumma95を試してみることにしました。umma95は基本的にはCaddx Vistaを載せること以外はumma85と変わりません。独自に変更した部分を中心にかいつまんで書いておきます。

機体スペック
BetaFPV 95X Frame
BetaFPV F4 AIO FC 12A V2
BetaFPV 1106 5000KV
HQProp DP T2.5X2.5X3
TBS Crossfire Nano RX
Caddx Vista
BetaFPV BEC Board half
Naked GoPro Hero6 Black
VISTAマウントをオリジナルの垂直から水平に変更した。おそらくTPUなら問題ないのですが、PLAで作ったため、縦置きだとちょっと転んだだけでアンテナマウントが壊れてしまうことへの対応です。既存の造形の合わせ技で作りました。

これはumma95の標準ですが下側はVTXカバーから脚に変わりました。これはハードに着陸しても壊れず安心です。またCrossfireの受信機は、この中に格納しました。
これが一番の変更点ですが、ummaのカーボンプレートを2枚使いGoProボードの保護を図りました。これは以前、操縦不能に陥って墜落した時にGoProボードを物理的に壊したことの対策です。わたしのオリジナルアイデアではなくて、何方かがFacebookで紹介されていた手法です。


GoProメインボードには半分に切断したBetaFPV BECボードのBEC側を搭載しています。電源としてVBATをBECボードに供給しています。

LED_StripによるGoProコントロールも設定しています。加えてボタンのついたリボンケーブルも接続しています。これは主にはマイクを接続するのが目的です。これによりモーター音の録音と音声コマンドの使用が可能になります。

GoPro Liteを搭載した時はPropwashが酷かったのですが、umma95にしてから嘘のようになくなりました。ロープロファイルな形状が良いのかプッシャーが良いのかはわかりませんが見違えるような飛び方です。
チューニングも軽く行っていますがBetaflight 4.2にHD向けプリセット(4.2 Tuning Notes参照)+RPMフィルターだけで良い感じに飛びました。
フィルタースライダーは、何時ものように少しづつ右に動かしながらテストしました。1.4まで行ったところでfly to the moon(意図せず上昇)になりモーターの加熱が認められました。おそらくは1.1か1.2くらいが安全な感じでした。
まったりとした飛びにしたいのでStick Resposeは0.7にしました。ややbounce backが感じられたのでPDバランスを1.1にしてみましたが、戻してみてもbaounce back自体がなかなか確認出来なくなったので良くなかったかどうかは良くわかりません。propwashも少しだけ残っているのでPIDはもう少し追求していく余地があるかも知れません。Cinewhoop的な飛ばし方をする分には、このままでまったく問題はありません。
まだチューニングの途中ですが、まったりとしたフリースタイルがこなせる機体になりました。
GoProを使い始めて約1年になります。設定などは先人たる世界のFPVドローンパイロット達が公開している設定を真似て使用していました。カラーは当然の如く皆さんFlatを使用しています。出来るだけ情報量を多く記録しておき編集で好みの色合いに設定するわけです。完全に素人なので、その編集でカラーコレクト(ノーマライズ)する方法も色々な人が公開している方法をかいつまんで行っていました。概略を言うとパレード図というのを出してColor Wheelsでレンジを広げたり黒いところ、白いところを基準に合わせて行くみたいな感じでした。これが次のYouTubeを見てまったく違うやり方になりました。
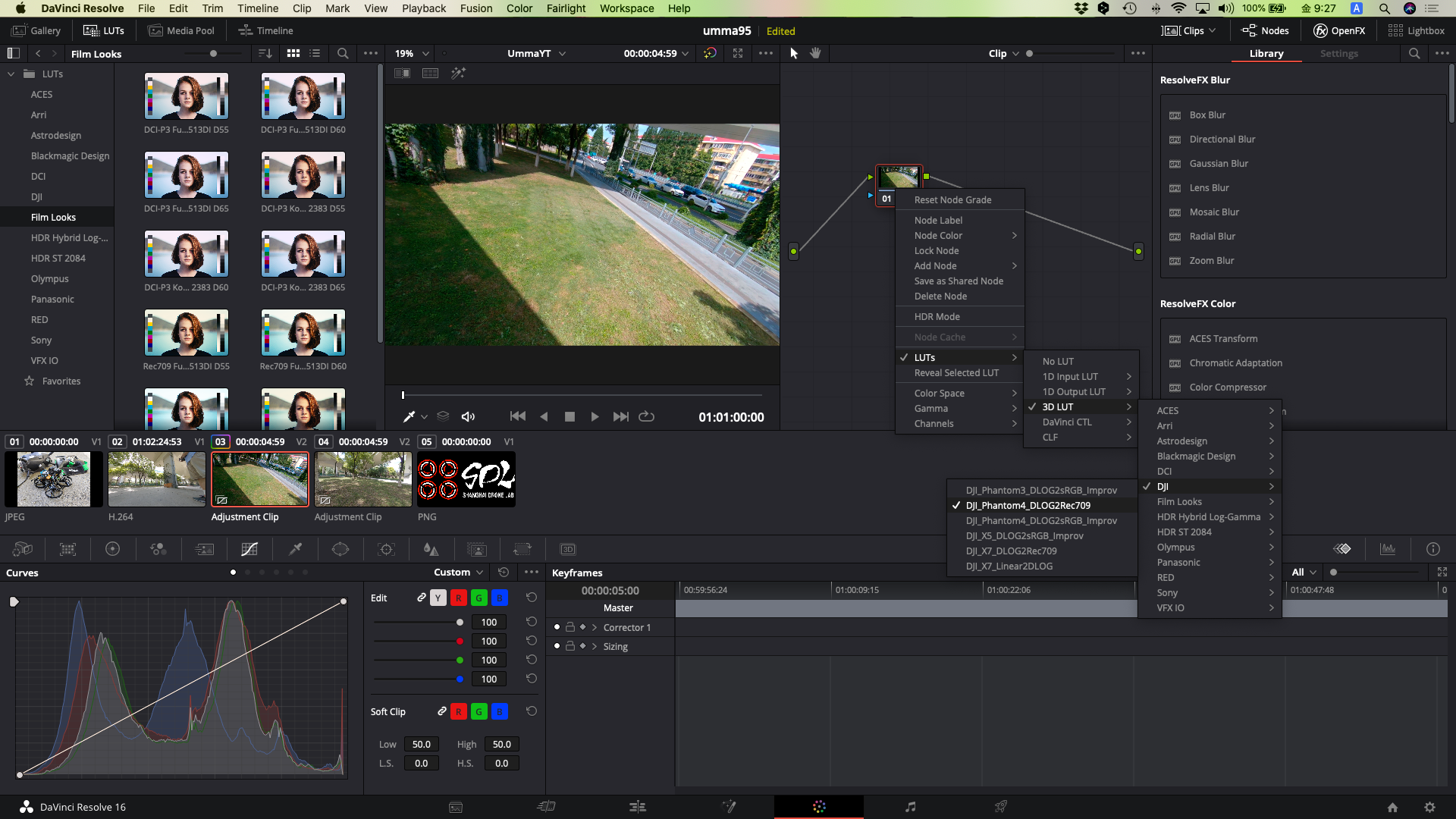
全然、用語も知らないし、同じDaVinci Resolveなのに見たことのない画面やテクニックで驚きます。この動画が始まってすぐに、まあとりあえずLUTは当てときましょうって言ってます。LUTって何?状態です。どうもカメラ毎のLog映像に合わせたプリセットらしいです。ところがDaVinci Resolveの画面を見てもGoPro Flatというのが見つかりません。ググってみるとGoPro用のLUTなどもネット上にあるようですが、DJI_Phantom4_DLOG2Rec709というDaVinci Resolveに最初から入っているものを適用しても良い結果が出るという情報を見つけました。
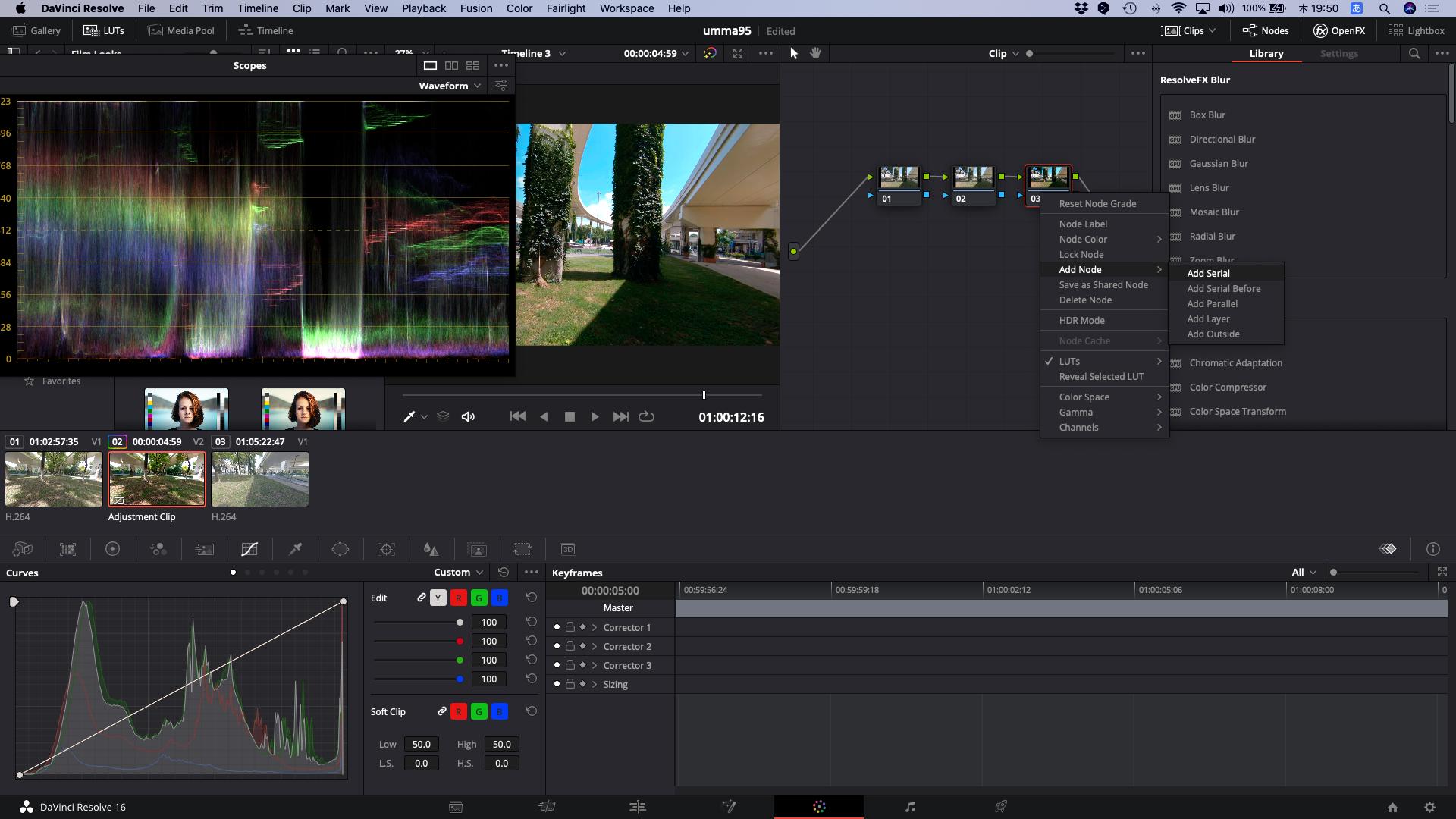
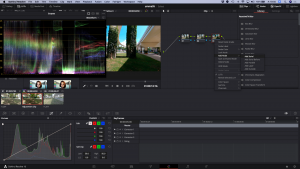
試してみると、驚くほど綺麗に仕上がります。先の動画だと、これをベースにもっといじるまでが基礎の基礎らしいです。見様見真似でやってみてはいますが、撮影条件やGoProのモデルにもよるでしょうけど、わたしの技術的にはLUT適用だけでも大差が無いかもしれません。詳しい手順は先の動画を見ていただくのが良いですがLUT適用のところだけ画面を紹介しておきます。
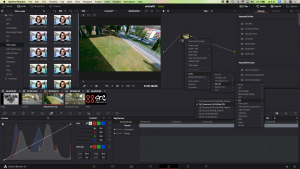
カラーの調整はColorタブの中のノードに対して行います。ノードを右クリックして目的のLUTを見つけたのが上のスクリーンショットです。
先の動画の説明にあるように他のカラー要素をいじるときには要素毎にノードを追加して行うとノード毎にリセット出来るのでやり直しが簡単になります。ノード上で右クリックしてAdd Node/Add Serialを行うと良いでしょう。
複数クリップに同じ調整をするのにはAdjustment Clipを使うなどという話しもしたいところですが、長くなりますし、探すとすぐにやり方は見つかると思います。
実際にLUTを適用したわたしの動画を紹介しておきます。最後の方は、さらに微調整に挑戦していますが、実のところLUTを適用しただけのものと大差がない気がします。
いろいろ設定中に気がついたのですが、GoPro Remoteや携帯電話のアプリから接続が出来ないことがあります。WiFiの電波が発信されていません。ただし送信機やRECボタン、音声コントロールは正常に作動し録画できますので、現象自体になかなか気づきませんでした。また、色々と操作しているうちにWiFiが発信されるようになることもあります。
原因は簡単なことでした。送信機とBetaflightの設定によりGoProの電源が上がる時にRECボタンが押されている状態になっていたからでした。どなたかがTwitterで似たようなことを書かれていたような気もします。それですぐに思いつきました。物理的なRECボタンを押したままGoProの電源を投入しても同じ現象が再現できます。
BetaflightのサイトにBetaflightの設定ガイドがありますが、実はそこにもわざわざ赤字で注意されていることでした。

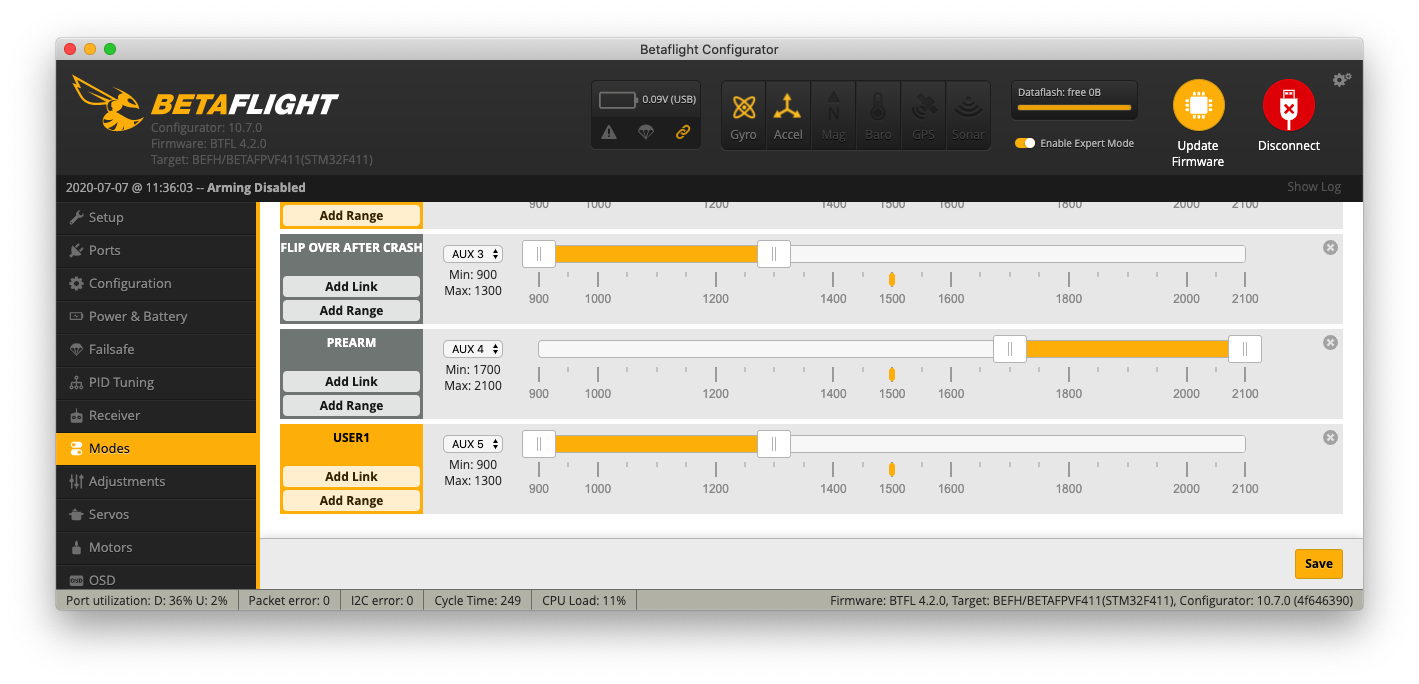
これが私の間違った設定です。USER1は送信機のモーメンタリスイッチがオフだと左端、オンすると右端に移動しRECボタンを押下した状態になります。問題なく構成できているように見えます。ところが、機体の電源が投入され送信機と接続される前はUSER1は中央値1500になります(failsafe画面で変更も可能です)。それだとRECボタンを押していることになってしまいます。GoProメインボードには自動電源投入のジャンパーが施されていますので、電源投入時には常にRECボタンが押されていることになります。

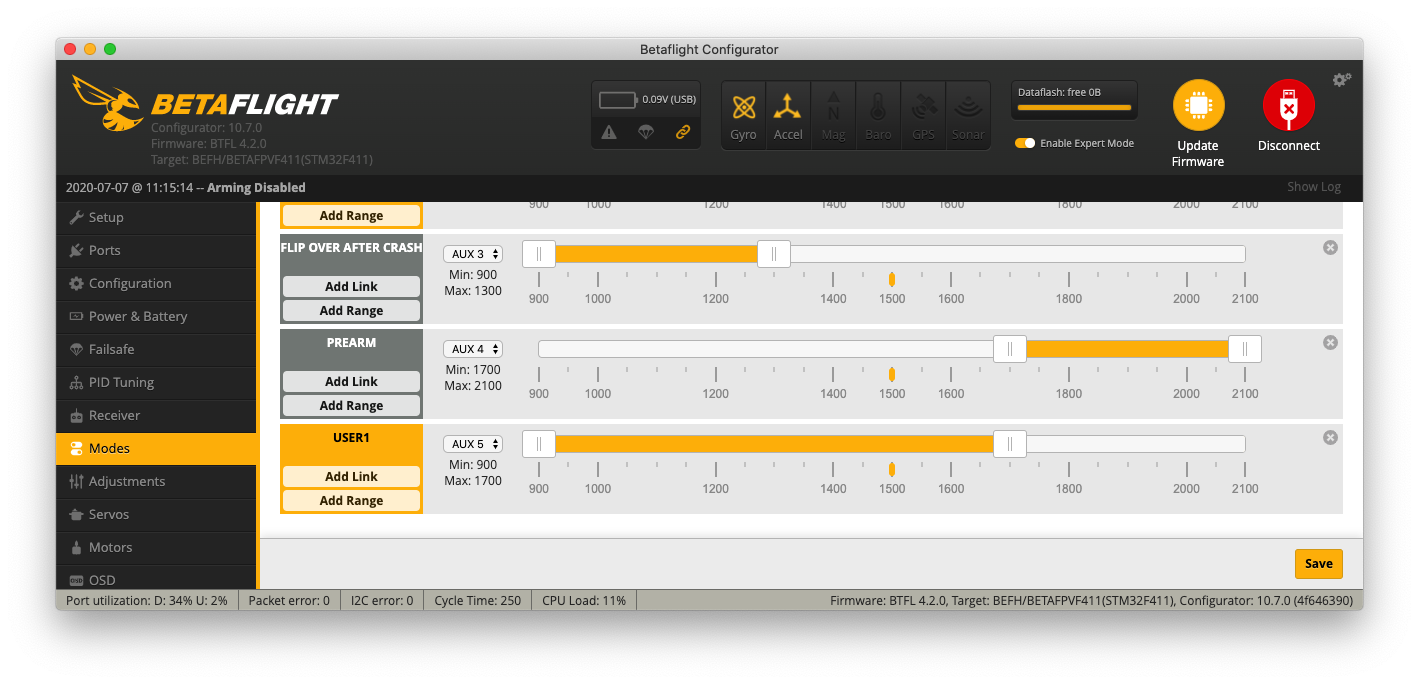
対策は簡単でUSER1が1500になっている時にはオフ(左端と同じ)になるように設定するだけです。failsafeで受信機が信号を送ってこない時の値を変更して対処も出来ますがあまり一般的とは言えません。
相変わらず剥きプロへの道を探求中です。今回はGoProの録画開始及び停止の方法についての考察です。タイトルで4種類の方法と書きましたが、携帯電話アプリを含めると実際には5種類になります。設定変更をする場合を除いて飛行前に携帯電話をGoProに接続するのは時間がかかりすぎますので除外します。
1. 押しボタンを使用する
一番普通の方法です。わたしもGoProから外したボタン付きのケーブルを、そのまま利用してボタンが押せるようにしています。確実ですが、あまり操作しやすいとは言えません。外付けのボタンをどこか押しやすい場所に設置するのは考慮に値すると思います。FPVをしばらくやっている人だとカメラ設定用のコントローラーが余っていると思います。これのボタンをひとつ外して使用すると良さそうです。

2. 音声コントロール
試してみるとなかなか快適に動作します。ただしマイクロフォンが生きていないといけません。今の所、そのためには先のボタンのついているリボンケーブル(これにマイクが載っています)を接続して置く必要があります。したがってBetaFPV GoPro Liteなどでは使用できません。
日本語ならば「GoPro ビデオスタート」と「GoPro ビデオストップ」だけ覚えておけば大丈夫です。わたしは念の為、リポを抜く前に「GoPro 電源オフ」も唱えています。設定により電源オンも出来ますので、おそらく電源を自動的にオンにするジャンパーも省略出来ると思います(未検証)。
3. GoProスマートリモート
純正品のGoProスマートリモートARMTE-02を試しています。新品はそこそこの値段ですが、中古(らしきもの)を手頃な価格で入手しました。複数のGoProを接続できますが、その目的は複数のGoProを同時に録画開始、停止させるものです。したがって複数のGoProから一台を選択してコントロールするような事はできません。私は今の所、剥きプロ一台でのテストを行っています。
使い勝手はまあまあ良いと思います。一番の利点はGoProの録画状態などの情報がリモートの液晶で確認出来ることです。録画条件の設定なども変更出来ますが、操作しにくいので試してはいません。距離もかなり離れていても大丈夫です。

4. RC(プロポ、送信機)からの操作
RECポートをFCのbuzz-に接続して(条件によっては別のポートも使用可能)送信機のスイッチで操作するもの。設定は面倒ですが使い勝手は良いです。ただし録画状態などはGoProのLEDを確認する必要があります。Cinewhoop TokyoさんがGoProのLEDの光を光ファイバーでFPVカメラの前に導いてゴーグルでLEDを確認出来るようにしています。これと組み合わせると最強です。
GoProをコントロールするもうひとつの方法がありました。
- 剥きプロ Naked GoPro への道、M5StickCによるGoProの録画開始停止
- 剥きプロ Naked GoPro への道、M5StickCのgopro-remoteを複数GoProに接続する
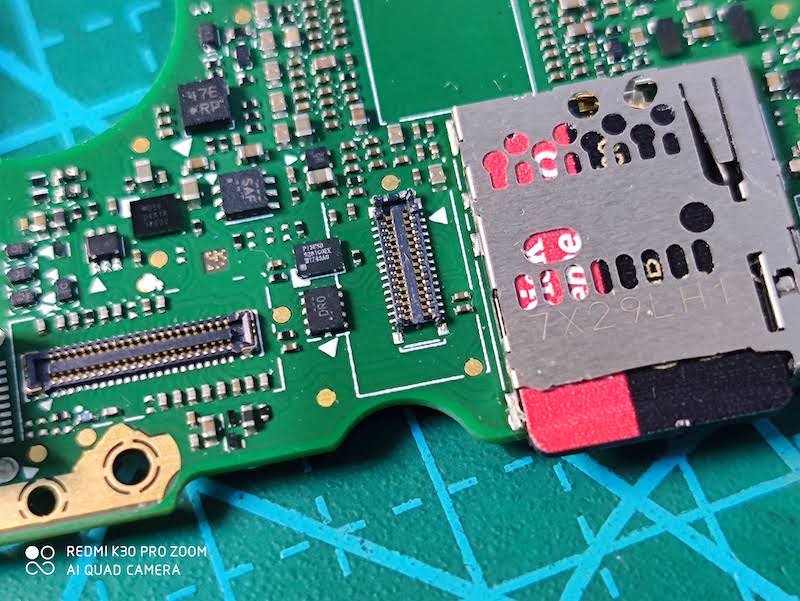
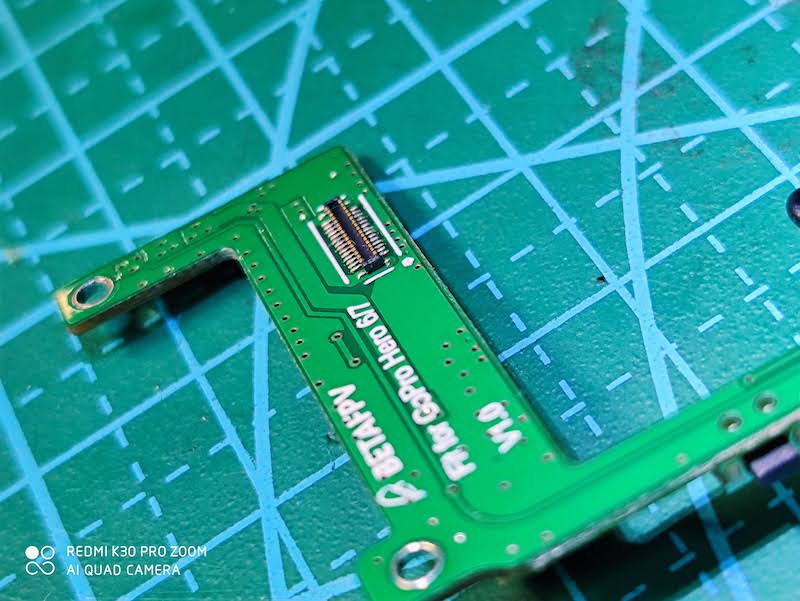
BetaFPV BECボードが原因なのかどうかはわかりませんが、BECボードを使用していてコネクターが壊れているのを発見しました。
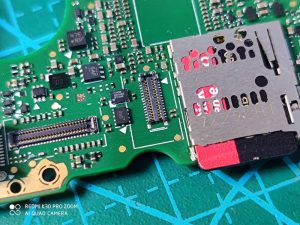
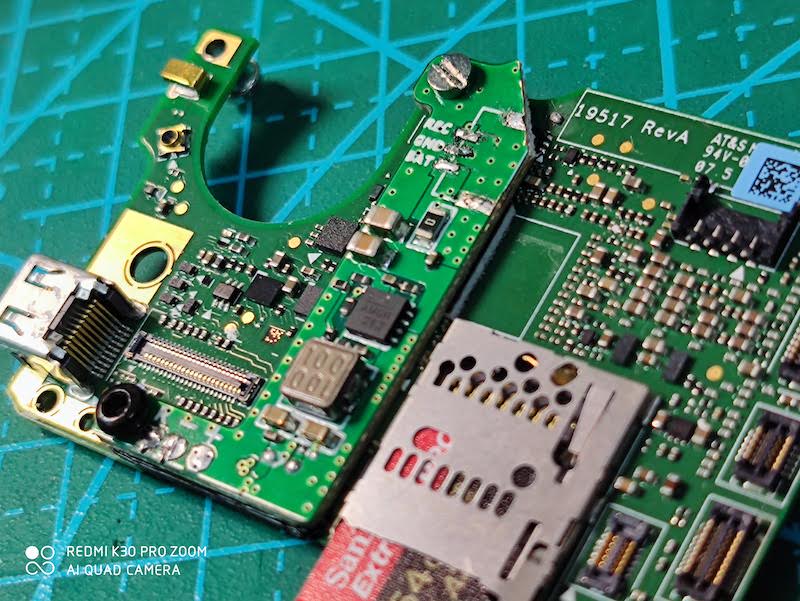
中央のコネクターの手前側(GND端子)のプラスチック部分が欠けています。反対側の端と見比べると良くわかります。

BECボードも反対の5V側が壊れています。比較のために下に正常なコネクターの写真を載せておきます。

どなたかがBECボードの寸法が正しくないと書かれていましたので、それでコネクターに無理があるのかとも思いますが、何とも言えません。私の場合テストのために何度も何度も組み立てたり分解したりしていたのが良くなかったのかも知れません。ちゃんと動いたらあまり弄らない方が良いと思われます。
剥きプロの録画開始、停止を送信機から行うアイデアは私が剥きプロに挑戦を始めた時には既知のアイデアで、それはFCのブザーポートをpinioにアサインして行うものでした。現在でもこの手法に違いはありません。ただし、私はどうしてもブザーを付けないと不安なので当初はリモートでのコントロールはあきらめて本体の押しボタンで行うようにしていました。
[ BECボードの登場 ]
-> まだ発売から日がたっていませんがBECボードv1.1が出荷され始めたようです。REC信号周りも変更があるようですが、今のところ詳細は不明です。以下の記述はV1.0に基づく話しです。
BetaFPVから登場したBECボードは剥きプロを簡単にする強力な味方です。その解説ページには、このリモートでの録画コントロールの設定の仕方が書かれています。基本的に設定の方法は既に知られているブサーポート(buzz-)を使う方法と同じです。ただし使うFCのポートがLED_Stripになっています。ブザーを外さなくても良いのはありがたいとぱかりに設定して飛ばしてみました。録画の状態は本体のLEDで確認しないといけませんが、RCで録画開始、停止出来るのはとても便利なことを痛感しました。
ところが、Facebookにてこの構成に物言いが付きました。曰く、BECボードを使っていてもbuzz-でコントロールすべきだというものです。ごく簡単に言うとGoProのRECボタンの配線にはGoProの論理回路の駆動電圧である1.8Vが何かしらの抵抗を通して現れるようになっています。一方のLED_StripはFCの駆動電圧である3.3Vがやはり抵抗を通して出ています。ふたつの異なる電圧を直接ではないにしろ相互に接続しては行けないと言うことです。RECボタンを押す動作はFCの3.3VがGNDに落ちて0Vになった時に働くので目的の動作は行なえます。BetaFPVも何の策も無しにLED_Stripを使わせようとしているわけではありませんでした。BECボード上に1KΩの抵抗を用意して、それを通してFCとGoProを接続するようにしていました。これは、何というか少しはマシになっているのか、あまり変わっていないのか良く分からない対策です。もともと生の電圧が出ているわけではなくてプルアップ抵抗を通したものです。それに対して加算される抵抗値が1KΩというのは大きな差が無い気もします。かといって、この抵抗値を大きくすると本来の目的であるスイッチとしての機能が損なわれるのは間違いないです。
LED_Stripを使っていて何かしら不具合が起こるのかどうかは分かりませんが、やはりオススメするわけには行きません。
[ それでもLED_Stripが使いたい ]
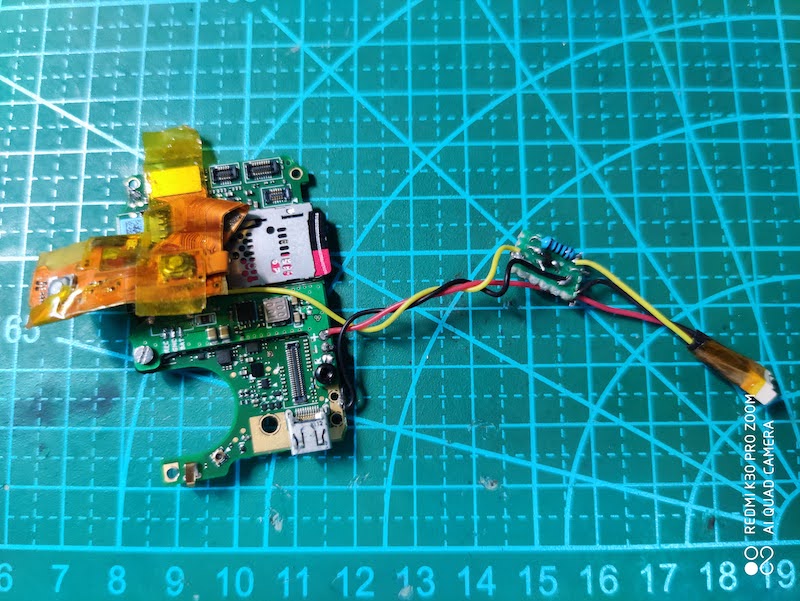
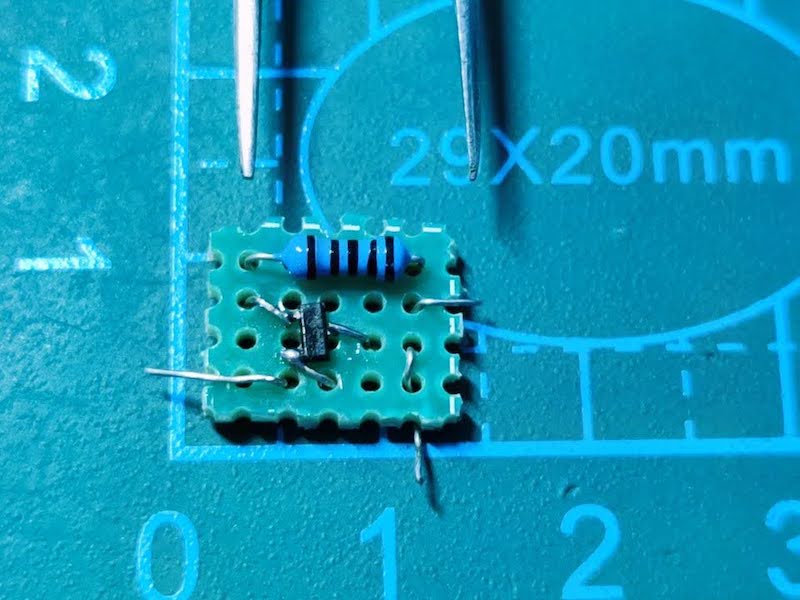
どうすれば良いかは知っていました。それはトランジスタなどでスイッチを作り間に入れることにより3.3Vと1.8Vを直接接続しないようにすることです。回路図はOscar LiangさんがUARTピンを利用してブザーを鳴らすための回路として紹介しているものを利用しました。トランジスターは米粒のように小さいBC857B、回路図中でBaseに接続される抵抗が2.2KΩになっていますが1KΩを使用しました。
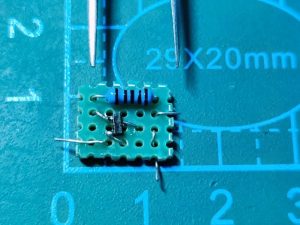
簡易スコープで測定してRCのスイッチ操作でFC側は3.3Vと0Vに切り替わることを確認、GoPro側はGoProを外した状態ではスイッチを操作しても0Vのままです。期待通り3.3VがGoPro側に漏れることがないことが確認出来ました。GoProを接続した状態で計測するとスイッチがオフの時は1.8V、オンだと0.5Vくらいでした。これは、もっと0Vに近いことを期待していたのですが、とりあえず動作はするので、このまま実績を作ってみます。1.8Vの回路においてLowの信号は出力側としては0.4V以下にしないといけません、また入力側は0.63V以下をLowとみなすことによりマージナルをとっています。測定ポイントで0.5Vというのは恐らくは動作しますが、推奨された電圧ではありません。またBECボードには抵抗が入っているのでGoProから見ると測定した0.5Vより少しだけ高い電圧になっているはずです。
トランジスターを別のものに変えたり何かしら回路的な工夫で0V近くを実現したいとも思っています。もし実現したら回路図を発表いたします。
もしこの回路が調子が悪い場合、GoProにはbuzz-を使用して、この回路をOsacr Liangさんのページで紹介されている通りにLED_Stripからブザーを鳴らすために使用するというのも悪くないと思います。
BetaFPV GoPro Lite Caseが入手出来たのとほぼ同時にDJI Digital FPVシステムとしては初めてのnanoサイズカメラCaddx Nebulaが到着したので、その両方を搭載した95Xを製作しました。マウントを自作した以外はいたって普通に組み立てた機体です。
BetaFPV 95X Frame
BetaFPV F4 AIO FC 12A V2
GEPRC GR1105 5000KV
EMAX Avan Rush
TBS Crossfire Nano RX
Caddx Nebula + Vista
BetaFPV GoPro Lite Case
Naked GoPro Hero6 Black

プッシャーとノーマルと迷ったりCaddx Vistaの置き場所で試行錯誤をして苦労していますが、出来上がりはごく普通の置き方になりました。FCの下に余裕があるのでブザーと受信機は下に入れています。アンテナを取り付けるパーツも3Dプリンターでの自作も考えましたが耐久性を考えてタイラップでの固定にしました。
BetaFPVのサイトの情報に従ってRECボタンをLED_Stripから操作できるようにしました。送信機から録画開始、停止がコントロール出来るのはとても便利なのですが、この接続そのものにFaceBook上で物言いがつきました。6パックほど飛ばして問題は発生してはいませんが、とりあえず設定方法の紹介はやめておきます。現在、対策をするための部品を調達しているので、良い結果が出たら改めてお知らせします。
GoPro標準のマウント方式を採用したので頑張ればHero5 Sessionなども積めます。

一度くらいネタで飛ばすかも知れませんが、重いので本気では飛ばしません。
3Dプリンター用のSTLファイルはThingiversのサイトで公開しています。
ハードなマウントはどんなものかと思いましたが、まったく問題なかったです。