ドローンレースでは、複数のドローンが同時に飛行するため、映像送信機(VTX)の電波が互いに干渉し、映像が乱れる問題が常に付きまといます。この電波干渉の主な原因の一つが「IMD(相互変調歪)」です。特に屋内環境での影響が顕著です。
日本のアマチュア無線のバンドプランが変更されたため、従来のE1/F1/F4チャネル以外のチャネルを使用し4機同時飛行の可能性が出てきました。やみくもにチャネル選択するわけには行かないのでIMDを算出し影響の少ない組み合わせを見出すことにしました。
この記事では、IMDの問題を分析し、より安定した映像伝送を実現するための最適な周波数チャンネルの組み合わせを探る技術的な挑戦について、その経緯と結論を分かりやすく解説します。
解説は長くなるので結論を先に書いておきます。
[ 結論 ] 現時点での最適な4波組み合わせ
長い解析とテストの結果、現時点で最も有望と考えられるのは、以下の周波数組み合わせです。
1. (E1) 5705MHz, (A8) 5725MHz, (A5) 5785MHz, (F5) 5820MHz
2. (E2) 5685MHz, (E1) 5705MHz, (F3) 5780MHz, (F5) 5820MHz
この組み合わせは、SaqooshaさんのIMDAvoiderから派生した計算ツール(IMDAvoider3)によって導き出された7つの候補の中から、実際の電波を使ったテストを経て選ばれました。
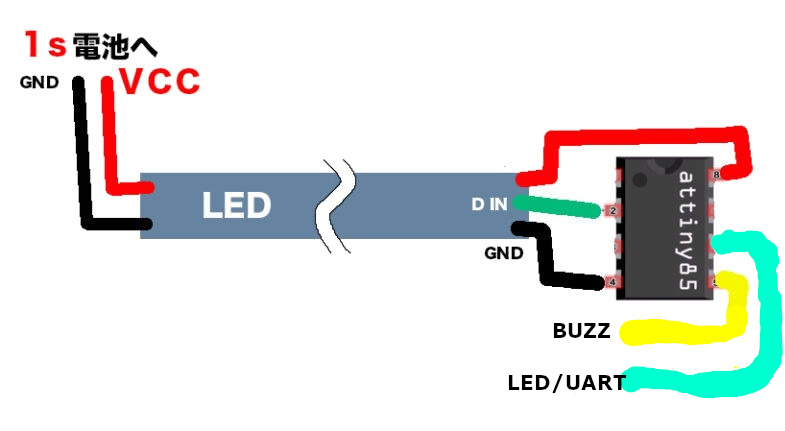
1番と2番ともに自宅でのテスト結果はほとんど同じでした。ただしBetaflightのLED機能でVTX周波数によりLED色を変えることを考えると1番が好ましいという理由により、私の推奨は1番のE1/A8/A5/F5ということにしました。
小学校の体育館での飛行テストも成功しており、実用的なレベルにあると考えています。ただし、自宅での詳細なテストでは、特定のチャンネル(E1)に時折ごくわずかなノイズが見られるなど、まだ改善の余地があることも分かっています。
[ IMD(相互変調歪)とは? ]
IMDとは、複数の電波が混ざり合うことで、本来存在しないはずの不要な周波数の電波(歪み)が発生する現象です。
二次IMD: 2つの周波数の組み合わせで発生する歪み。
三次IMD: 3つの周波数の組み合わせで発生する、より複雑な歪み。
この歪は比較的簡単な計算で求めることが出来ます。
[ なぜ新しい組み合わせが必要だったのか? ]
これまで、周波数の組み合わせ評価には「IMDTabler」というツールが広く使われていました。しかし、このツールが推奨する4波の組み合わせをテストしたところ、特定のチャンネルで映像が著しく乱れるという問題が複数のチームから報告されました。
IMDTablerは二次IMDのみを評価していましたが、報告された問題は、他の3つの周波数が引き起こす「三次IMD」が原因でした。具体的には、(F5) 5820MHz – (A8) 5725MHz + (R2) 5695MHz という計算で、問題のチャンネルの周波数である (B4) 5790MHz が生成されてしまっていたのです。
この事実はムッシーさんのXの投稿で指摘されています。また、この現象は自宅でのテストでも簡単に再現できました。
[ 新たな評価アプローチ ] IMDAvoider3
この問題を解決するため、私は新たな評価アプローチを取りました。
二次IMDと三次IMDの両方を考慮する:
三次IMDは二次IMDに比べて信号が非常に弱いことが知られています。これについてはIMDAvoiderの作者であるSaqooshaさんが詳細なスタディ結果を文書(https://github.com/Saqoosha/IMDAvoider/blob/main/docs/IMD_Research_Document_JP.md)にされています。興味がある方はご一読ください。
そのため、まず従来の計算方法により二次IMDでの成績が良いものから順に並んだリストを生成する。そして三次IMDによって生成される歪みが、使用したいチャンネルの周波数に近すぎる組み合わせを除外するという方法を取りました。つまり単純に評価点に加えるのではなく、「悪影響を及ぼす組み合わせを排除するフィルター」として利用しました。
閾値(しきいち)の設定: どの程度周波数が近ければ「悪影響」と判断するかの基準(閾値)を複数パターンで試し、机上の計算と実機テストの結果を突き合わせ、最適な値を探りました。
このアプローチを実装したのが、IMDAvoider3です。このツールによって、より実践的な評価が可能になりました。
[ 自宅での詳細テストから見えたこと ]
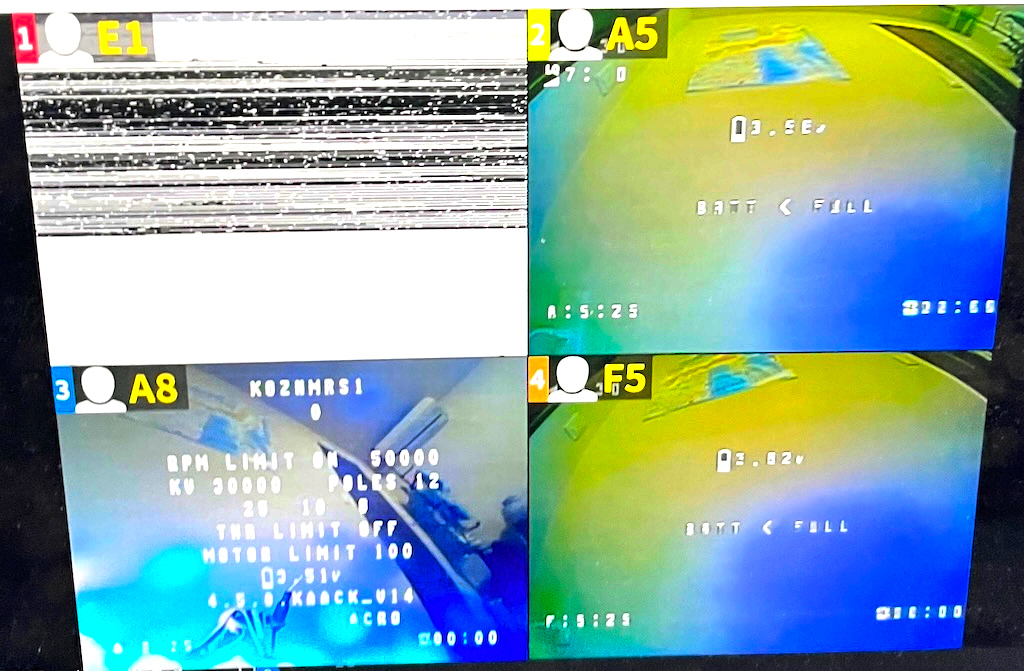
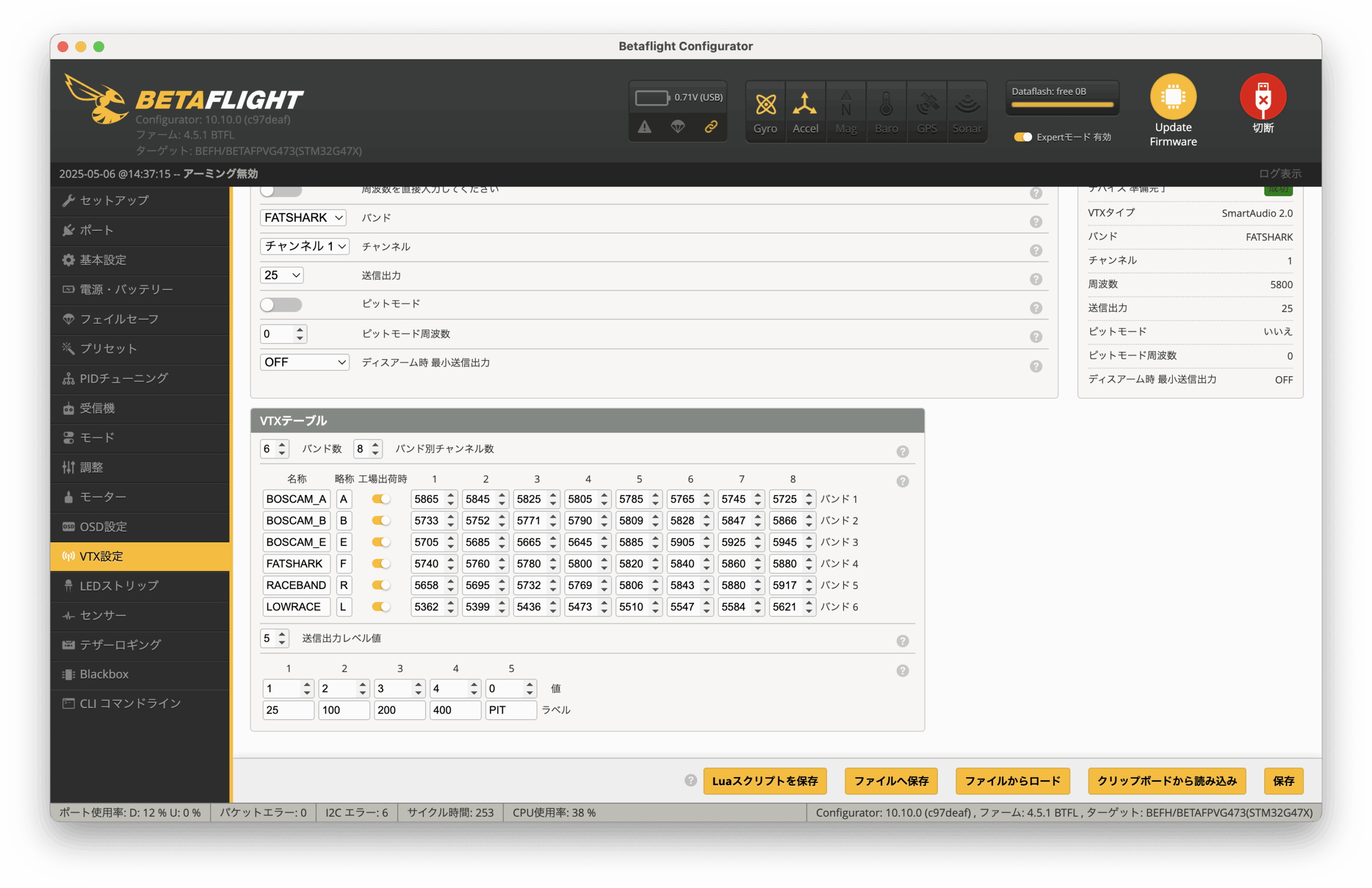
選ばれた組み合わせ(E1/A8/A5/F5)を自宅で詳細にテストしたところ、いくつかの興味深い点が分かりました。
– 4つの電波を同時に出すと、E1チャンネル(5705MHz)に時折、飛行に支障はないレベルのチラつきが見られた。
– VTXの個体差を排除するため機体を入れ替えてのテストも行い同様の結果を得た。
– E1-5705MHzとA8-5725MHzは20MHzしか離れていないので、この2波だけでテストを行なっても全く問題はない。
– E1の電波を停止してA8/A5/F5の電波を出してE1のモニターを監視するとほとんどの場合正常なスノーノイズだが時折明らかなノイズも現れる。
– 同様のテストで、A8チャンネルにもノイズが確認された。
E1(5705MHz)とA8(5725MHz)は周波数が20MHzしか離れていません。この近さが影響している可能性も考えられますが、現在の計算方法ではこの差を説明できていません。
この観測が事実であればE1/A8とA5/F5にコンディションの差があることになります。レースでの公平性を考えると、これは問題となるかもしれません。
[ スペクトラムアナライザーでの観測 ]
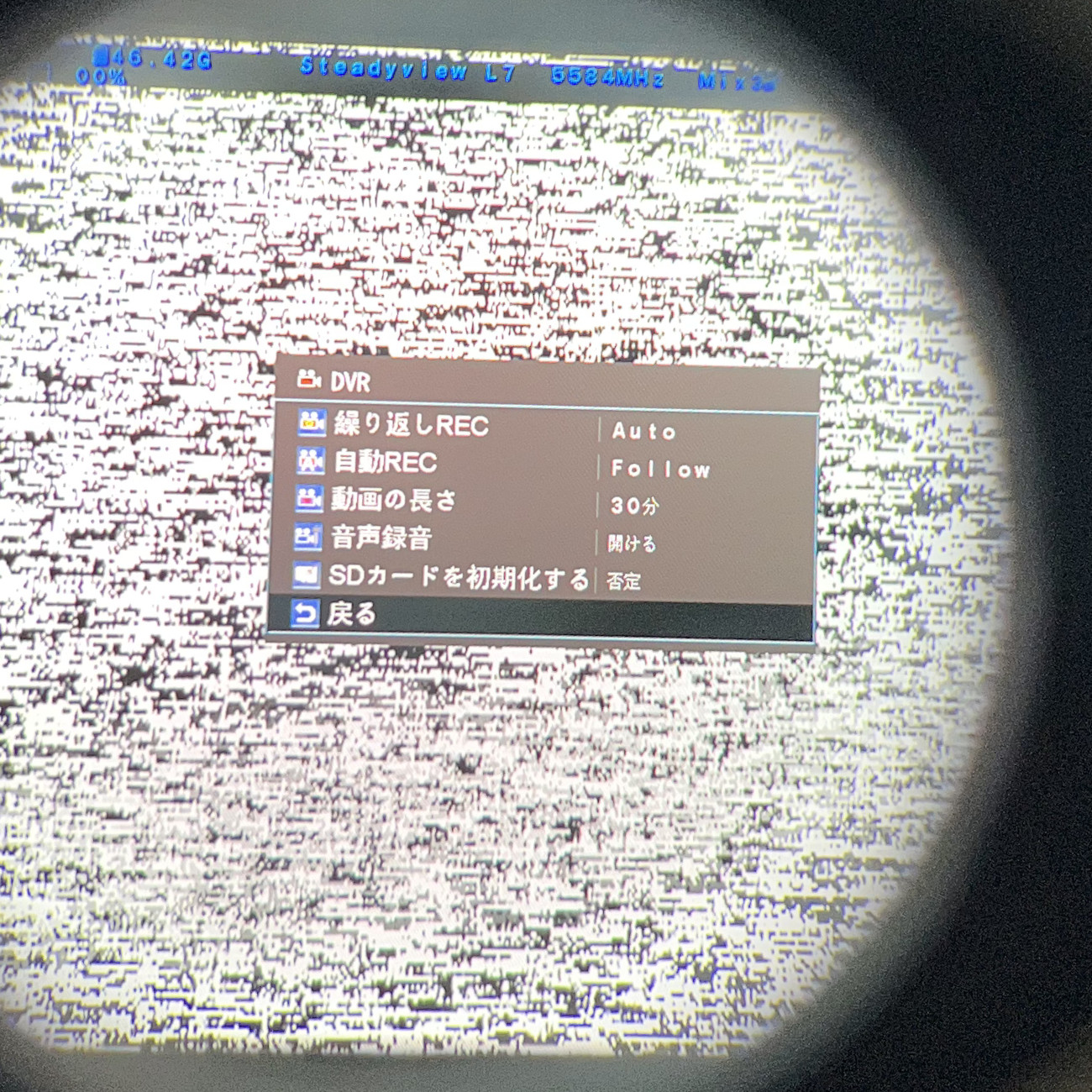
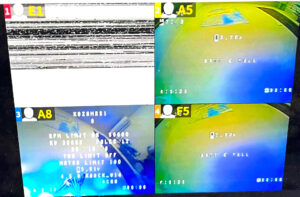
安価な簡易スペクトラムアナライザー「TinySA Ultra」を使い、IMDが視覚的に観測できるか試しました。
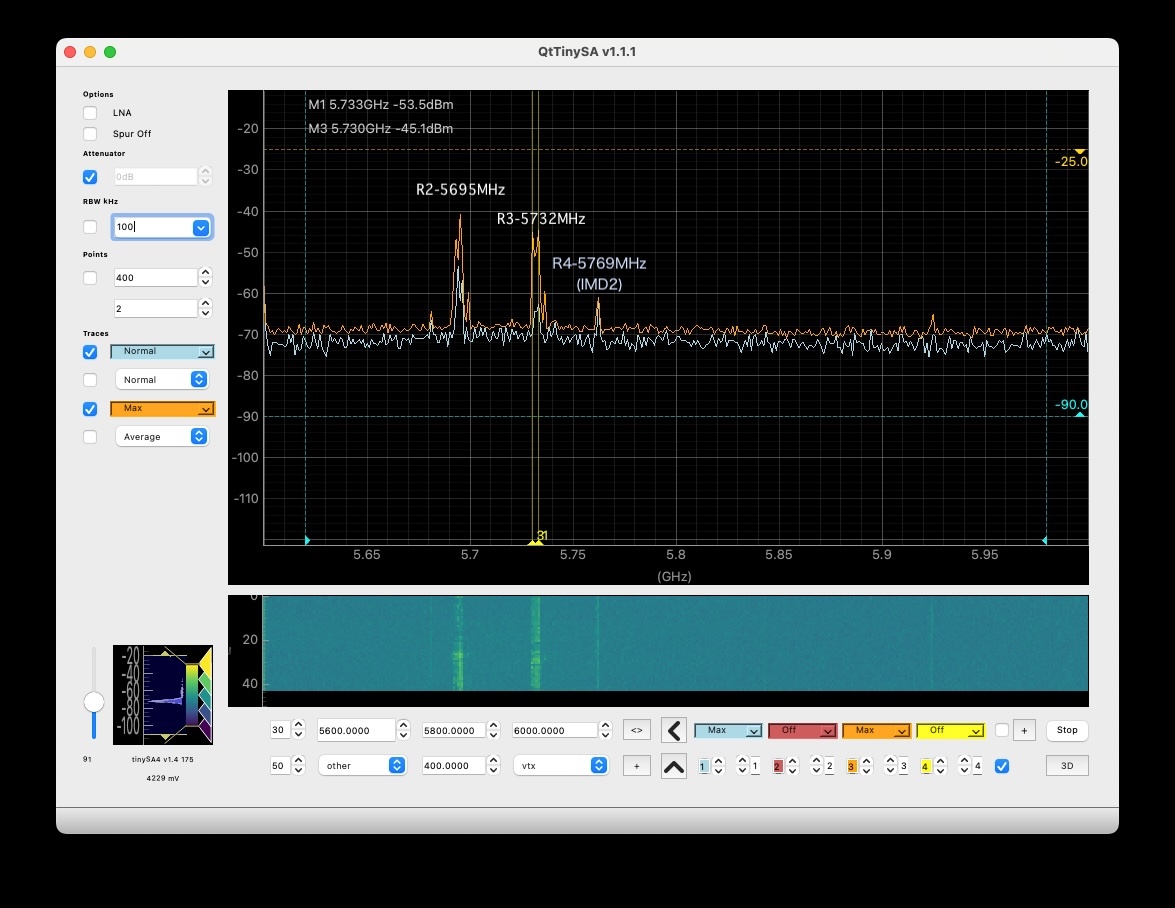
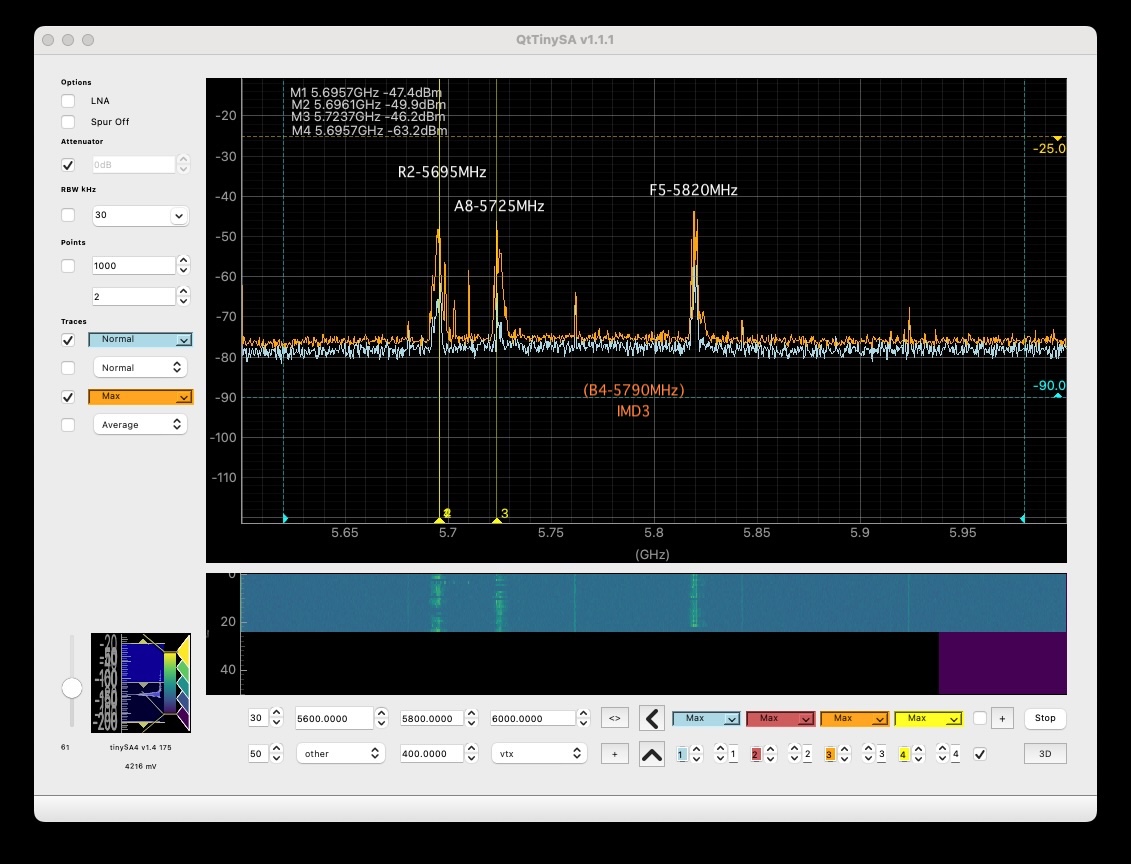
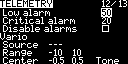
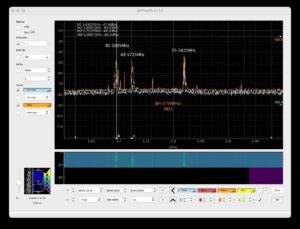
二次IMD: 2波を送信すると、それらが干渉して発生した歪みが別のチャンネルに現れる様子がはっきりと観測できました。
Screenshot
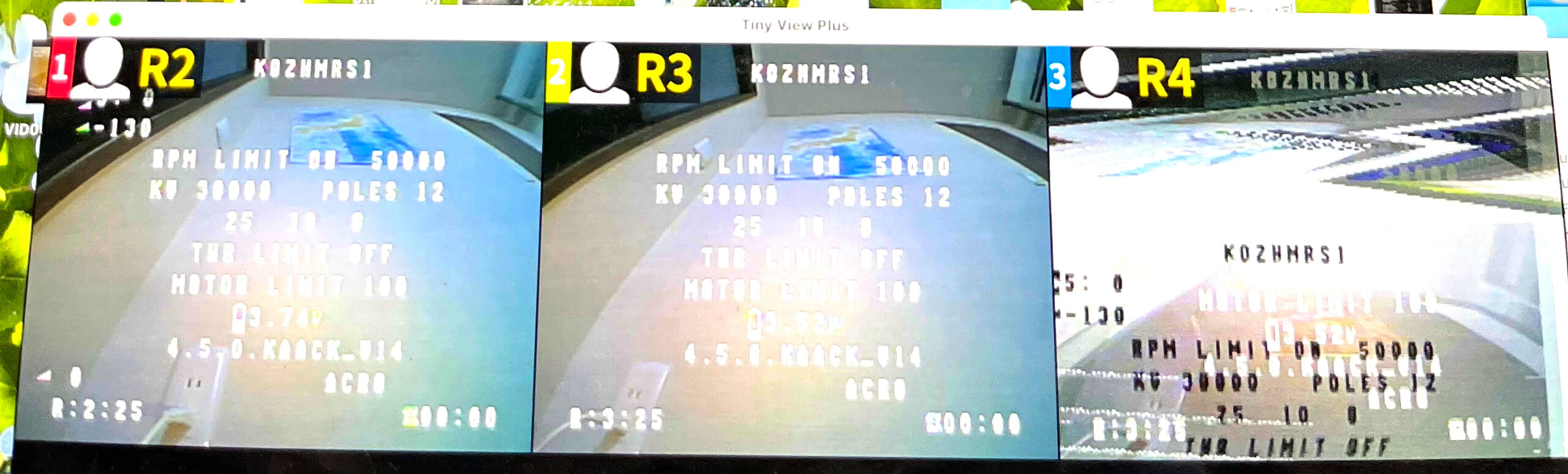
VTXよりR2-5695MHzとR3-5732MHzの電波を発出し、R4-5769MHzに相互変調歪による信号が現れた様子が見られた。
R4の受信機にもR2とR3の画像が観測された。

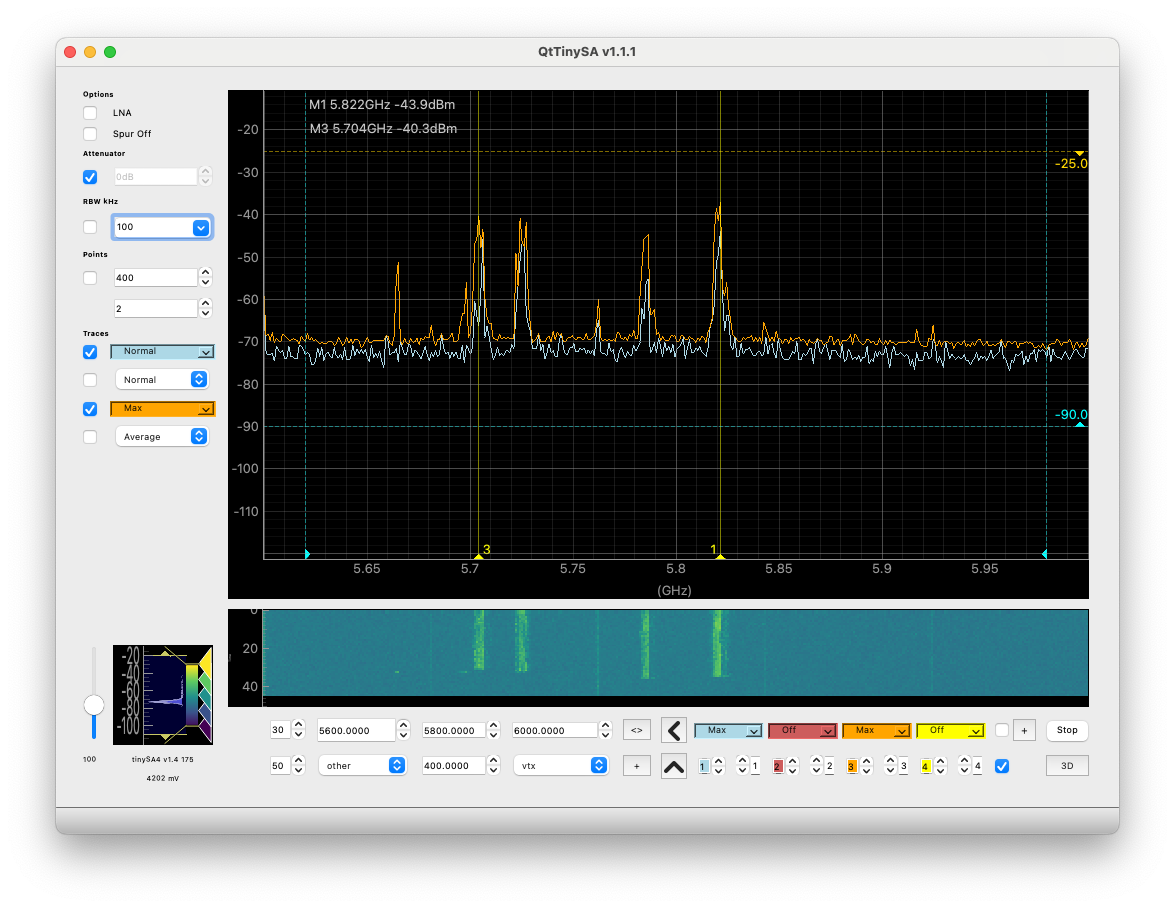
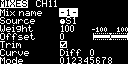
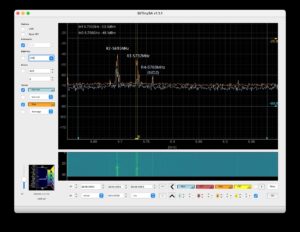
三次IMD: 問題となった3波(R2-5695MHz, A8-5725MHz, F5-5820MHz)を送信しても、受信機側(B4-5790MHz)では影響が見られるものの、スペクトラムアナライザー上では明確な変化を捉えることはできませんでした。
Screenshot

この結果から、三次IMDは二次IMDに比べて信号が極めて微弱であることが改めて裏付けられました。同時に、安価な機材で4波同時飛行の評価を網羅的に行うことの難しさも分かりました。
まとめと今後の展望
今回の分析とテストにより、三次IMDを考慮した新しい評価軸で、有望な4波の周波数組み合わせを見つけることができました。
しかし、この組み合わせが本当に「最適」かどうかを判断するには、より多くの環境、多くのパイロットによるテストが必要です。この記事が、ドローンレースコミュニティにおけるさらなる議論や、新しいアイデアの創出に繋がることを期待しています。
皆さんのテスト結果や、別の角度からのアプローチなども、ぜひ共有していただけると幸いです。