じっと静観していたtoothpickブームですがついに手を出してしまいました。色々な機種がありますが、手に入れやすいこともあり定番とも言えるHappymodel SAILFLY Xにしました。

まだまともに飛ばせていません。そういうことも含めての感想などを書いておきます。
[ 受信機とブザーの組み込み ]
受信機無しのバージョンを入手したのでFrsky XM+を取り付けました。FCには受信機用にコネクターが接続されています。そのリード線をカットしてXM+を半田付けしました。ついでにブザーも取り付けました。キャノピーの内側には受信機とブザーを入れるスペースが十分にあります。

[ Betaflightの更新 ]
Betaflightのバージョンが例によって4.0の開発版(4.0.0 Dec 11 2018 / 01:09:33)でした。わざわざこのバージョンを使用している理由があるのかも知れません。またモードとアームはAUX1, AUX2に割り当てられているので最低限の設定で飛ばせるのですが、ここは敢えて最新版のBetaflight 4.0.4にしてみました。
更新の前にCLIでdumpとdiff allを保管することに加えて、比較しやすいのでPower&Battery, PID Rates, Filterなどの画面はスクリーンショットも保管しておきます。
Betaflight 4.0.4を導入後、先に保管したDiff Allデータを入れますが元がRCにもなっていない開発版なのでエラーがいくつかでます。本来なら全て手作業で設定するべきかも知れませんが、この状態をもとに設定しました。
- ボードの反転が反映されませんでした。
どうも開発版と正式版で設定項目が変わっているようです。ConfigにてボードをRoll方向に180度回転させる設定をしました。正しく設定されたかどうかはSetup画面で機体の傾きが正しく反映されることで確認します。
set align_board_roll = 180 - Power&Batteryで電圧関連が0になっているので、適当に設定します
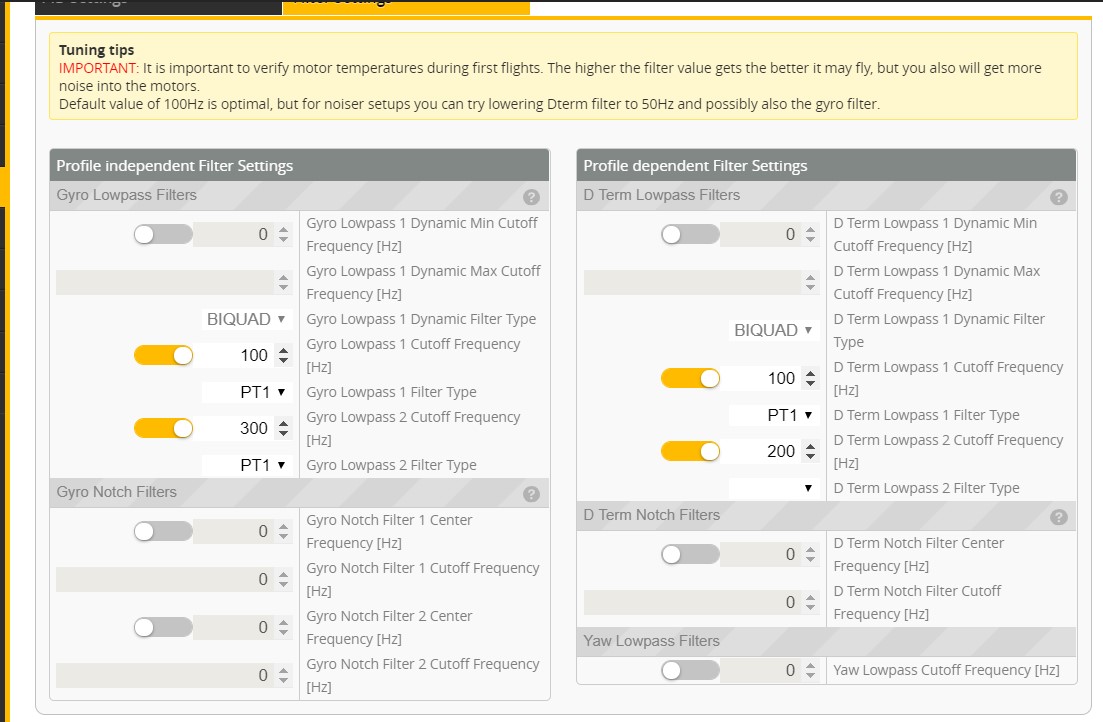
- PID Tuningのフィルター設定が変わっています。そのままで良いのかも知れませんが、元の値にしておきました。

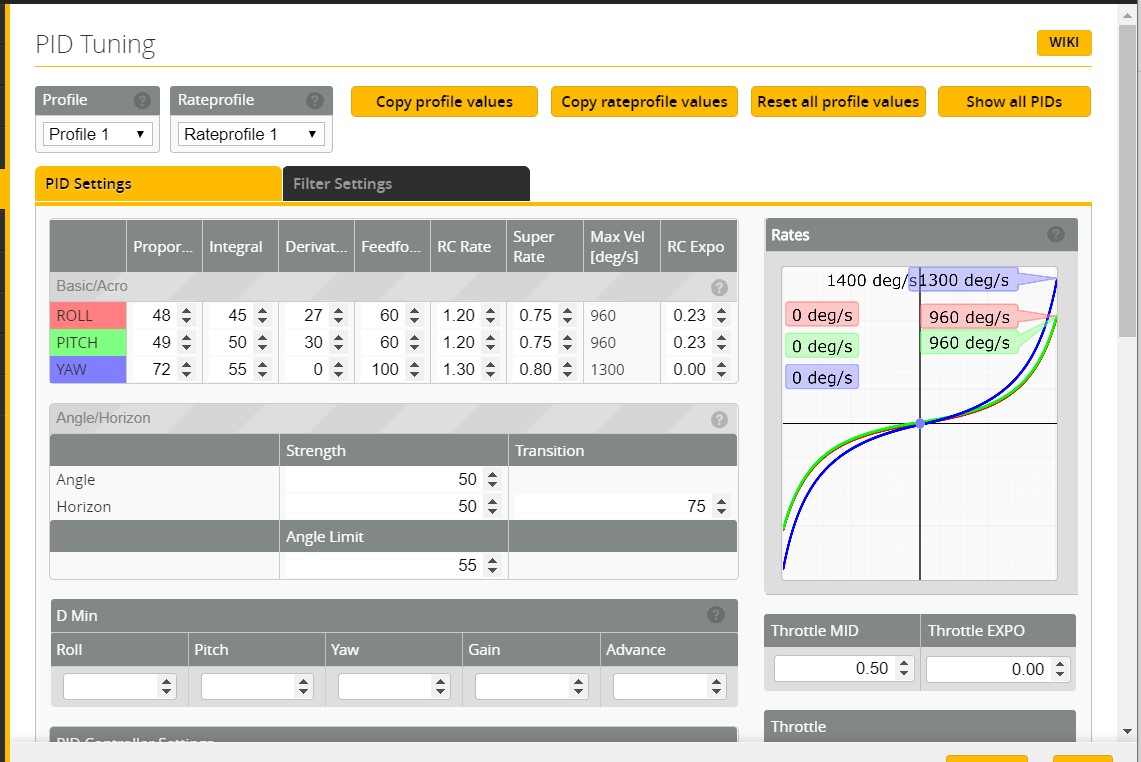
[ RATES ]
レートはかなり過激な設定がなされています。PITCH/ROLLは960 deg/s、YAWは1300 deg/sです。実際に飛ばしてみると小気味よく飛ばすにはこれくらいの方が良いかも知れません。自分の好みのレートと二種類設定して試しているところです。わたしてきにはRC Expoを沢山入れた方が飛ばしやすいです。
[ カメラアングル ]
おそらく30度ほどで固定されています。小型機は20度から25度くらいで飛ばしているので30度だと低速低空飛行がかなりしんどいです。
そんなおっかなびっくりな飛行をインスタグラムで公開しています。
とりあえず2Sでも十分なパワーと運動性能があることは良くわかりました。その後3Sに変更してパンチ力のテスト中にプロペラがひとつ飛んでしまいデスロールに入りました。そのクラッシュのショックでVTXの電波が出なくなったためひとまずテスト終了です。もともと考えていたVTXの換装にせざるを得ない状態です。
no comment untill now