部長のところからやってきたLiteVNA 64を押入れの奥から引っ張り出してきました。コンパクトな機器ですが6GHzまで対応している多機能なネットワークアナライザーです。私がこれを持っている理由はただ一つでSWRの計測です。
SWRは日本語では定在波比と言います。日本語になっても全く意味が想像出来ませんね。ざっくり言うと、電波を発射しようとアンテナに電力を送り出した時に、少しだけ電力が逆流してきます(透明なガラスに光を当てると少しだけ反射するかのようなイメージ)。それを数値化したものがSWRです。
理想的な数値は1.0でアンテナに送った電力が全てアンテナで消費されることを示します(SWRでは電波になったのかどうかは分からないです。もしかするとアンテナの近くで熱になっているのかもしれない)。一般的に言えば1.5以下なら合格。2.0以下ならまあまあ大丈夫と言う感じです。もし2.0だと11.1%の電力が戻ってきています。戻ってきた電力はVTXの中で熱に変わると思われます。あまりにSWRが大きいと最悪な場合ではVTXを壊すこともあるかもしれません。と言うことでSWRは小さい方が望ましいです。
[ LiteVNAの設定 ]
概ねOscar Liangさんの「How to Measure Antenna SWR with LiteVNA: A Comprehensive Guide」に従いました。キャリブレーションに関しては「Tinyネットアナ入門 LiteVNA 64のキャリブレーション」も参考になります。細かい操作方法は公式のドキュメントを読みました。
[ 測定してみた ]

手持ちの5.8GHzアンテナでSMAコネクターの付いたものを測定してみました。優秀なものから順に紹介します。
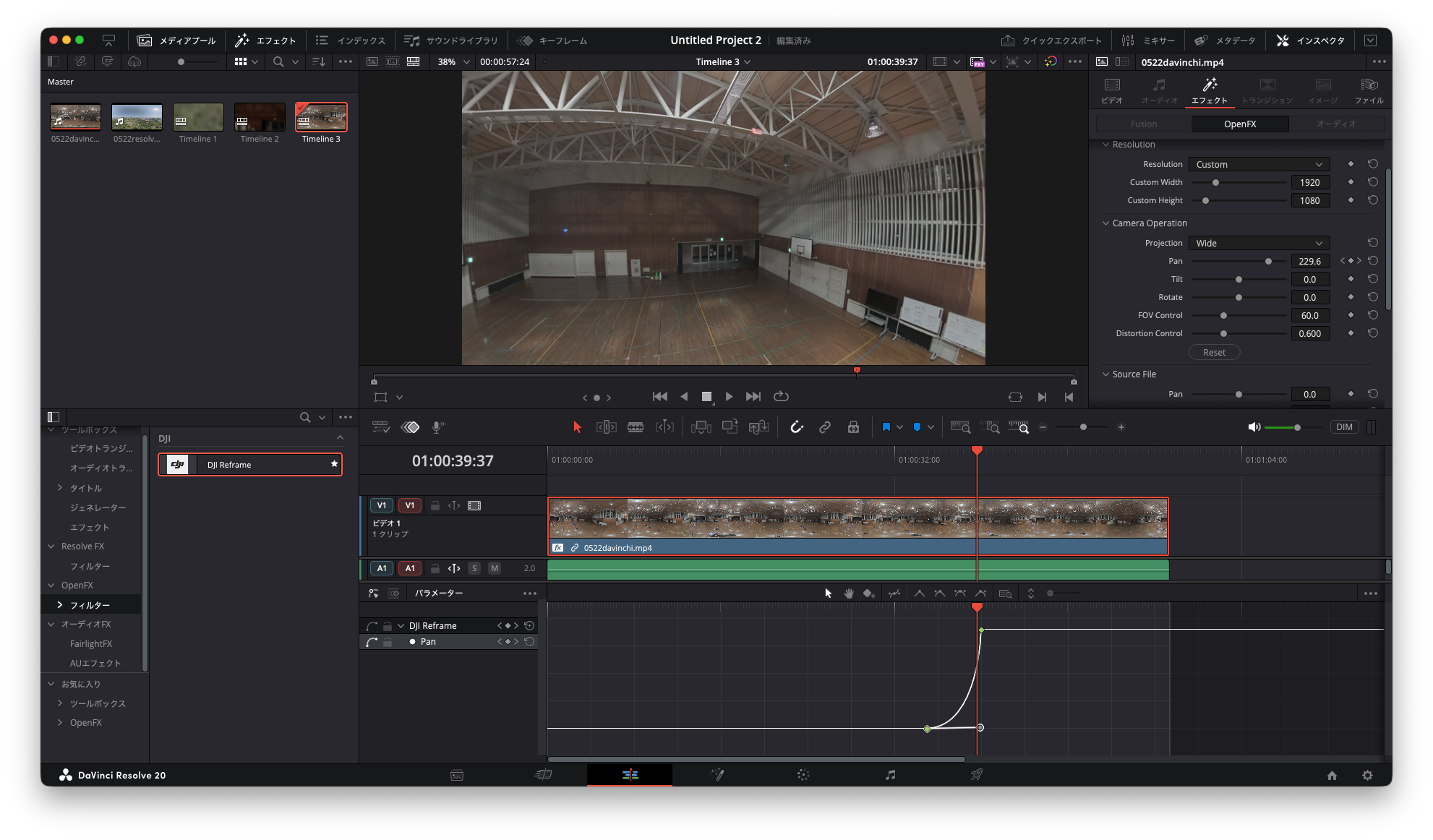
古いTBS(Team-BalckSheep)のStubです。かなり優秀です。どのアンテナにも言えますが個体によって少し違いますが、平均的なSWR値は変わりません。

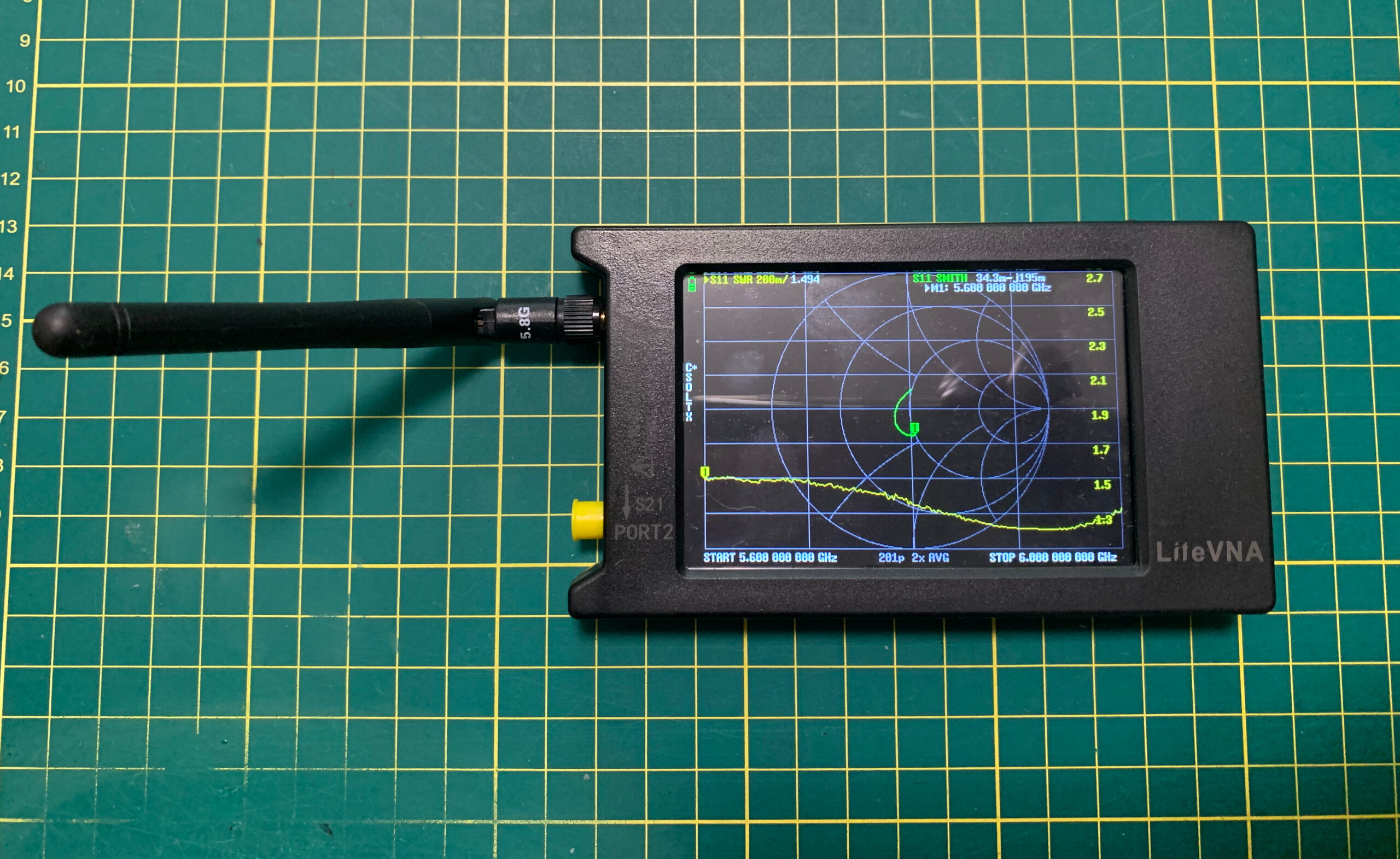
黄色の線がSWR値のグラフです。横軸が周波数で5.6GHzから6GHzになっています。縦軸がSWRで右側にSWRの数値が表示されています。緑色の線はインピーダンスを表す何か(^^)です。
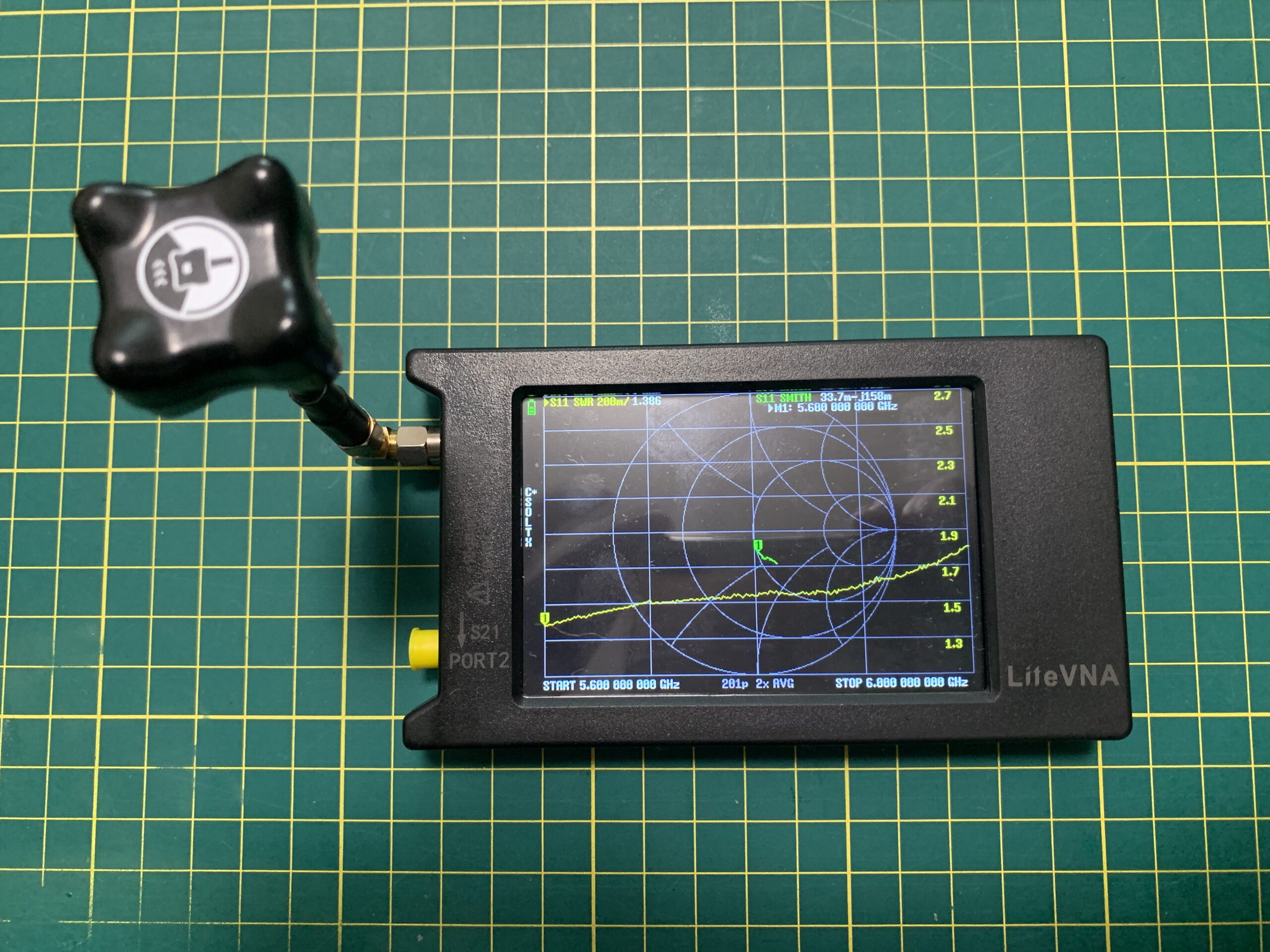
TBS Triumph、TBS流石としか言いようがない。

TBS TriumphにL字型のコネクターを追加したもの。少し特性が悪くなりますが問題はないレベル。L字型コネクターも他のものと交換して試すべきだったかもしれないです。
EMAX Pagoda-2のとても古いもの。クラッシュしてボロボロだけど数値は良い。
EMAX Pagoda-3Bもまあまあ悪くない。特に日本で使用される周波数では1.5以下になっている。
ところが同じEMAX Pagoda-3Bでも使い古してコネクターが変色している(それが原因か元々の個体差かは不明だけど)はやや悪い。
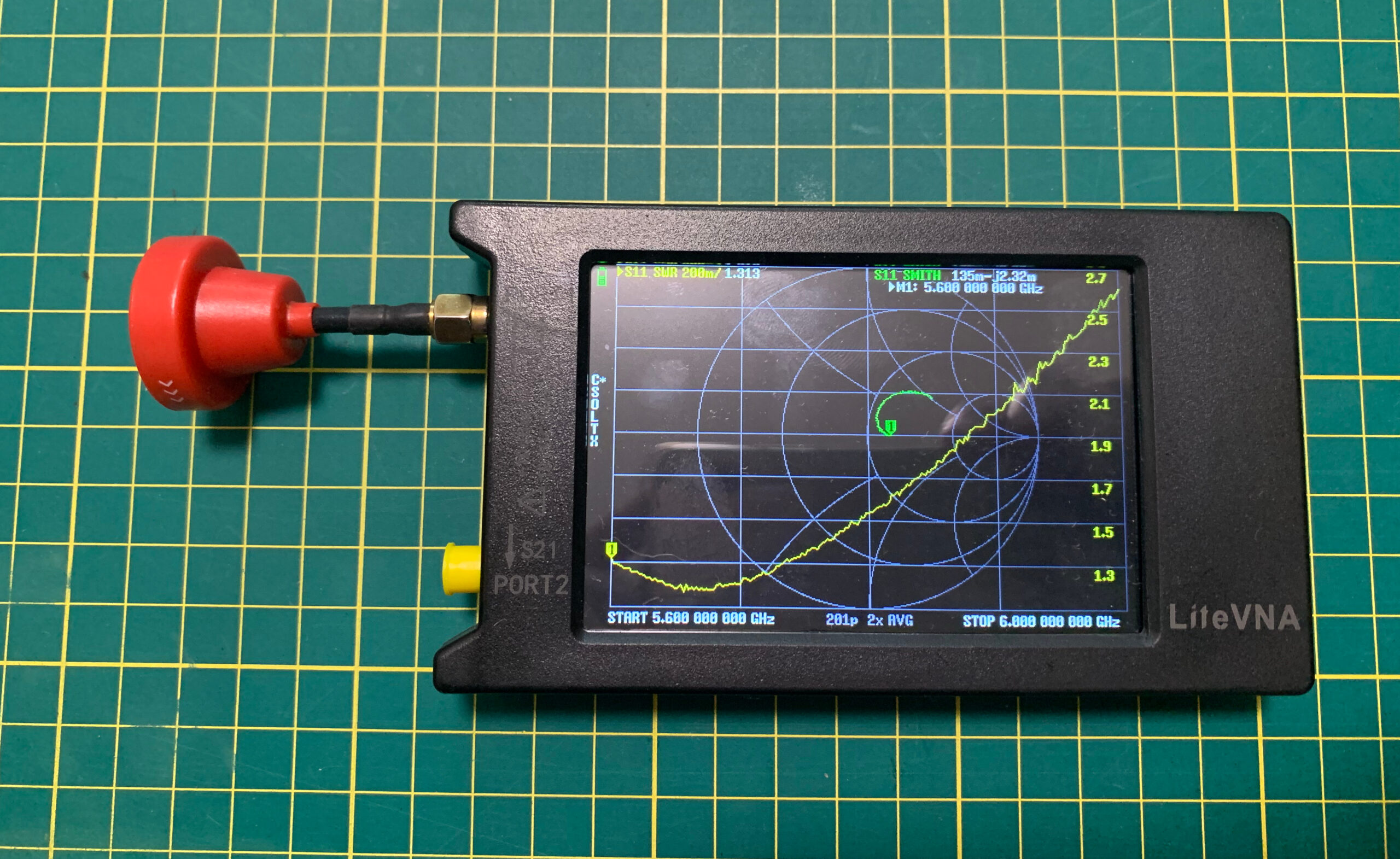
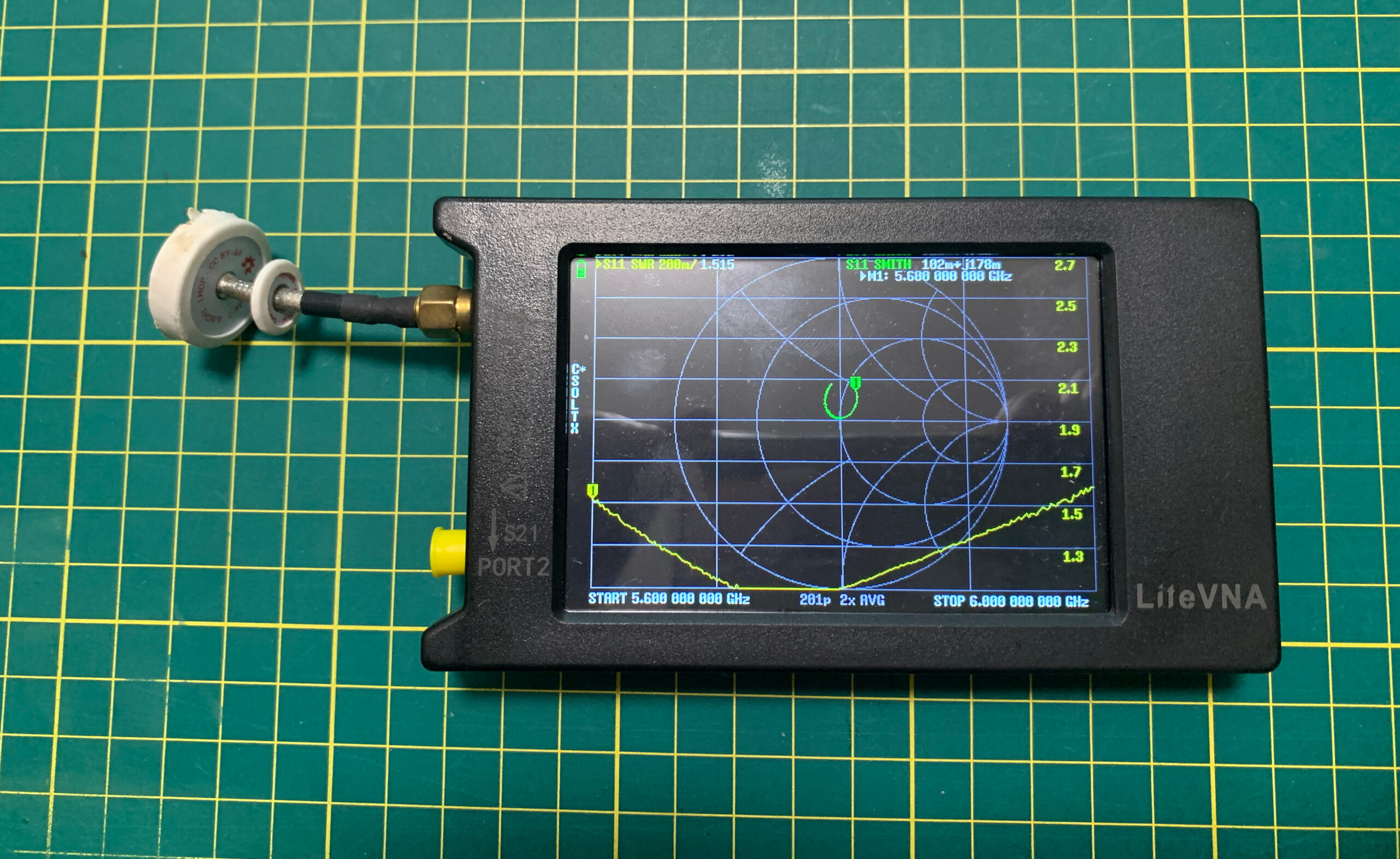
ImmersionRCのパッチアンテナ。定評がある人気のパッチ、さすがに良い感じです。硬くて外せなかったのでL字コネクターを付けた状態での測定です。
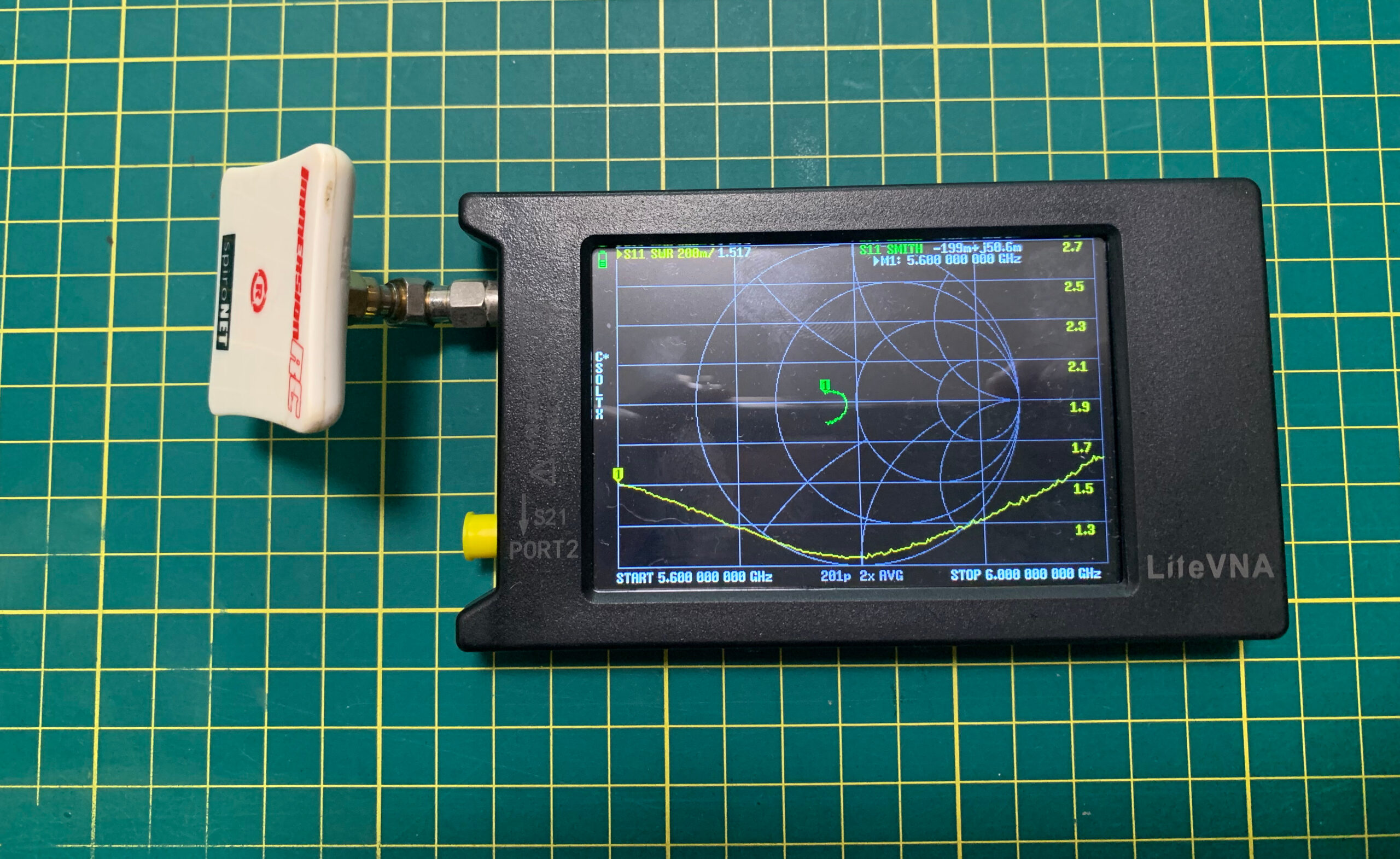
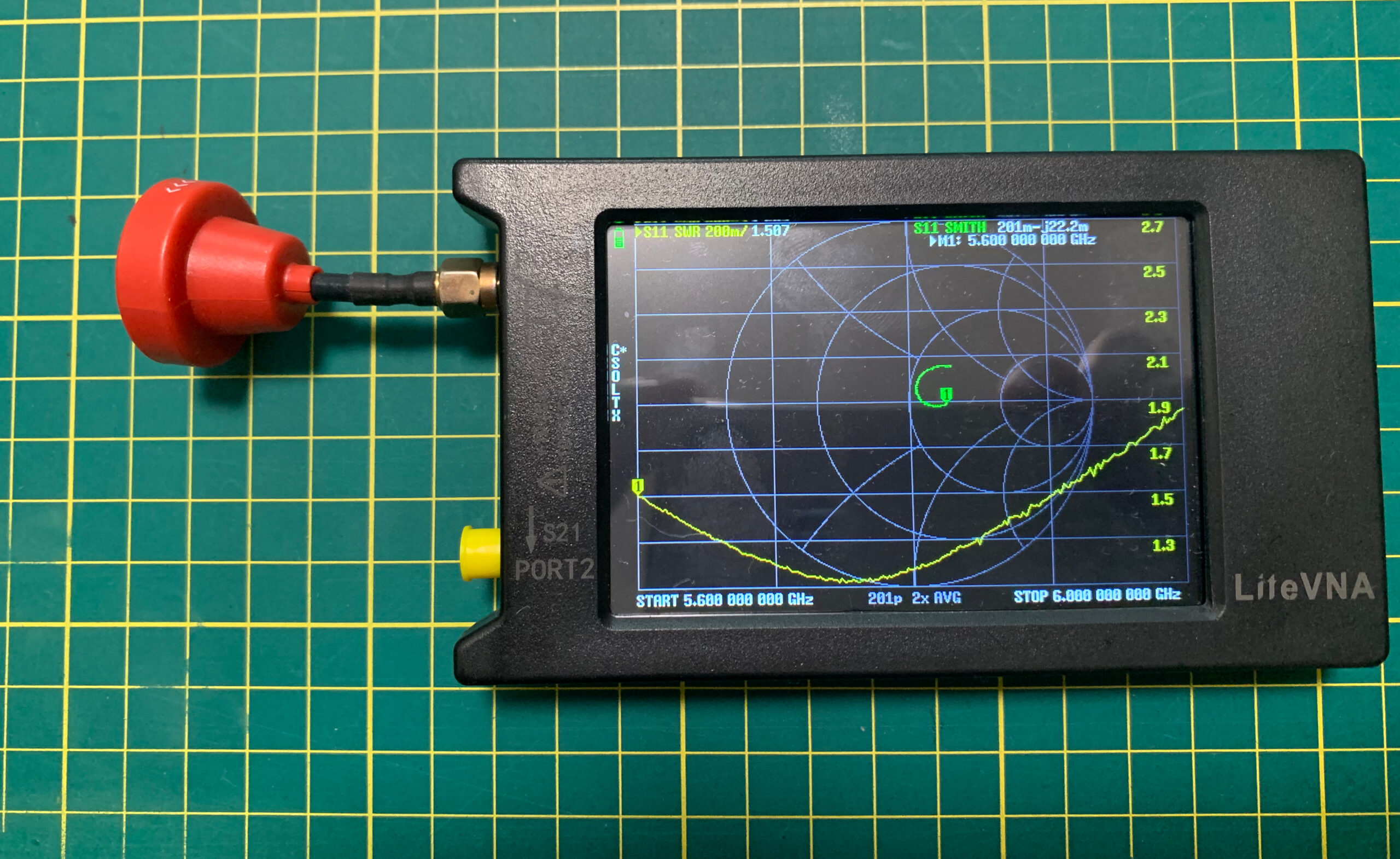
FOXEER ORERO、優秀です。これも斜めにするコネクターを付けた状態です。確かSAITOさんがWorld Games 2022へ参加するときのクラウドファンディングに協力した時の返礼品で、全くの未使用。

優秀な謎アンテナ。どこから来たものか不明。
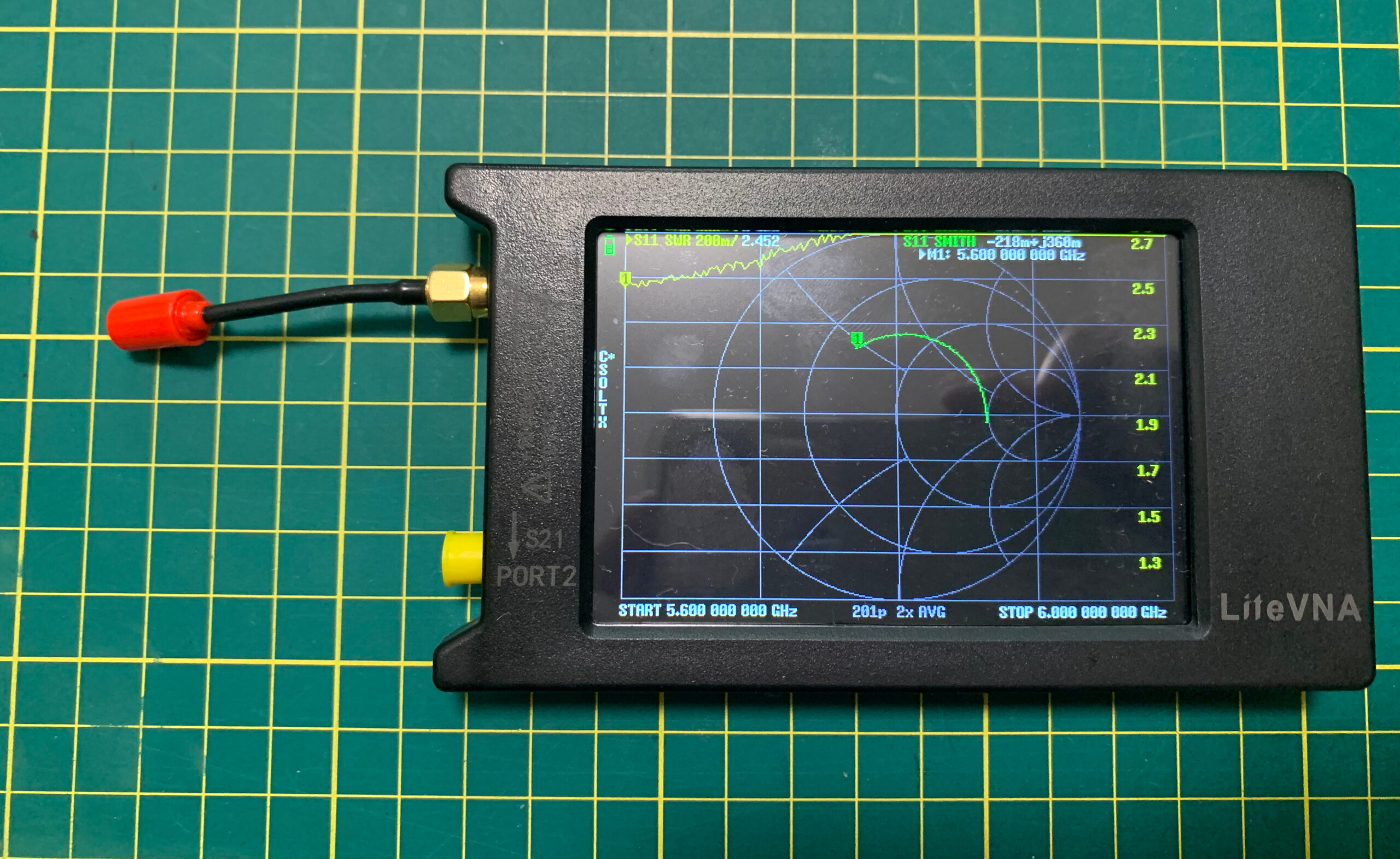
ここからは即ゴミ箱行きシリーズ
EMAX Nano、これは小さいのが魅力で購入したもののあまりに電波が悪くてすぐに使わなくなったものです。完全に数値に表れていますね。
RUSH Cherry、期待を裏切られた感大きい。とても綺麗な作りで値段もそこそこ高かった気がする。長さ違いで2本ありますが、どちらも同じくらいの成績。