空飛ぶ360度カメラ、DJI Avata 360、とりあえず良さそうなところをゆったり飛ばして後からどこを見せるかを考えれば良いというシチュエーションによっては最強のツールです。
そのため従来の編集作業に加えてグルグル回すという作業が必要になります。そのためのツールとしてDJI Studioという動画編集アプリケーションとAdobe Premiere用のプラグインがありました。それに加えて待望のDaVinci Resolve用のプラグインDJI Reframeもついに提供されました。pkgファイルをダウンロードして導入すれば準備完了です。
最初にDJI StudioとDJI Reframeプラグイの違いについて書いておきます。
DJI Studioではあらかじめプログラムされた動きが用意されているので、簡単にグリグリ出来ます。また、目標を設定して追従させるインテリジェントトラッキングという機能はDJI Studioにしかありません。自分で細かく動きを決めるキーフレームという機能もあります。普通に軽く編集するだけならDJI Studioで十分です。
Premiereは持っていないので分かりませんがDaVinci ResolveのDJI Reframeで行えることはDJI Studioのキーフレームの機能だけです。キーフレーム間の変化量はDaVinci Resolveの方が自由度が高いです。なんと言っても、その他の多彩な動画編集機能と同時に使えることが最大の強みです。
簡単に手順を紹介します。
[ DJI StudioでDaVinci Resolve向けにExportする ]
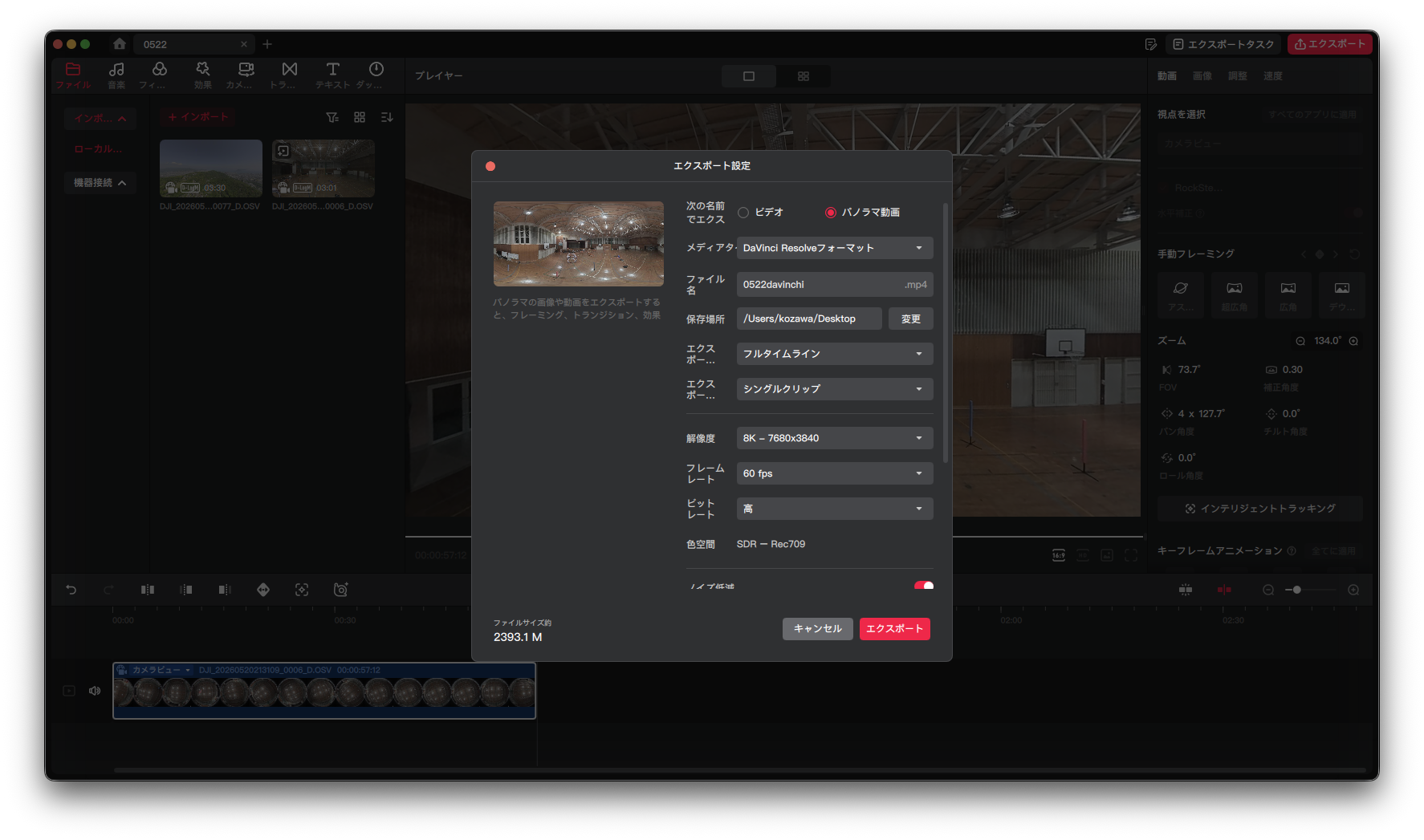
DJI Studioに元の動画ファイルを読み込んでタイムラインを作成し「エクスポート/パノラマ動画/DaVinci Resolveフォーマット」を実行します。かなり時間がかかるので予め必要な部分だけに編集しておくのが良いと思います。
[ DaVinci Resolveに動画を読み込む ]
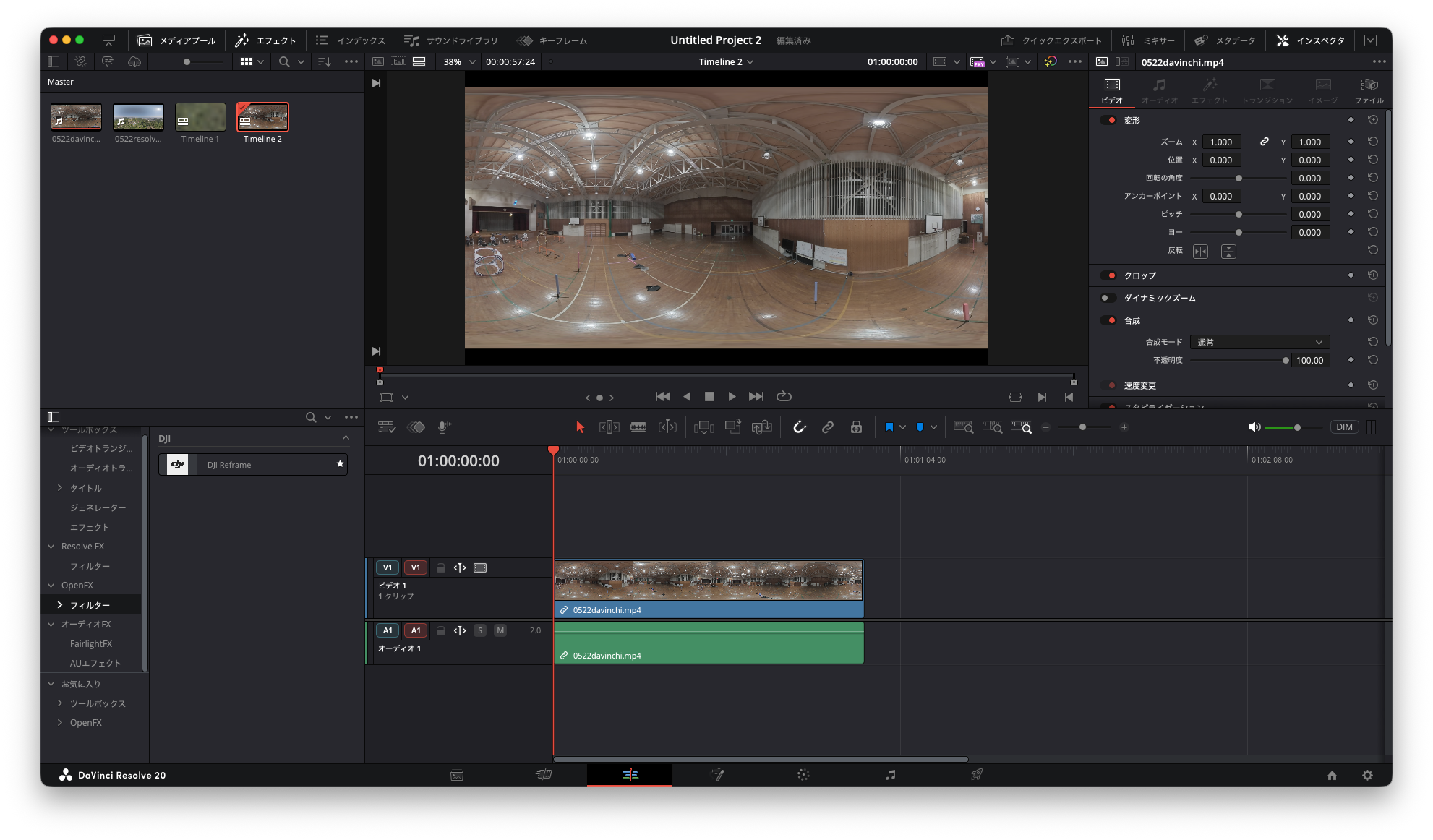
動画を読み込みタイムラインを作成したところです。360度全てが映り込んだ画面が表示されます。
[ DJI Reframeを適用する ]
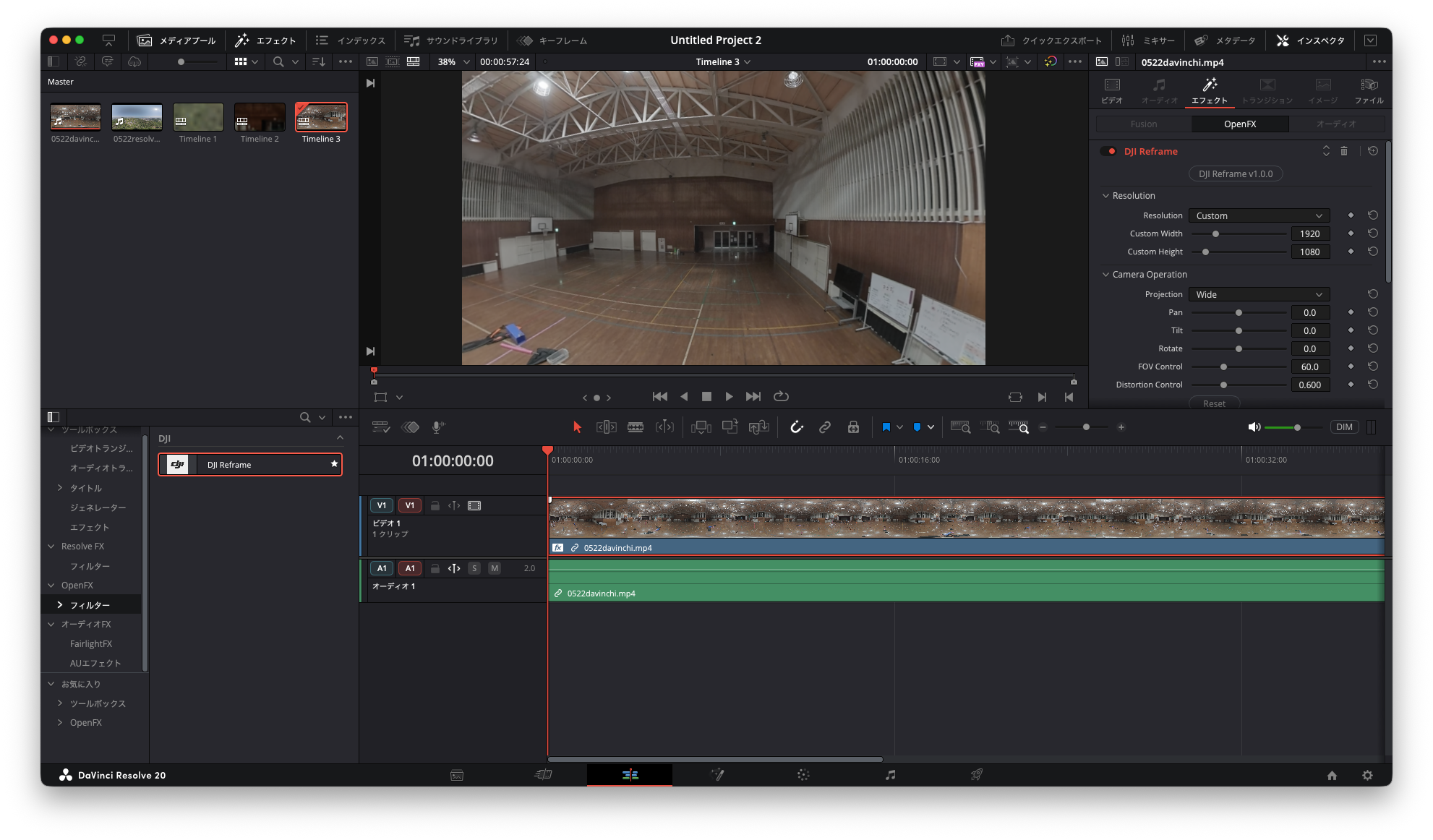
「エフェクト/OpenFX/フィルター」にDJI Reframeがあります。それをタイムラインにドラッグ・ドロップします。するとプレビュー画面が変わります。
[ パラメーターを表示する ]
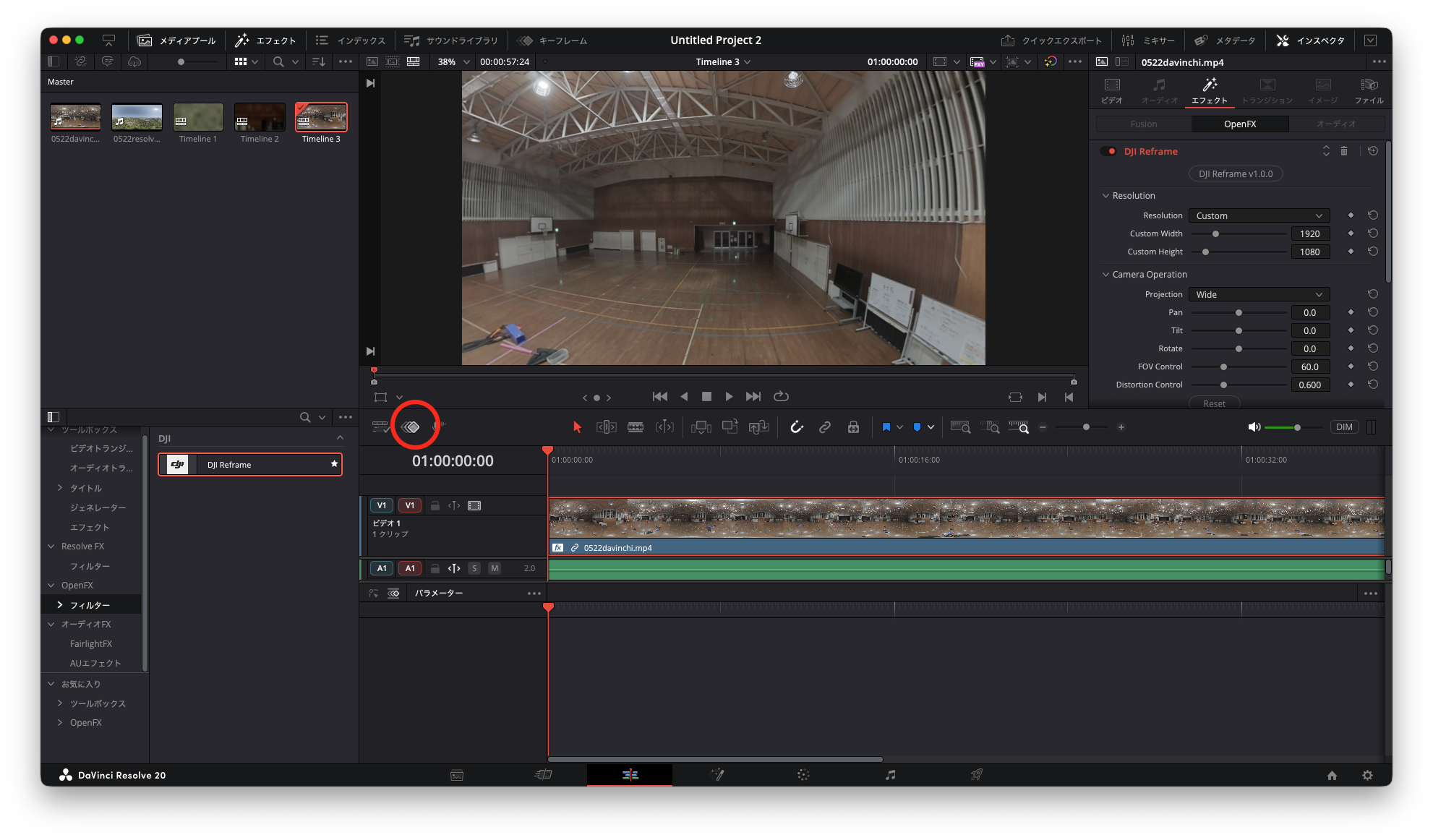
赤丸で囲った四角のアイコンをクリックしてパラメーターを表示します。これは表示しなくても編集作業は出来ますが、出しておいた方が格段にわかりやすくなります。
[ 横回転させてみる ]
360度の編集を横回転を例として紹介します。目標はタイムラインの35秒から左にパンを始めて40秒で360度回転して終了するというものです。
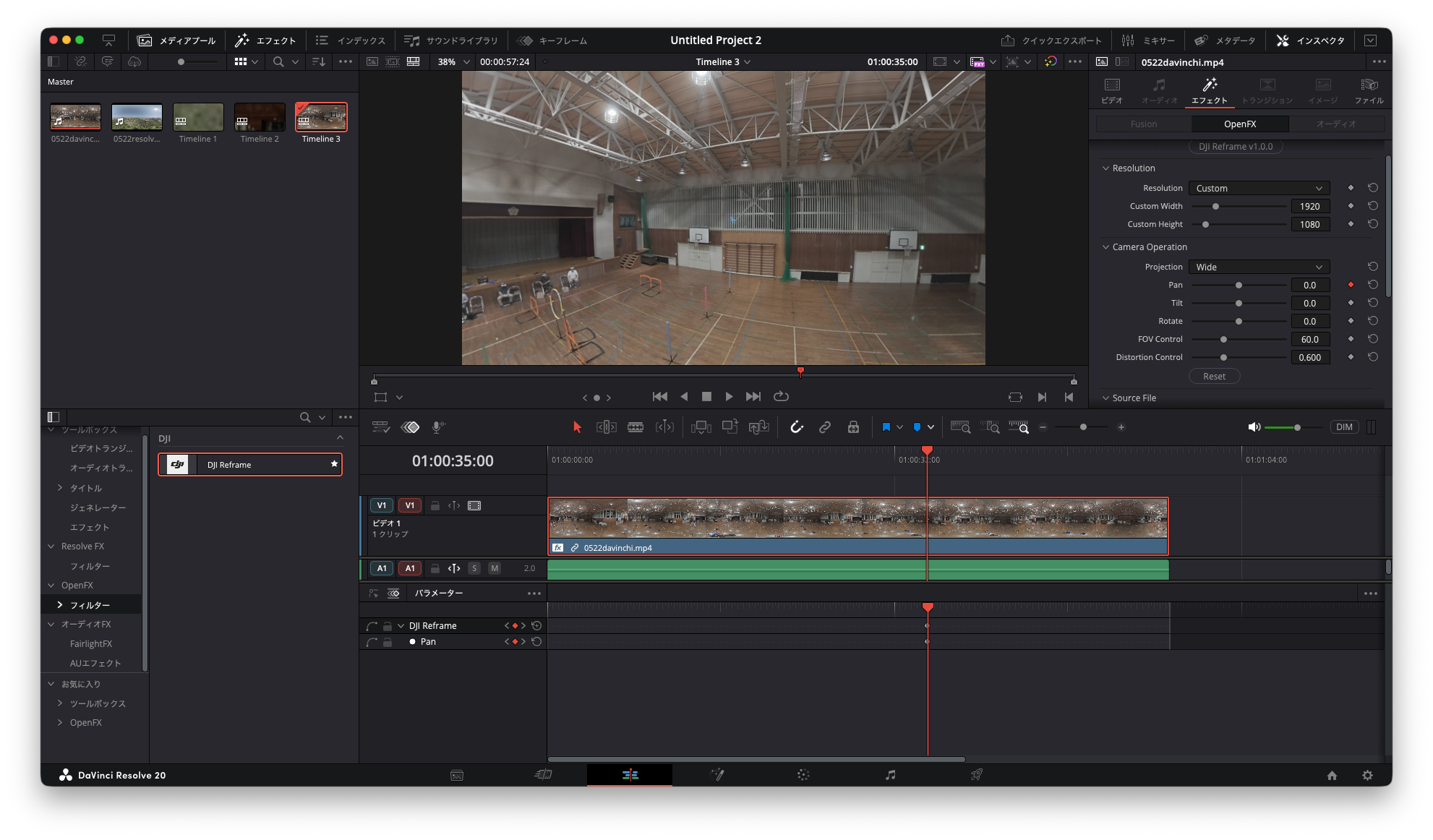
まずインスペクタでエフェクト/OpenFXを出しておきます。タイムラインの現在位置を35秒のところにしてインスペクタのPanの右の方にある小さな菱形をクリックします。すると菱形が赤くなりキーフレームが記録されます。これを起点とします。
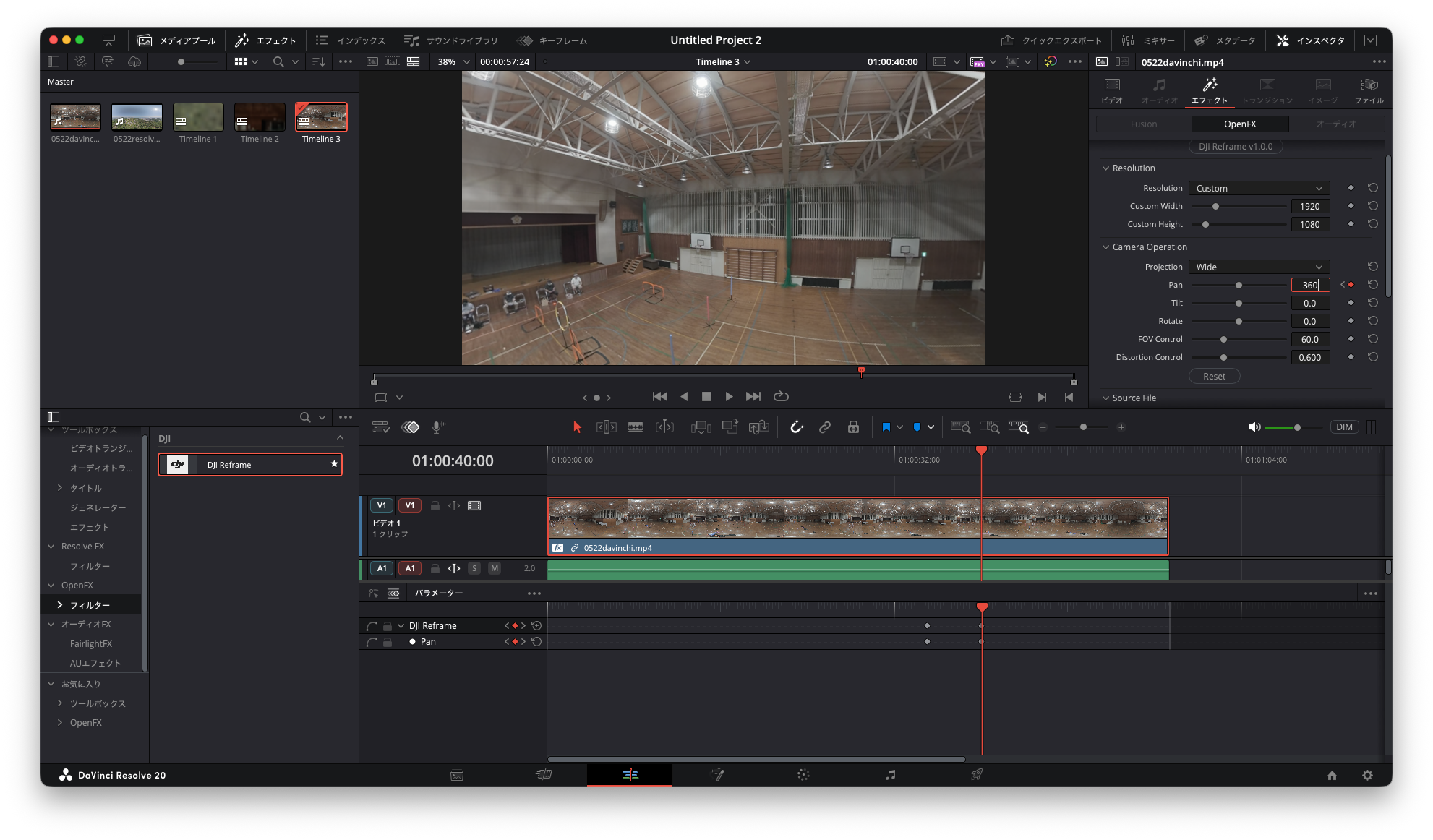
40秒のところに移動して先ほどと同様にPanの小さな菱形をクリックし、ここを終点とします。そしてPanの数値を360とします。タイムラインのパラメーターを見るとどこにキーフレームを打ったが明確に分かります。
これで回転動作が出来ました。タイムラインを再生させて確認します。
この要領でTiltやRotate, FOVなどを組み合わせていきます。
このままだと二つのキーフレームの間の数値の変化は一定速度です。これを例えば最初はゆっくりでだんだん加速するみたいなこともできます。
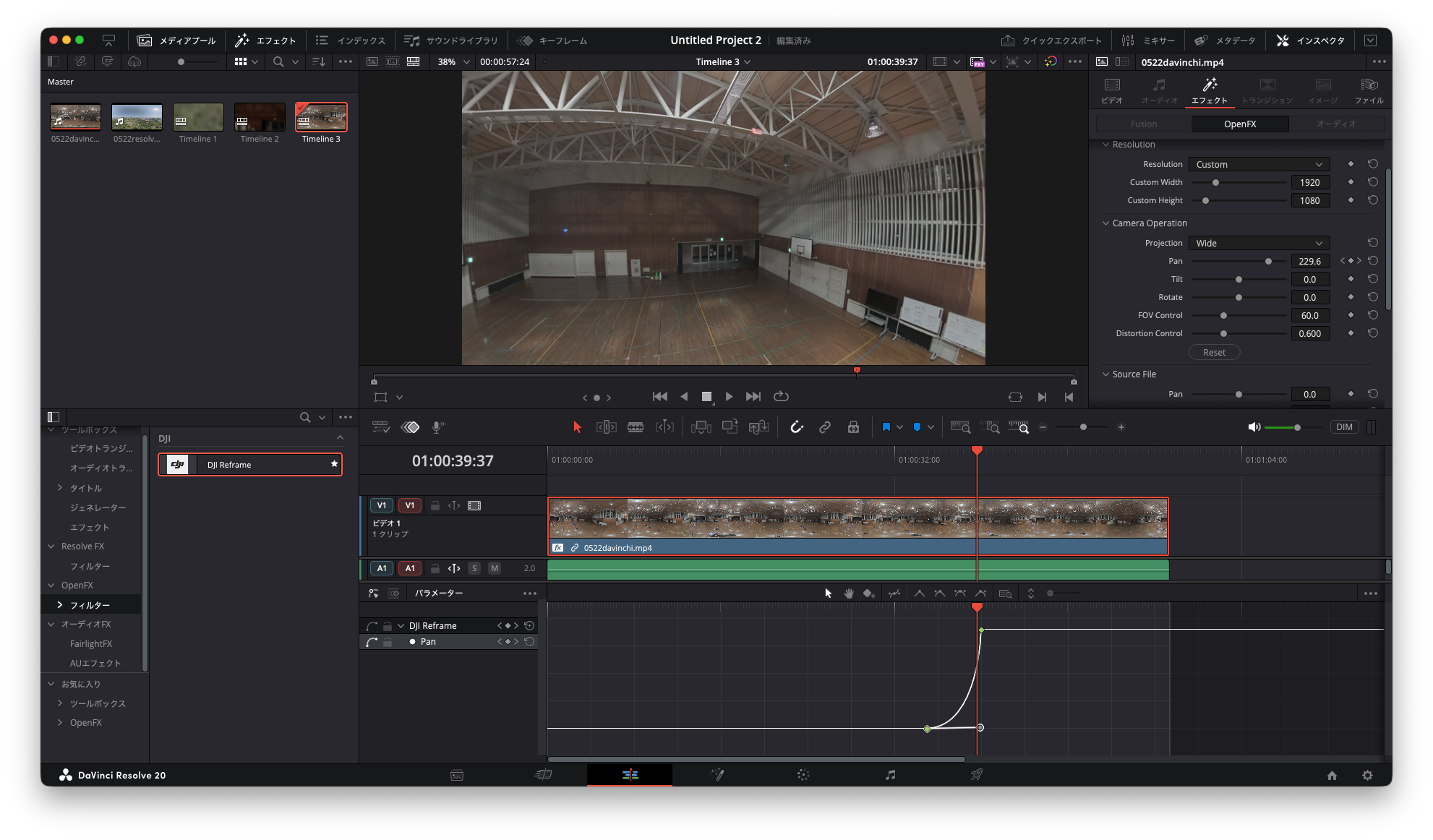
パラメーターの左横のカーブしたアイコンとPanの左端のカーブアイコンをクリックした状態です。これで表示されるグラフを変更すると数値変化の具合を調整できます。
最後に複数の動作を組み合わせた例を紹介しておきます。
キーフレームに慣れた人なら、これだけで何をしているか分かる編集画面の様子 pic.twitter.com/Al8zRkogyA
— コザック KozakFPV 無限の空へ (@nkozawa) May 23, 2026