Parrot Bebopの飛行データをビデオクリップに合成する方法を教えてもらいました。日本語と英語でまとめてみます。あくまでも私の環境に基づいた方法です。
I am going to explain my method to overlay Bebop’s flight data onto video file. This is the procedure for my equipments. There are some other variations to do this.
[ New Tool! ] (2015/04/05 update)
PUDファイルをGPXに変換する新しいツールが公表されました。We have new PUD to GPX converter tool.
Parrot Bebopの新しいフライトデータ変換ツール #BebopDrone New PUD converter tool
[ 参考サイト / Reference web site ]
PUDファイルをGPXファイルに変換する/Convert PUD file to GPXファイル
Geek Mag – Garmin Virb Edit: un logiciel de montage vidéo gratuit
BePadExp 変換プログラム/PUD converter
Garmin VIRB Editの紹介/Introduction to Garmin VIRB Edit
Geek Mag – Garmin Virb Edit: un logiciel de montage vidéo gratuit
[ 概要 / Overview ]
- BebopはParrot Drone Academyに送信するためのフライトデータ(PUDファイル)を記録しています。
- それを取り出してGPXというファイル形式に変更します。
- Garmin VIRB Editというアプリケーションで動画とGPXファイルのデータを重ね合わせます。
- Bebop records flight log file (PUD file) for Parrot Drone Academy.
- We can pull it out from Bebop and convert it to GPX file.
- Using Garmin VIRB Edit application to overlay GPX file data onto video file.
[ フライトログの取り出し – Pull out flight log data ]
フライトログファイルは拡張子pudが付いたファイルでBebop本体で記録され、FreeFlight3アプリケーションを経てParrotのDroneAcademyのサーバーにアップロードされます。アップロードされるとBebop本体とFreeFlight3からpudファイルは消されてしまいます。消される前にBebop本体からファイルを取り出す必要があります。FreeFlight3からのファイルの取り出しはroot化されたAndroid端末以外では不可能です。
Flight log file, extension .pud, is recorded by the Bebop and transmit to Parrot Drone Academy server via FreeFlight3 application. PUD file will be deleted from the Bebop and FreeFlight3 after uploading. We need to steal PUD file from the Bebop before the Bebop deletes it. We can not pul out PUD file from FreeFlight3 except rooted Android terminals.
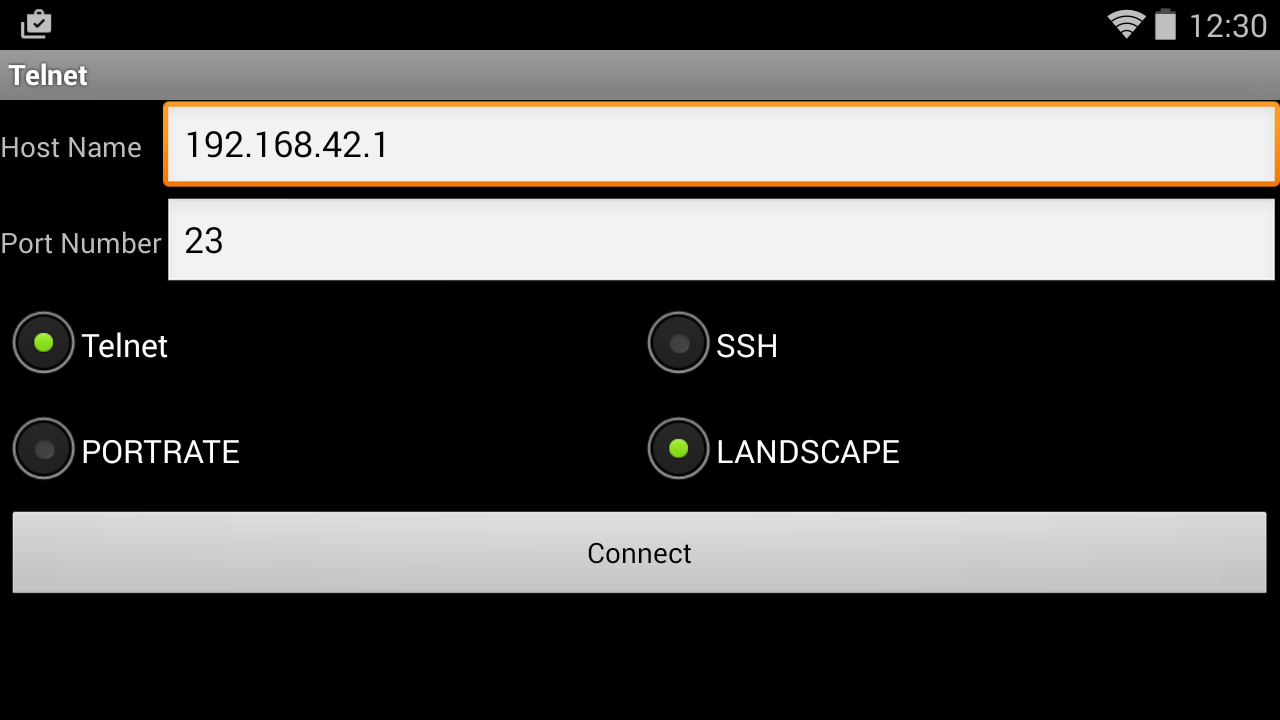
BebopからのPUDファイルの取り出しにはFTPを使います。FTPの情報は以下の通りです。
We can use FTP to get PUD files from the Bebop. The FTP information is as follows.
- IP Address: 192.168.42.1
- User: Anonymous (no password)
- PUD file location: /internal_000/Bebop_Drone/academy/*
PCからBebopに接続してFTPクライアントを使いPUDファイルを取り出すことも出来ます。PUDファイルが消されるタイミングが良くわかっていないので、フライトの終了毎にAndroid端末からFTPを行いPUDファイルをコピーすることにしました。FolderSync Liteを使用しすると便利です。
蛇足ですがAndroid端末からMac OS XへのファイルコピーはAndroid File Transferが便利です。注) 私の環境の問題かも知れませんがFolderSyncで転送されたファイルがAndroid File Transferで見えなかったりします。その場合、Android上でrenameを行うと見えるようになります。
We can connect WiFi from PC to the Bebop and FTP get for PUD files. However we do not know when PUD files are erased on the Bebop. Therefore I decided to copy PUD files from the Bebop to Android device at the end of each flight. I am using Android application FolderSync Lite to do this.
This is just for your information. I use Mac OS X application Android File Transfer to copy files from Android device to Mac OS X. Note) Sometimes, I can not see files copied by Folder Sync on Android File Transfer. Renaming file names on Android, then file names become visible on Android File Transfer.
[ PUDファイルからGPXファイルへの変換 – Convert PUD file to GPX file ]
PUDフィルは拡張子が.pudもしくは.pud.tempです。最後にtempが付いているファイルはBebopがまだ記録中のファイルですが、それでも構いません。
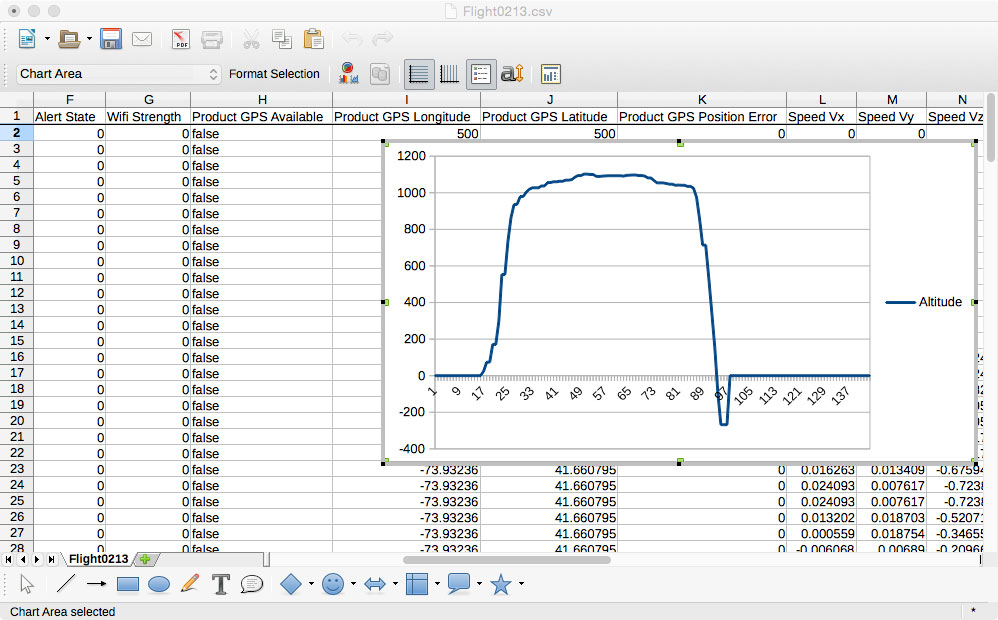
変換にはBePadExpというWindowsアプリケーションを使用します。私はMac OS Xを使用していますが、これだけは仕方が無いのでParallels下のWindows 10 Technical Previewを使用してBePadExpを走らせています。使用法歩は極めて簡単です。PUDファイル(.pud.tempは.pudにリネームしておきます)を選択しExport GPXにチェックをした後、Exportボタンを押すだけです。
PUD files have extension .pud or .pud.temp. PUD file which has .temp means the Bebop was still recording on this file, but it does not matter. We can use .pud.temp files also.
I use BePadExp Windows application to convert PUD files to GPX files. I am using Mac OS X, so no way, I run BePadExp on Windows 10 Technical Preview under Parallels. This is very easy to use. Just select PUD file (.pud.temp file needs to be renamed to .pud) and put check mark on Export GPX, then hit Export button. That’s all.
Mac OS X版のPUDファイル・コンバーターBebop PU Readerの作者も私へのメッセージでGPXファイルの変換も将来的にサポートしたいと言っていました。これが実現すれば全ての操作がMac OS Xで完結します。
Author of Mac OS X version of PUD file converter Bebop PU Reader told me, he wants to implement GPX converter on his program in the future. If it is implemented, all operations can be done on Mac OS X.
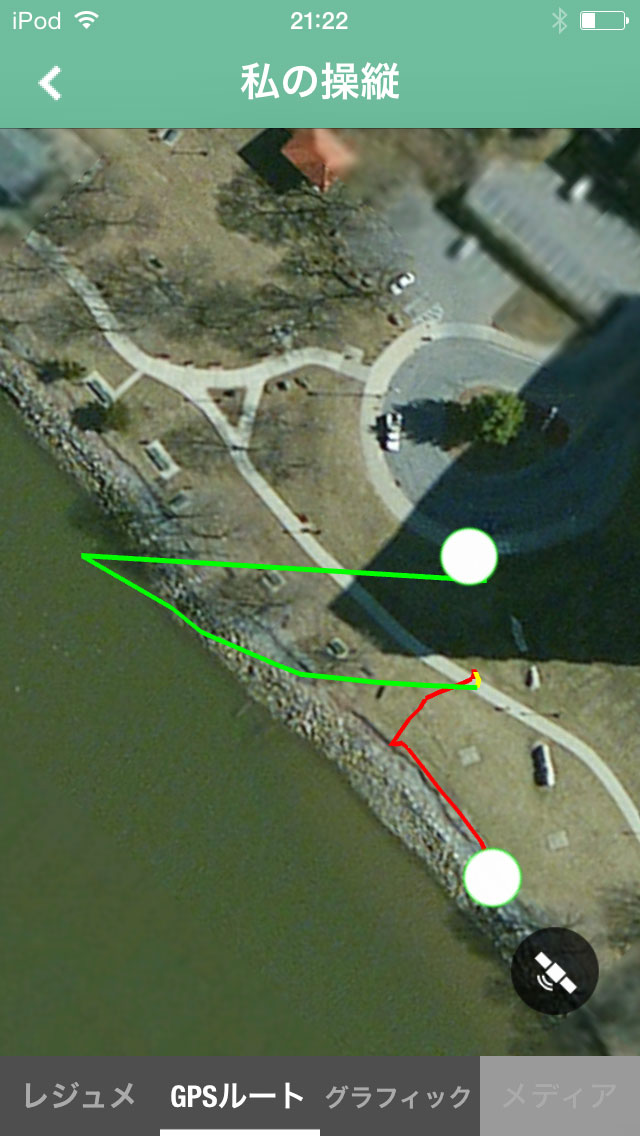
[ Garmin VIRB Editで動画とGPXデータを合成する / Overlay video file and GPX data using Garmin VIRB Edit ]
Reference: Garmin VIRB Editの紹介/Introduction to Garmin VIRB Edit
Geek Mag – Garmin Virb Edit: un logiciel de montage vidéo gratuit
上のリンクに実際の画面が多数ありますので参考にしてください。
There are many screen shots of VIRB Edit on above link, please refer them.
Garmin VIRB Editというフリーで公開されているツールを使用します。Windows版とMac OS X版の両方が公開されています。わたしはMac OS X版を使用しました。少し慣れが必要ですが処理の流れさえ掴めば難しくはありません。
- Bebopで作成された動画ファイルをインポートする
- 新規ビデオ作成を行う
- インポートした動画ファイルを作成したビデオのワークエリアにドロップして追加
- GPSの追加ボタンを押し、手動で選択、参照でGPXファイルを読み込みます
動画ファイルとGPXファイルのファイル名にはタイムスタンプが含まれています、それが一致したものを使用します
- GPSデータの内容を確認してGPSの追加ボタンを押します
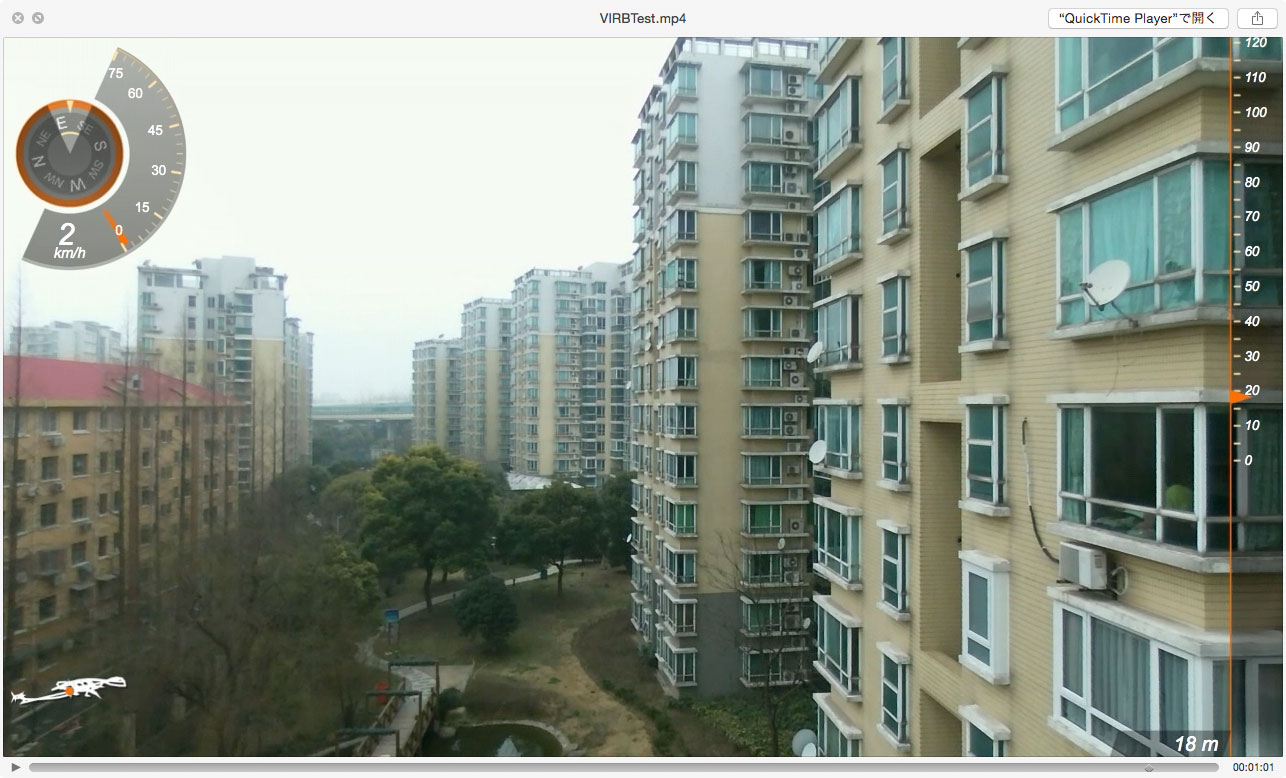
- 最下行の一番右のメーターアイコンをクリックしオーバーレイのテンプレートを選択します
- 最下行の左から二番目のハサミアイコンをクリックしGPS同期ボタンを押します
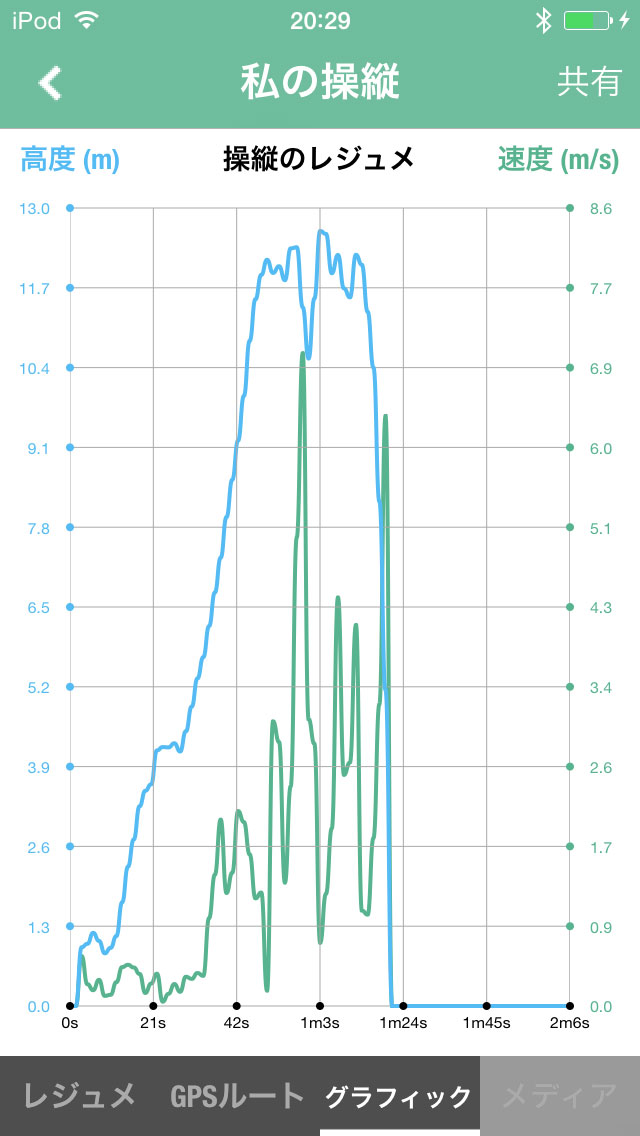
- 高度の変化などを頼りに動画とGPSデータを同期し、完了ボタンを押します
- エクスポートボタンで動画を出力したら完成です
I use Garmin VIRB Edit to overlay GPX data to video file. Both Windows and Mac OS X versions are available and free for use. I am using Mac OS X version. It may take time to use this tool, but if you understand work flow of Garmin VIRB Edit, operation would not be difficult.
- Import video file of the Bebop
- Do ‘Create Video’
- Drag and drop imported video file to your project
- Press ‘Add GPS…’ button and ‘Manual Selection’, then load GPX file
Both video file and GPX file have time stamp in their file name, you should use same time stamp in file name of video and GPX file
- Confirm GPS data contents and press ‘Add GPS..’ button
- Press ‘meter’ icon at bottom of the window and select overlay template
- Press ‘scissors’ icon at bottom of the window and press ‘GPS Sync…’
- Synchronize video and GPS data
- Press ‘Export’ button to export video