Parrot Bebopの操作アプリケーションであるFreeFlight3にDrone Academyへのアクセス機能があります。Parrotの過去のDroneと共通のユーザーコミュニティです。フライト情報をシェアし合うことに特に意味は感じませんでしたが、とりあえず登録しておきました。
自分のフライト情報が記録されるのが大きな利点であることに気づきました。これは是非とも登録しておくべきです。残念ながらフライト情報が送られるのはiOS版のFreeFlight3だけのようです。Android版も対応することを希望します。
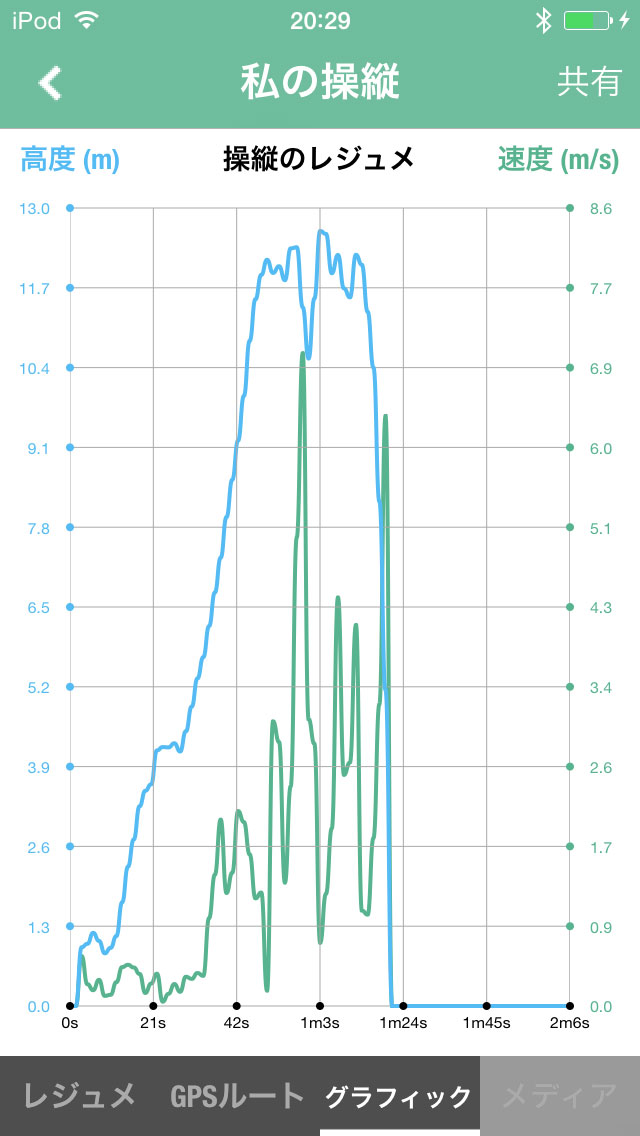
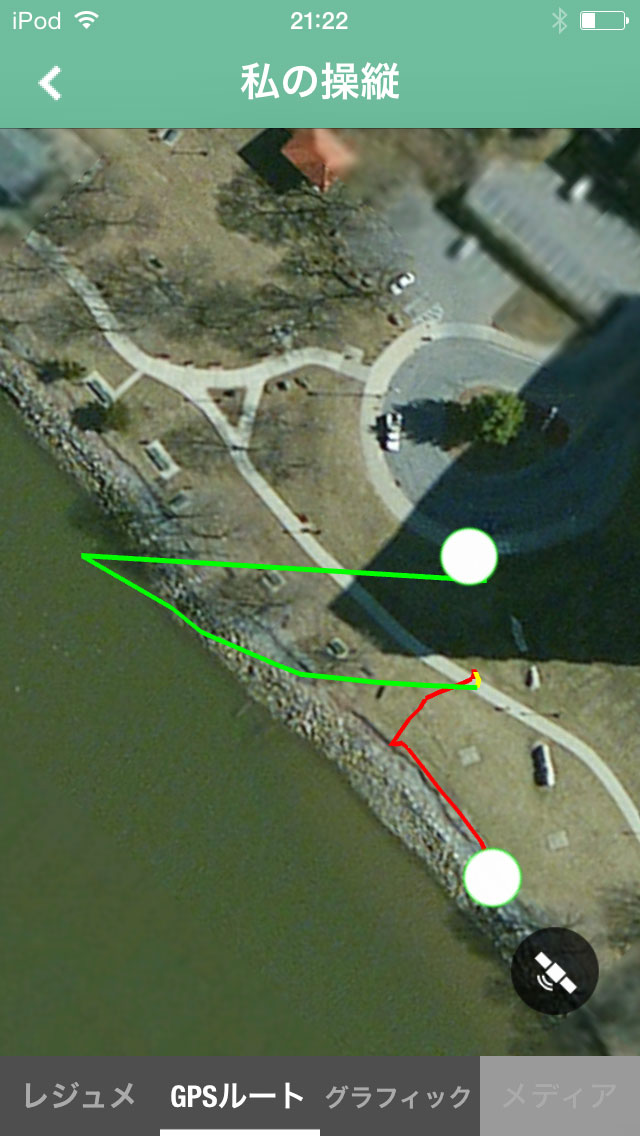
GPSを掴んでいれば地図上に飛行ルートがプロットされます。高度や速度のグラフが残るので、ずいぶん高く飛ばした気がするけど実際には15mか、などと後から振り返ることが出来ます。データとしては本体もしくはFreeFlight3に記録されているはずですが、見るすべがありません。Drone Academyの中でのみ、これらの画面が確認できます。
追加情報
Academyに送信するデータはBebop本体内に当然存在します。それを取り出して飛行データをcsv化するツールが発表されました。フランス語のブログですが、何となくは分かります。実データで検証できたら記事にしたいと思います。

SHIELD Portableでガンガン飛ばしてみました。上の写真はコントローラーを手にしているところをカメラを下向きに調整して自撮りしてみたものです。本当はトリガーでjpg写真が撮れるはずだったのですが、何故かうまく行かず動画からの切り取り画像を載せました。スティックのセンターリングの問題があり、手を離せば何時も空中で止められるわけではありませんが、軽くスティックで当て舵操作をしていると、そのうちに止まるような気がします。
最初はスティック操作がモード2準拠(まとめの「コントローラーのモード」参照)であることを忘れて低空飛行で接地させてしまいました。それも直ぐに慣れてビュンビュンと飛び回らせることが出来ました。下の動画は低高度を高速で飛ばしていて、勢い余って木の枝にぶつかってしまったものです。
後から気づいたのですが設定画面にて機体の回転速度(ラダー操作)がかなりゆっくりになっていました。急激な旋回はラダーとピッチで行うので、それが回避動作の遅れにつながったと思われます。ヘリコプター的に進行方向をいきなり変更すれば良いのですが、高速飛行している時は頭が完全に飛行機を飛ばしているモードになっています。
旋回時にはエルロンとラダーを併用して、ややバンクをとって旋回させると見た目が格好が良いです。ところが撮影した画像はスタビライザーが働いて、まったくバンクしていることが分かりません。これはこれで、ちょっと残念な気もします。
SHIELD PortableとiPod touchの両方で飛ばしていますが、やはりiPod touchの傾きで機体を操作するのにはなかなか慣れません。かといってタッチパネルでのジョイスティック風操作(端末の傾きによらず、画面上に描画されたジョイスティックを操作する)はもっと難しいです。上海に戻ったらiPad miniも試してみたいと思います。



ハドソン川沿いにある小さな公園に出かけてParrot Bebopの撮影をしてみました。風も穏やかで安定した飛行が出来ました。当日はiPod Touchでの操縦でした。適当な高度でホバリングさせておくとほとんど位置が変わりません。iPod Touchを地面に置いたまま長時間といっても電池が切れるまでの8分間ほどカメラで色々な角度から撮影できました。自律飛行が出来る機種だからこその一人撮影会です。
上の写真撮影の最後に思い立って、動画も撮りました。かなり大型のズームレンズを使用していたので移動しながらの撮影がブレブレになってしまいました。ちょうどタイミング良く画面を引いたところで電池切れによる自動着陸します。撮影開始からは最後まで操縦することなく安全に着陸しました。素晴らしいです。
せっかく景色の良い所で飛ばしたのでBebop搭載カメラの画像も載せておきます。欲張って長い間飛ばし過ぎたので動画としては冗長になってしまいました。
私にとってiPod touchでBebopを操作するのは、とにかく浮かせて置いて必要な分だけ少しづつ動かしていくようなイメージです。慣れてくるとそれなりに動かせるのですが、とっさの動作みたいなことが出来ません。やはりダイナミックな飛行を楽しむためには物理的なスティックが欲しいところです。Bebopのスティック操作をめぐる事情の説明と私の得た解答について説明します。
[ Skycontroller ]
Parrotの純正ソリューションです。単体では販売していないようです。最初からBebopとセットで購入する必要があります。大きなWiFiアンテナを備えているので電波の到達距離が伸びたり、ゴーグルを装着出来たりします。少し大きいことと値段が高いのが問題。また、未だアメリカでも販売されていないようです。 いつの間にかアメリカでも中国でも正式に販売され始めました。
[ iOSデバイス用ゲームコントローラー ]
iOS7からゲームコントローラーの規格が標準になりました。これでBebopが操縦できると良いのですが、今のところ実現はしていないです。Parrotの古い機種に対してはDrone Controlというアプリケーションで操作可能なようです。これがBebopに対応することを期待したいです。
ParrotはDroneを操作するためのSDKを公開しているので、こういったサードパーティ作成のアプリケーションも出てきます。ここのところは評価したいところですが、標準の操作アプリケーションであるFree Flight3がゲームコントローラーに対応してくれていても良いのにと思います。
[ NVIDIA SHIELD PORTABLE ]
これが唯一見つかったBebopで実績のある方法です。SHIELD TABと専用コントローラーでも大丈夫かも知れませんがSHIELD PORTABLEというのがコントローラーと小型Android端末が組み合わされておりソリューションとして完璧です。

どこにも詳細は書いてありませんが、Parrot純正のアプリケーションFree Flight3で何もしなくてもコントローラーが接続されていることを認識し左右のスティックで操縦出来るようになります。アプリケーションとしてコントローラーの存在を意識しているのは間違いなく、設定画面がコントローラーの有無で変わっています。
各キーとスクリーン上のタップを割り当てる機能があるので、使いやすいようにカスタマイズも可能です。Parrot ForumのNvidia Shield Flyingというスレッドにマップファイルも貼り付けられています。わたしはそのマップファイルを貰い、少しだけ修正を加えて使用しています。
電波の到達距離もiPhoneより遠くまで届くという報告もあがっています。
タブレットだけで操作する場合、手を離せば機体は一定の場所で静止します。スティックを利用する場合、この手を離すに相当する状態がないのでスティックが中央にあっても微妙にどちらかに動いていきます。物理的にスティックのセンターリングが完璧には出ないですし、トリムのような仕組みもないので仕方ないかもしれません。ソフトウェア的にスティックが中央で動いていないことを検知するような事は可能だとは思いますのでビタっと止まるように工夫して欲しいものです。自分でアプリケーションを作るならば、そこのところを工夫するでしょう。
スティック操作とタッチパネルによる飛行と、それぞれ利点があるように思います。しばらくは両方を試してみます。
SHEILD PORTABLEは出荷時にAndroid 4.2.xが搭載されていましたがシステムの更新により、4.4.2になりました。奇しくも私の初めてのKitKatデバイスとなりました。必要性はあまり無いですが日本語ロケールも完璧です。
Androidにもゲームコントローラーの標準があったと思いますが、他のAndroidデバイスとゲームコントローラーの組み合わせで同様にFree Flight3が使用できるのかどうかは良く分かりません。
追記) IPGEA、Moga Pro, PS3コントローラーとAndroidの組み合わせでBebopを操縦している例が見つかりました。セットアップに関しては詳しくは分かりませんが、ルート化が必要な記述が見受けられます。
屋外での初飛行を行いました。スティック無しでタッチパネル端末だけでの操縦性になかなか慣れないので室内での練習は諦めました。本体の大きさもHubsanよりは二回りほど大きいので室内でバンクをかけて飛び回るような事もどのみち出来ません。
離陸ボタンを押すと1メートルほどの高さでホバリングします。ホバリングは完全に自律的に行われますので、そこから落ち着いて操縦を始めることが出来ます。最初ですのであまり高度が上がらないようにアプリケーションの中で最高高度を40メートルほどに制限しておきました。そのため空撮としては、やや物足りない映像しか撮れていません。三種類の操縦モードを試してみましたがiPod Touchでは標準のものが一番適しています。これはタッチパネルのボタンを押さえながら端末の傾きで操縦するものですが、なかなか感覚が付いていかず苦労しています。細かい操作はやはりスティックによる操作にはかなわないと思いました。
画像がすこぶる安定しているのは、飛行姿勢が安定しているだけではありません。搭載カメラの画像はデジタルながら3軸スタビライザー同様の補正が働いています。実際にはエルロンも多用して横移動やバンクをつけた旋回も行っていますが画像の水平はほぼ保たれたままです。スタビライザー機能が、かなり高性能であることが分かります。
着陸が少々ハードですが自分で高度を下げすぎました、本来であれば地上1, 2メートルまで降ろした後はランディングボタンを押して自動で着陸させます。
まだ操縦に不慣れなためクラッシュしてしまいました。高速飛行を楽しもうとして高度が下がりすぎて接地し、転がりました。幸い本体にダメージはありませんでした。
次は、もう少し見て楽しめる画像が撮れるようにしたいと思います。
フランスのParrot社の新しいカメラ搭載ドローンBebopの紹介です。発表されたのは随分前で待ち遠しく思っている人多数だった製品です。アメリカでは2014年のクリスマスに合わせて発売が開始されました。日本でも発売されるようですが、はっきりとした発売日は発表されていないようです。

パッケージには本体のほか、充電器、予備バッテリー、予備のプロペラ一式が含まれています。もし追加購入するとすればバッテリーくらいでしょうか。バッテリー2個で20分ほど飛ばせるそうなので追加バッテリーの必要性は運用次第です。

最初、バッテリーの装着の方法が分からなかった。本体の中から細い紐が出ているので、それを引いて電源コネクターを引っ張り出す必要があります。

Bebopの特徴であるカメラ。1400万画素、スーパーワイド、スタビライザー(デジタル)、遠隔操作による視野コントロールと考え得る最高の性能です。ただ大きなレンズが剥きだしてなところに不安もあります。実際Youtubeにはクラッシュしてカメラを壊した例も上がっています。

以前レポートしたHubsanは古くからあるラジコンヘリと同様の製品でジャイロで姿勢を保つものの高度や細かな姿勢の変化は操縦者が常にコントロールする必要がありました。そのためホバリングが出来るまでにかなりの練習が必要でした。Parrot Bebopはまったく別次元のドローンです。各種センサーを駆使して完全な自律飛行を行います。離陸させると自動的に一定の高度でホバリングしてくれます。そのため上の写真も一人で離陸させて撮影することが出来ました。Hubsanでは考えられないことです。
操縦はiOSデバイスもしくはAndroidデバイスのアプリケーションから行います。タッチパネル上で高度の調整、飛行方向はデバイスを傾けることで行います。ラジコン派としては今ひとつなじまない気もします。スティックの付いた専用コントローラー付きのセットもありますが、かなり大きい上に値段も高いです。ゲーム用のコントローラーで操縦するという試みも行われていますので、今後の研究課題とします。
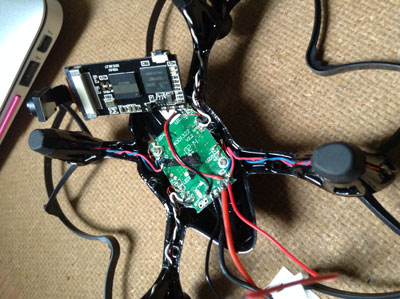
クワッドコプターHUBSAN X4 H107Cの搭載カメラは前方に固定されています。大型機で撮影した画像には真下を向いたものが良くあるので、下向きのカメラを付けてみようと思い、またしても工作に励んでみることに、、、
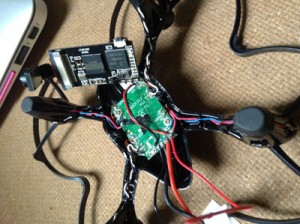 |
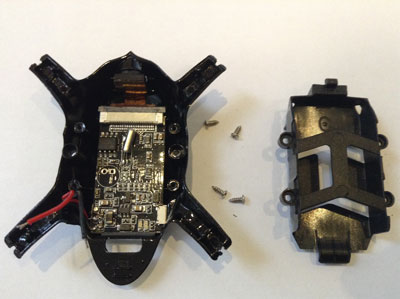
本体を開けて電源リード線を追加した。 |
 |
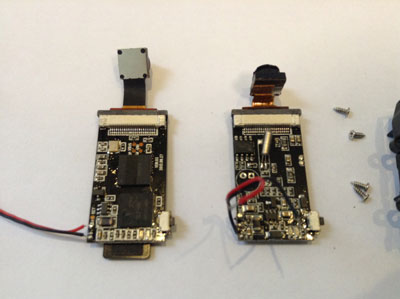
追加するカメラモジュールに電源リード線を接続。バラバラしないようリード線を本体の足に固定した。 |
 |
カメラモジュールを保護するために透明なビニールでラップして両面テープで本体に貼り付けた。カメラ自体はフレキケーブルの先にありあえて固定していない。この状態で飛ばしてみたところ、カメラがかなり細かく本体の振動を拾ってしまい飛んでいる間の画像はずっとブレまくりだった。 |
 |
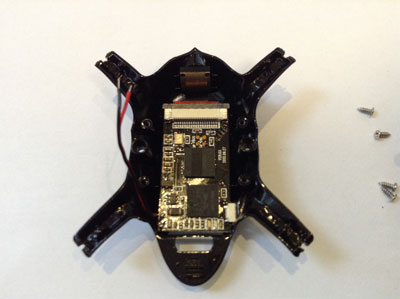
カメラモジュールを少しずらしてカメラ自体を本体に両面テープで固定したところ、何とか見られる画像が撮れるようになった。 |
下のように映像は何とか撮れました。しかしながら思ったほど良い映像は撮れませんでした。下向きの画像はよほど高度が稼げるか、何かしら絵として面白いものを映し込む努力をしないと迫力ある映像にはならないようです。
また本体の重量が重くなるので、何とか飛ばせるもののもっさりとした飛行になってしまいます。
挙句の果てはハードランディングの際に下向きカメラのレンズに傷が入ってしまいました。実験としては面白かったです。これにて追加のカメラモジュールは外すこととします。

クワッドコプターHUBSAN X4 H107Cの搭載カメラで動画を撮影するためにはFATでフォーマットしたMicroSDカードを使います。カメラモジュールにはMicroSDカードスロットの近くに緑と赤のLEDがあります。緑だけが点灯している状態で横にある小さなボタンを一度押すと撮影開始し赤いLEDが点滅を初めます。もう一度、同じボタンを押すと撮影が終了します。データの書き込みが完了すると赤いLEDも消えます。
後はMicroSDカードを取り出してパソコン上で再生します。本体にはファイルの管理機能はありませんので、容量が足りなくなる前にパソコンにてフォーマットするなりファイルを消すなりします。
連続撮影時間は、飛行時間よりはるかに長いことは確認しています。1GBのカードを入れてみたところ25分ほどで自動的に撮影が完了し1GB近いファイルが出来ました。これが一回の撮影時間の限界なのかカードの残り容量によるものかは確認出来ていません。いずれにしろ、バッテリーをの持ち時間よりも長く撮影できることは間違い有りません。ただし撮影完了前にバッテリー切れになった場合は動画が保管されませんので、飛行終了とともにボタンを押して撮影を完了させるべきでしょう。
無風の日に頑張って高度を稼いでみました。機体が小さくてよく見えないし電波の到達距離も良くわからないので今のところマンションの6, 7階くらいの高度が限界でした。
その飛行の様子を6階の窓から撮影したのが下の動画です。
1) まずは、ホパリング中心の基礎練習をみっちりと行います。
2) ホパリングが出来たら、少しエレベーターを前に倒して前進してみます。時にはエレベーターを後ろに倒して後進も交えてみます。エレベーターを操作すると同時にスロットルも調整しないと高度がどんどん変わってしまいます。
3) 前後に動いているうちにどんどんズレて壁に近づいてしまいますので、エルロンで左右の位置を修正出来るようにします。
4) 次はラダーの練習です。ホパリング中にラダーを少し倒してみます。機体が回転すると同時に高度も極端に変わるのでスロットルも調整します。最初は機体の回転に合わせて自分自身も移動して機体の後ろに回りこまないとホパリングを維持することも難しいでしょう。
5) ラダーが操作出来るようになると、ホパリングからエレベーターで前進、またホパリングしラダーで方向を変更、そこからエレベーター前進。というように色々な場所に移動できるようになります。これも常に機体の後方に自分が移動して行うと分かりやすいです。
ここまで出来れば初心者としては上出来でしょう。いよいよ中級者への仲間入りです。
6) 今まで機体を地面に置く場合、自分が機体の後方に位置するようにしていたと思います。ここでは機体を自分の方に向けて置いてみます。そのまま上昇させてホパリングを試してみます。今までと違い機体の見た目の挙動に対してエレベーターもエルロンも逆の操作を行わなければなりません。これが出来ないことには自由に飛ばすことは出来ません。特に屋外飛行はとても無理です。
7) ひたすら対面状態でのホパリングを練習してエレベーター、エルロンの操作に慣れます。対面状態のまま前後左右に動かせるようになれば、機体の後を追いかけること無く自由に飛ばせるようになります。
そろそろ大胆な操作が出来るようになります。離陸するときも、最初はじわじわと高度を上げているのが目の高さまで一気に上げる事が出来るようになります。
8) 少しスピードを出して前進し停止。ラダーで方向転換しまたスピードを出して前進を繰り返し練習。これは直ぐ出来るようになると思います。
9) スピードを出したままラダーを操作しターンしてみます。これを何度も繰り返すと停止すること無く部屋の中を飛び回る事が出来るようになります。ここまで来ると屋外で自由自在に飛ばす事が出来るようになります。
私は飛行機を飛ばしていたためか、ヘリコプター的にホパリング主体で飛ばしたりバックしたりするより、ビュンビュンと飛び回るのが楽しいです。只今の目標は、ターンのきっかけでエルロンを少し入れて綺麗なバンクを取った大きなターンを出来るようにすることです。