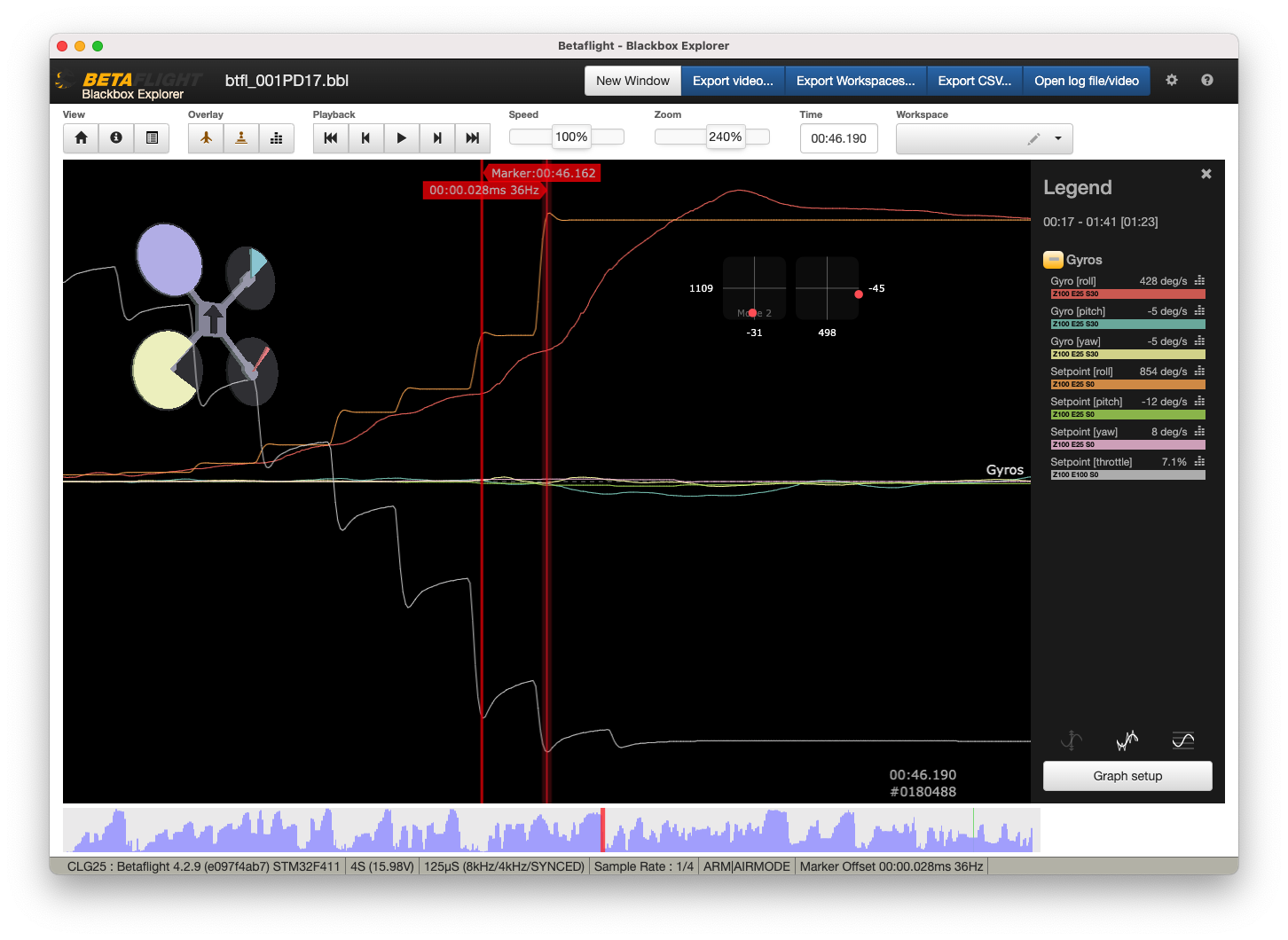
20:58 – Viewing your Blackbox log
– BlackboxタブでActivate Mass Storage Device ModeをクリックするとFC上のフラッシュチップがPCにドライブとして接続されます
– btfl_001.bblファイルをダブルクリックしてBlackbox Explorerを起動します
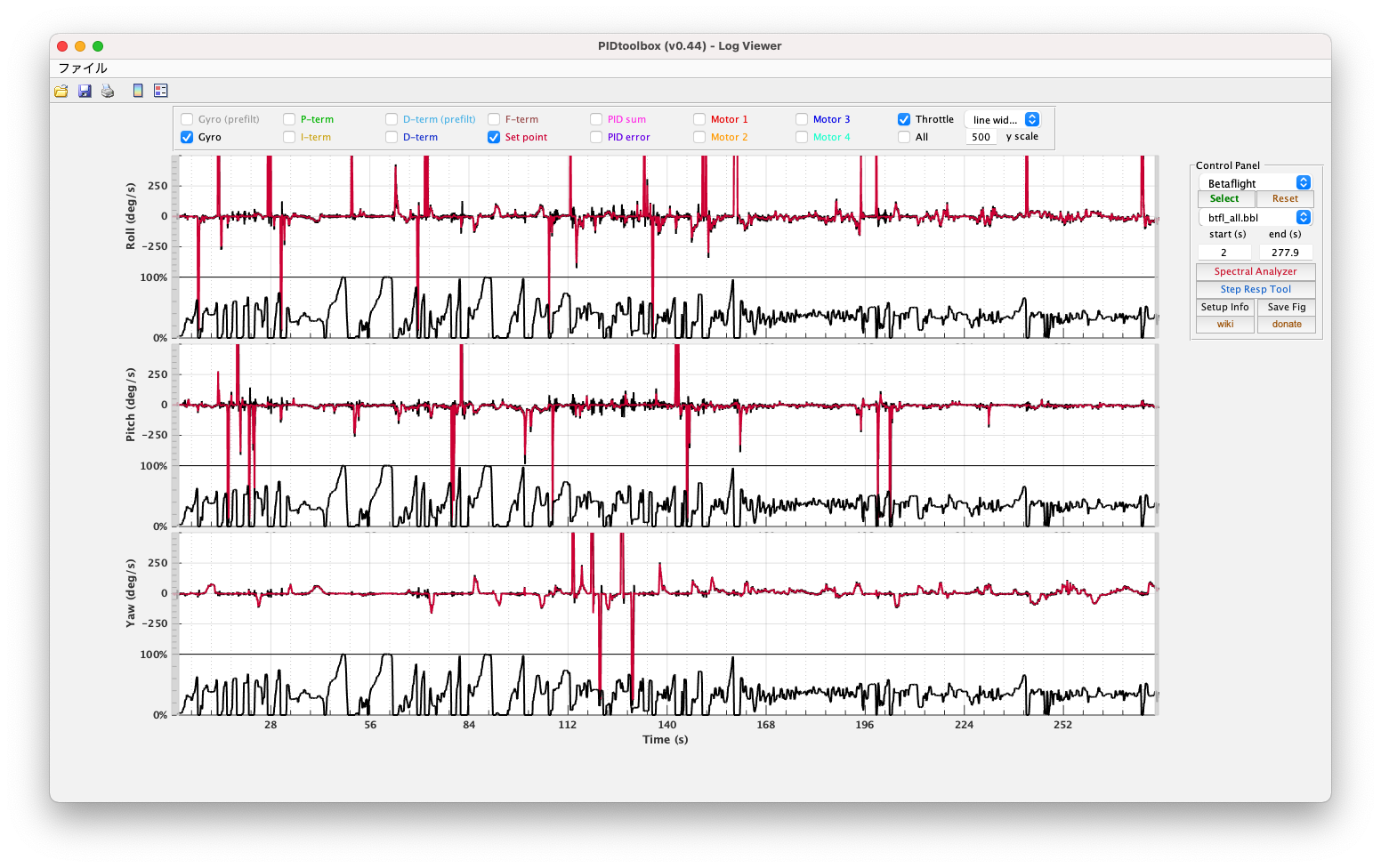
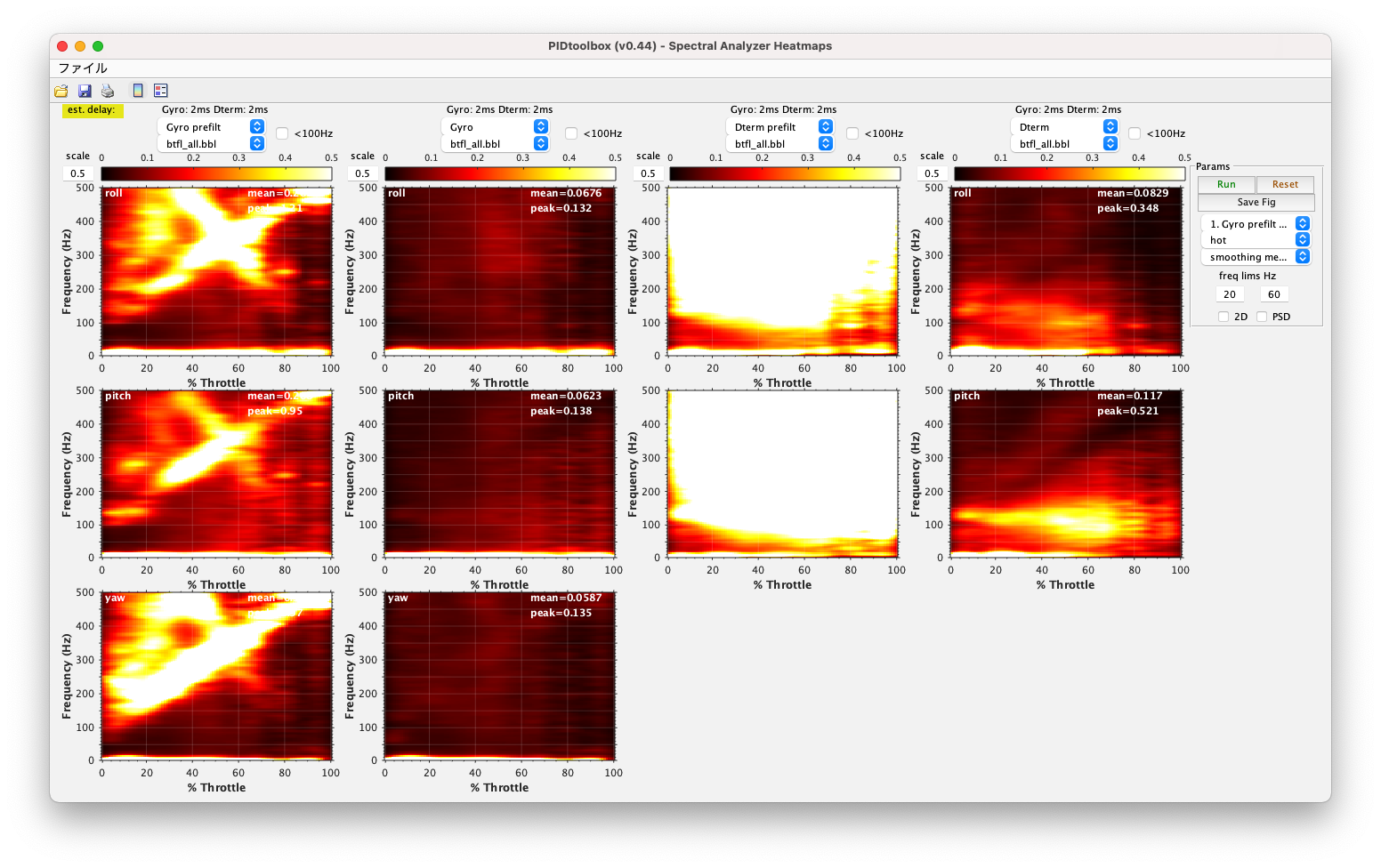
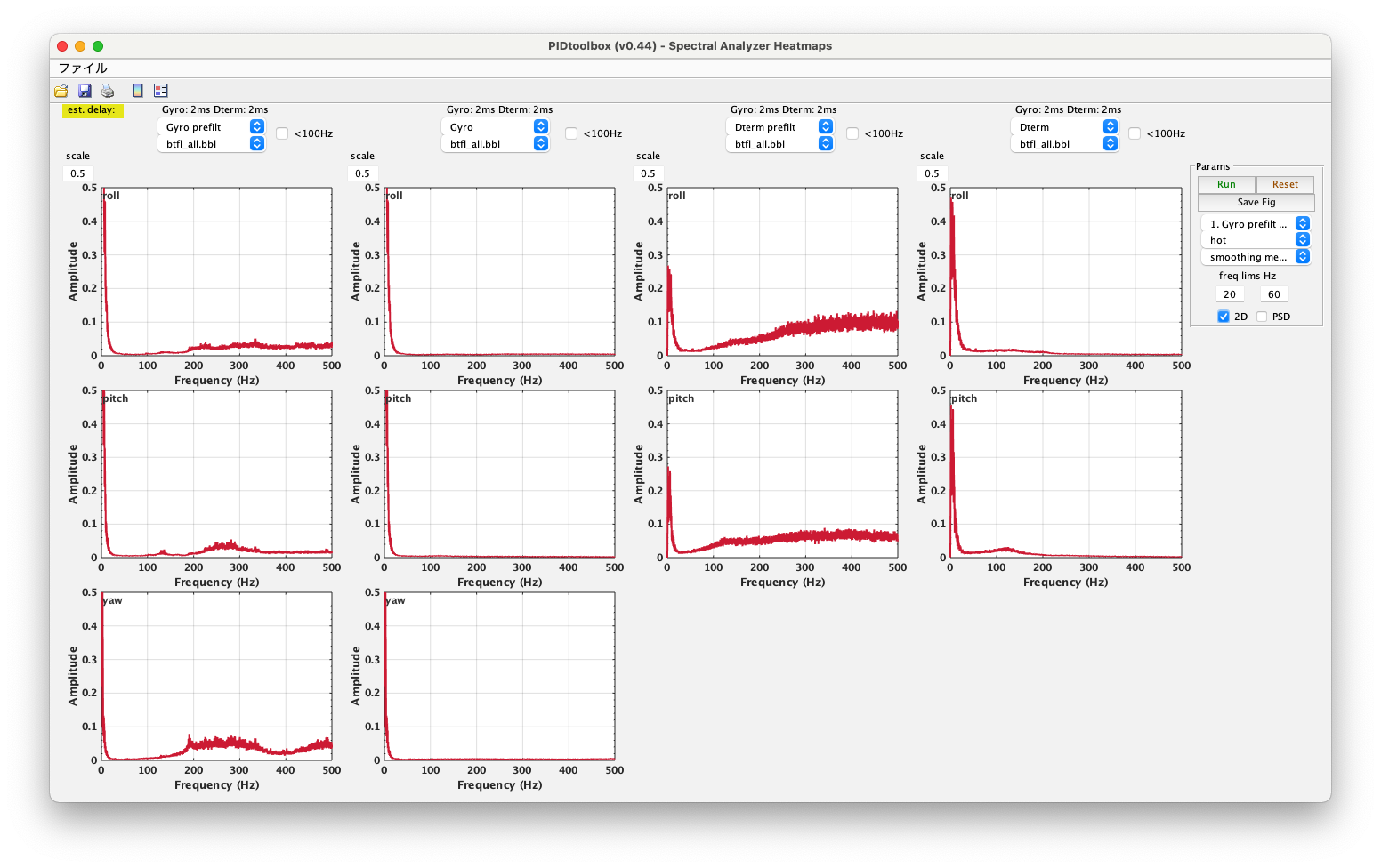
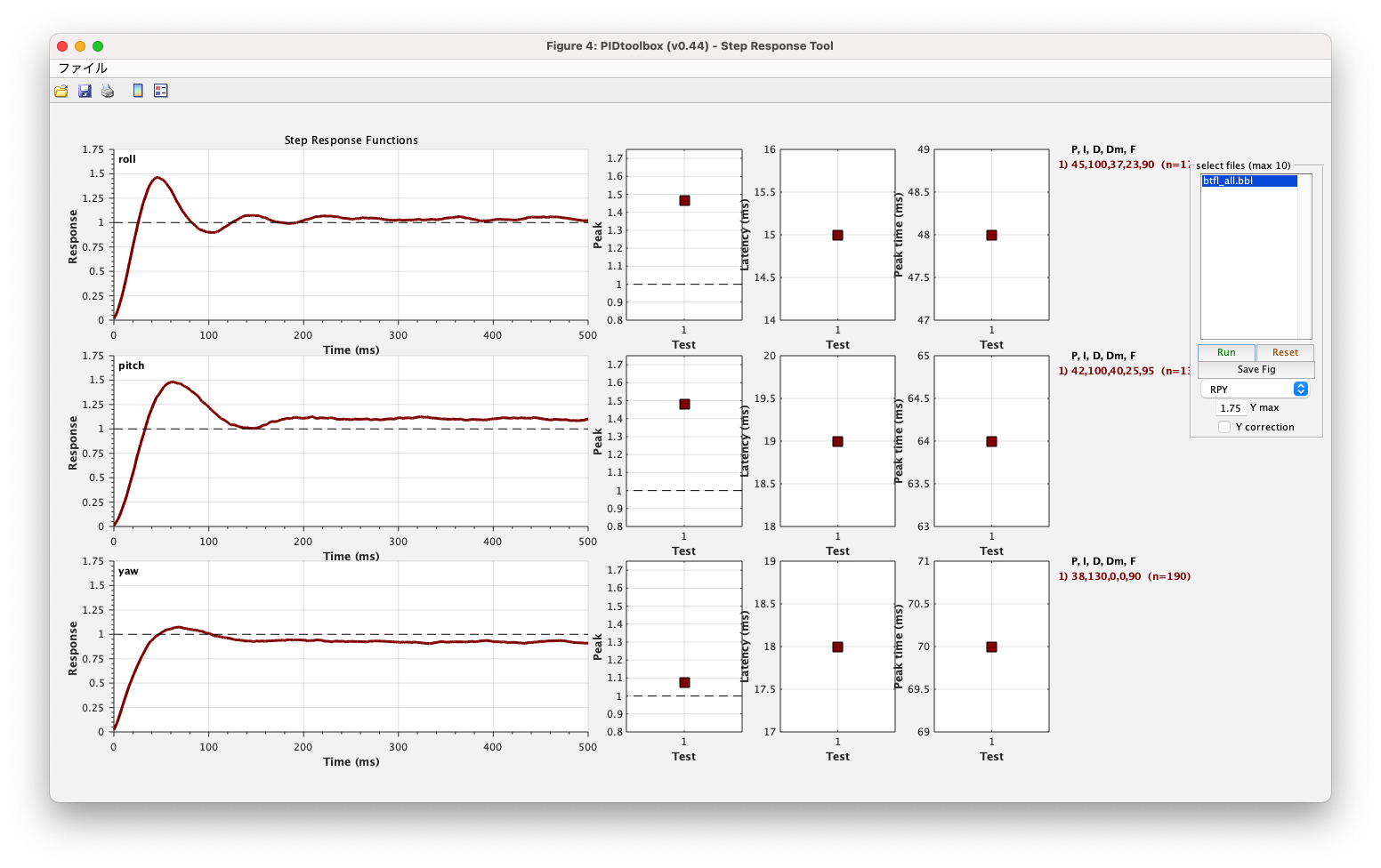
– ログが開いたらGyro scaledをクリックしてスペクトログラフを開きます [Graph setup/+Add graph/Debugの追加が必要かも]
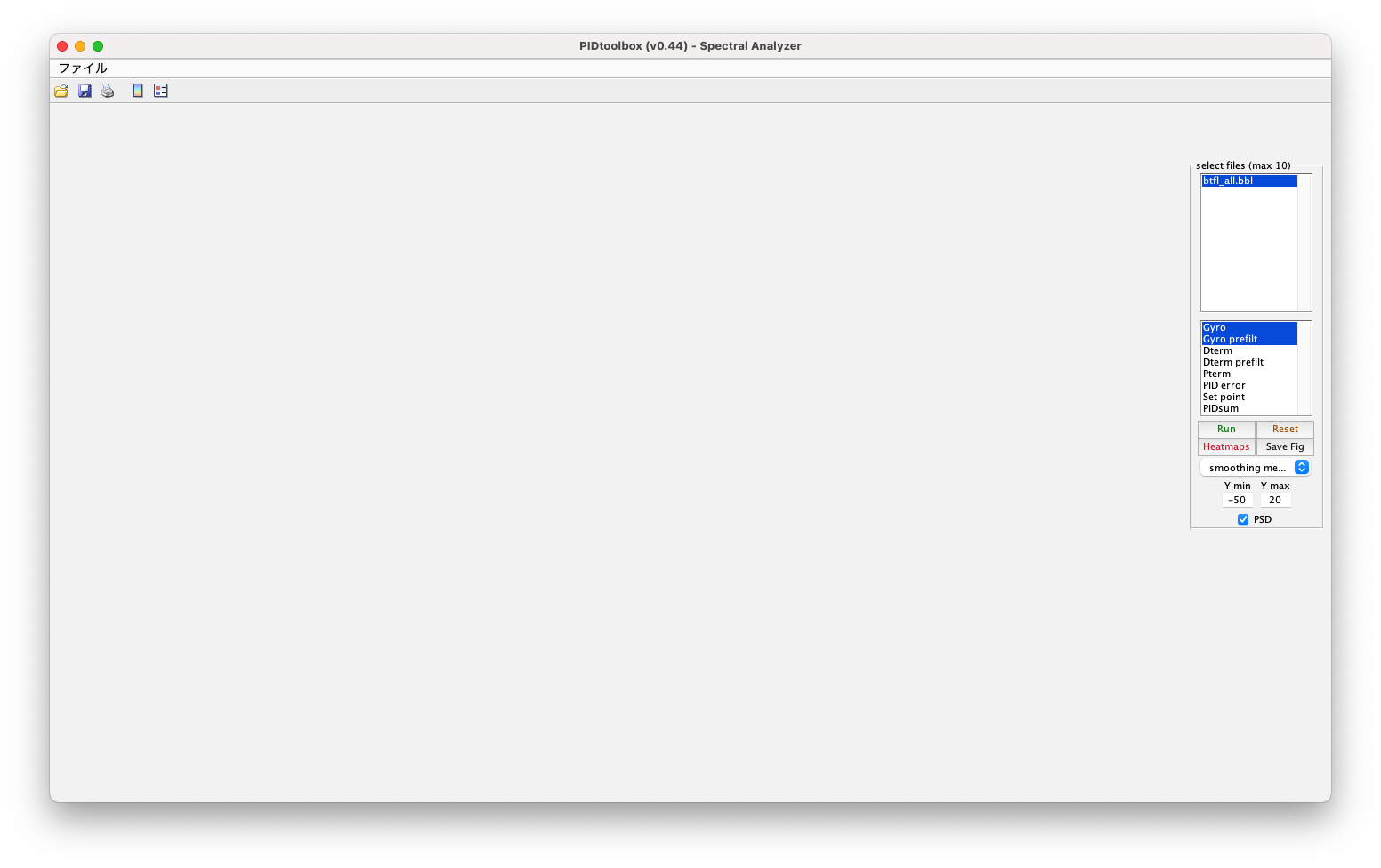
– 左上でFreq. vs Throttleを選択します
– 右上のスライダーでゲインを調整し、3軸とも確認します
23:00 – What is each filter best at? – Gyro
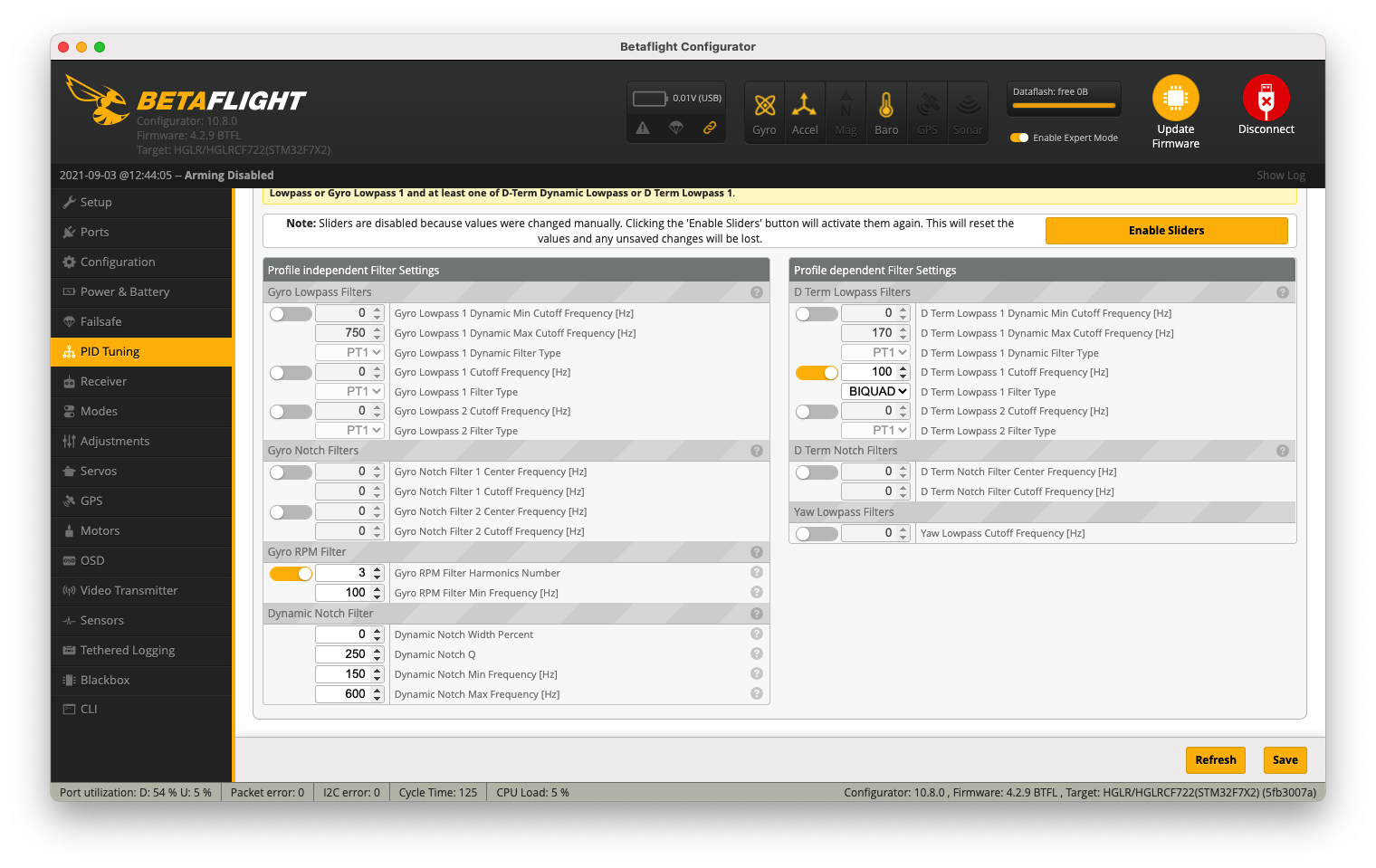
– RPMフィルターがモーターノイズに最適です
– dynamic notchはフレーム共振にロックして取り除きます
– 上手に組み上げられていればその他のフィルター(low passなど)は必要ありません
– よって、私達はしばしばそれらをオフにします
25:54 – What is each filter best at? – D Term
– D Termが少しややこしいのはデリバティブ機能 [PIDのD] の性質として高い周波数の動きをより増幅するからです、そのためもし何もフィルターを使用しなかった場合、高い周波数のノイズが増幅されPIDループに過剰に作用し振動やモーターの加熱、フライアウェイなどにつながります
– ですから必ずlow passフィルターが必要です
– もしgyro low passフィルターをオフにしたらD Termのlow passフィルターは少し強くした方が良い
– 一般に、この方法 [Gyro low passオフ、D Term low pass強め] の方が位相遅延を少なくしフィルターの質を改善出来る
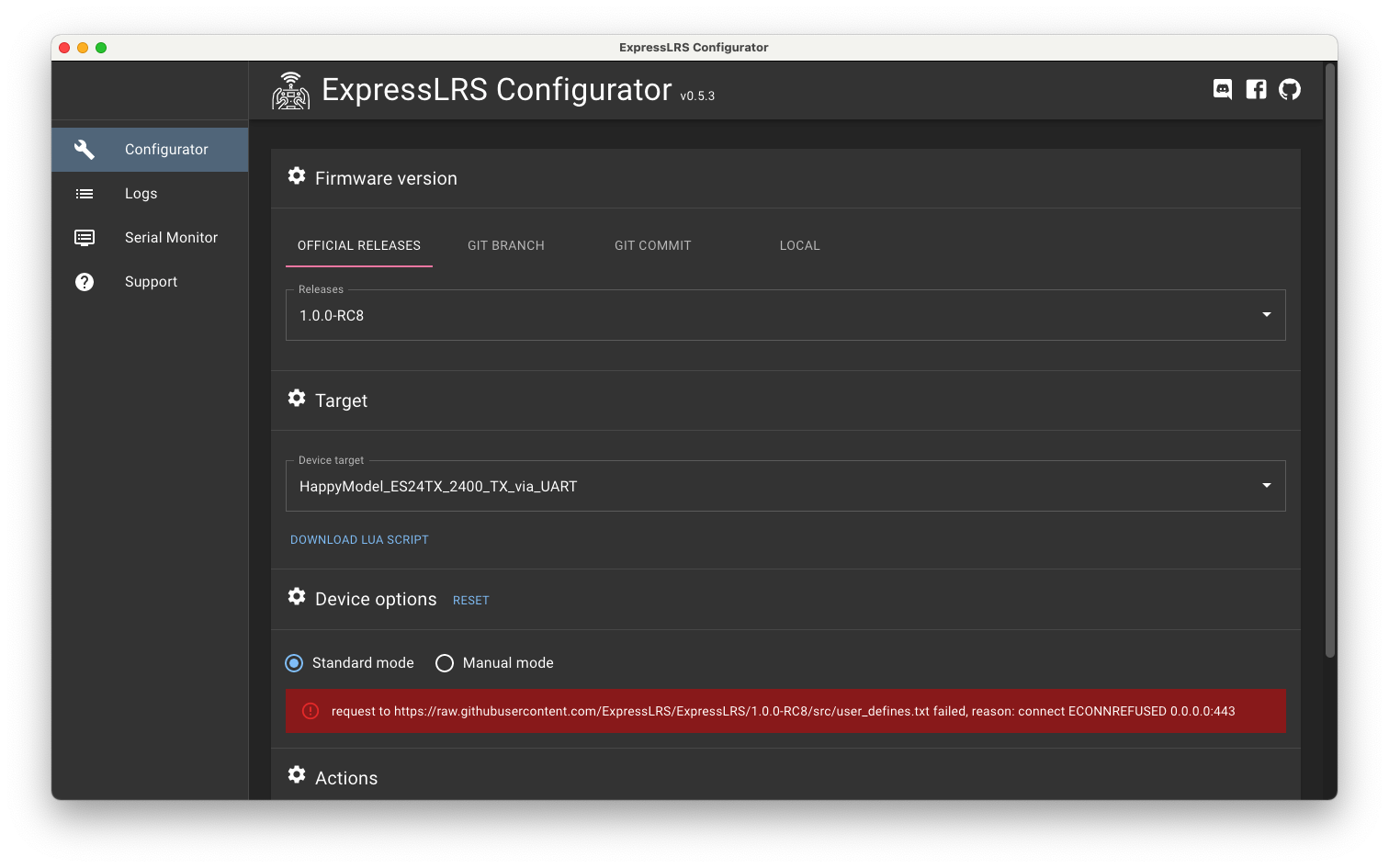
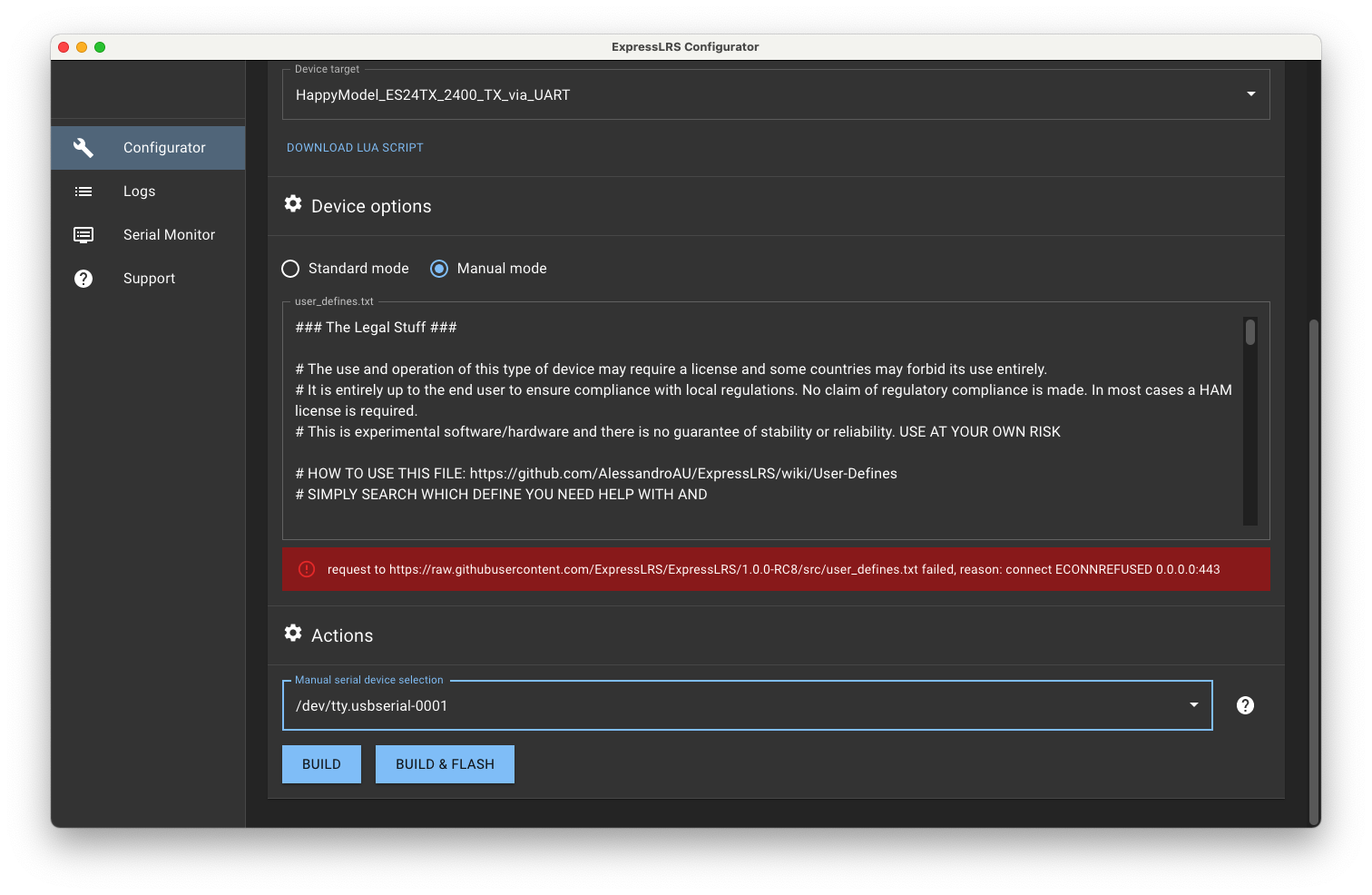
# The use and operation of this type of device may require a license and some countries may forbid its use entirely.
# It is entirely up to the end user to ensure compliance with local regulations. No claim of regulatory compliance is made. In most cases a HAM license is required.
# This is experimental software/hardware and there is no guarantee of stability or reliability. USE AT YOUR OWN RISK
# HOW TO USE THIS FILE: https://github.com/AlessandroAU/ExpressLRS/wiki/User-Defines
# SIMPLY SEARCH WHICH DEFINE YOU NEED HELP WITH AND
### BINDING PHRASE: ###
# Uncomment the line below to use a hardcoded binding phrase
# Leave commented to use traditional binding
-DMY_BINDING_PHRASE=”MyBindingPhrase”
#unlocks >250mw output power for R9M and Happy Model ES915TX (Fan mod suggested: https://github.com/AlessandroAU/ExpressLRS/wiki/R9M-Fan-Mod-Cover)
#-DUNLOCK_HIGHER_POWER
[ Betaflight ]
ほぼCrossfireと同じです。ReceiverはSerial based receiver/CRSFを選択します。アナログVTXの場合はOSDでLQを選択すると信号が確認できます。信号強度RSSIもありますが、一般的にはLQだけ見ておけばよいです。DJI Digital FPVの場合はOSDがフルサポートではないので従来通りのAUXに割り当てられたLQ/RSSIをOSDで見るようにします。AUX11がLQ, AUX12がRSSIをあらわします。