ひょんなことからTinySA Ultraという簡便なスペクトルアナライザーが6GHzまで対応しているらしいことを知りました。これならVTXの電波が見えるのではないかと思い試すことにしました。
詳細な情報はTinySA Wikiにまとまっています。
[ セルフテストとキャリブレーション ]
最初にテストと校正を行えとのことなのでやってみます。
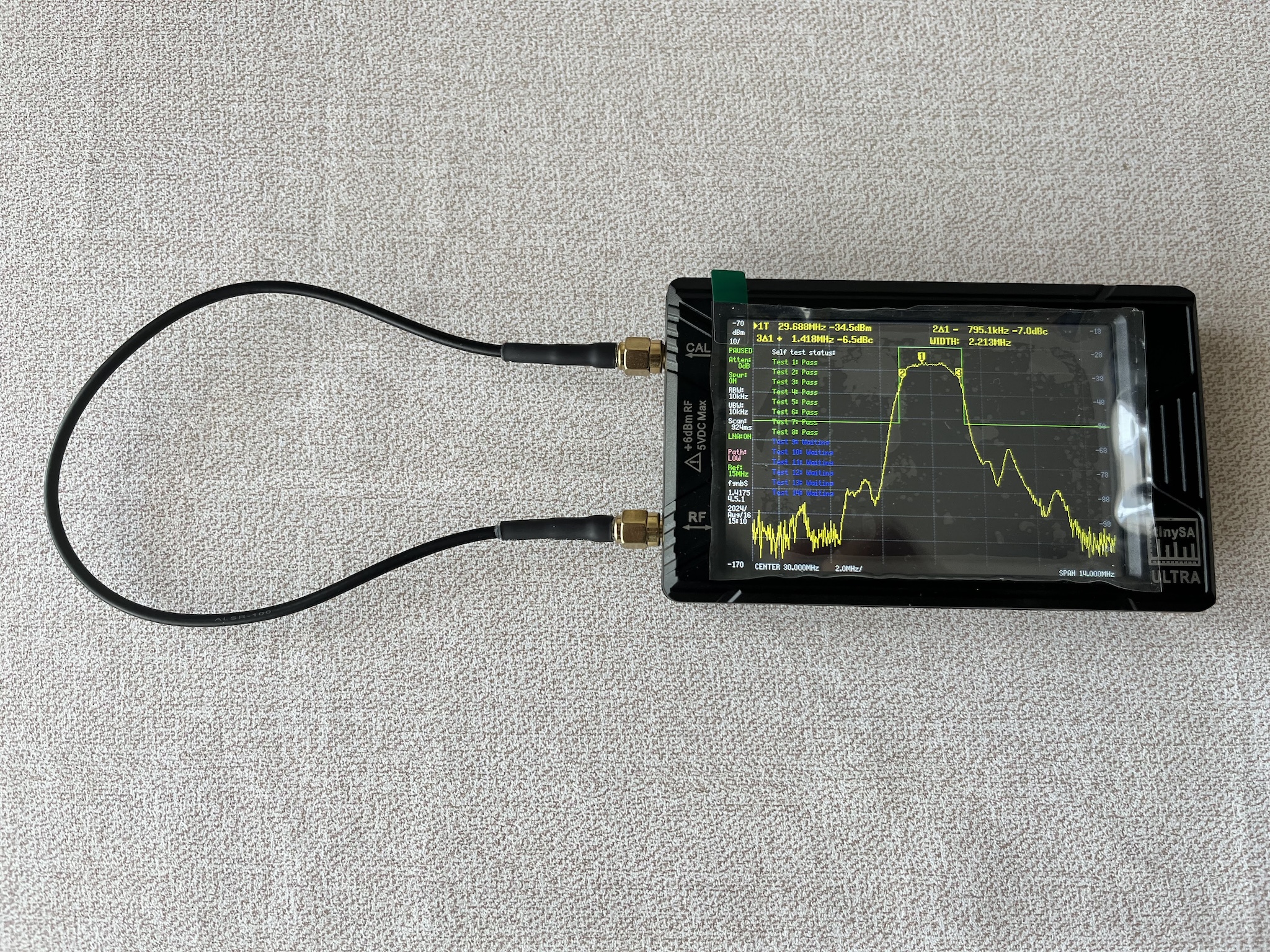
まずは付属しているケーブルで上下のポートを接続します。画面をタップ(今時の静電式ではなく感圧式です)するとメニューが出ますのでCONFIG/SELF TESTを実行します。
続いてLEVEL CALを実行します。
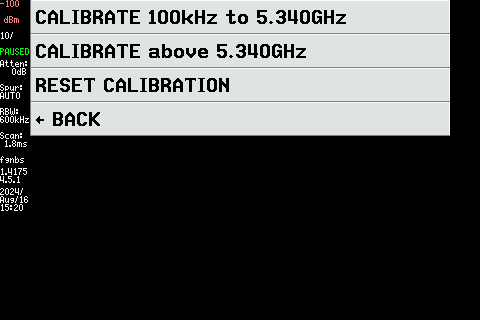
こんなふうに5.34GHzを境に分かれています。CALIBRATE 100kHz to 5.340GHzを実行します。残念ながらVTXの周波数が含まれるCALIBRATE above 5.340GHzの方はTinySA単体では実行できないようです。まぁ精密な測定を行うわけではないので校正せずに進めます。
[ ENABLE ULTRA ]
6GHzまで測定するためにはCONFIG/->MORE/ENABLE ULTRAを有効にします。この時Unlock Codeを聞かれるので4321と入力します。
[ VTXの電波を見る ]
細かい設定はまだ良くわかっていませんが、とりあえずはVTXの電波は見ることが出来ました。
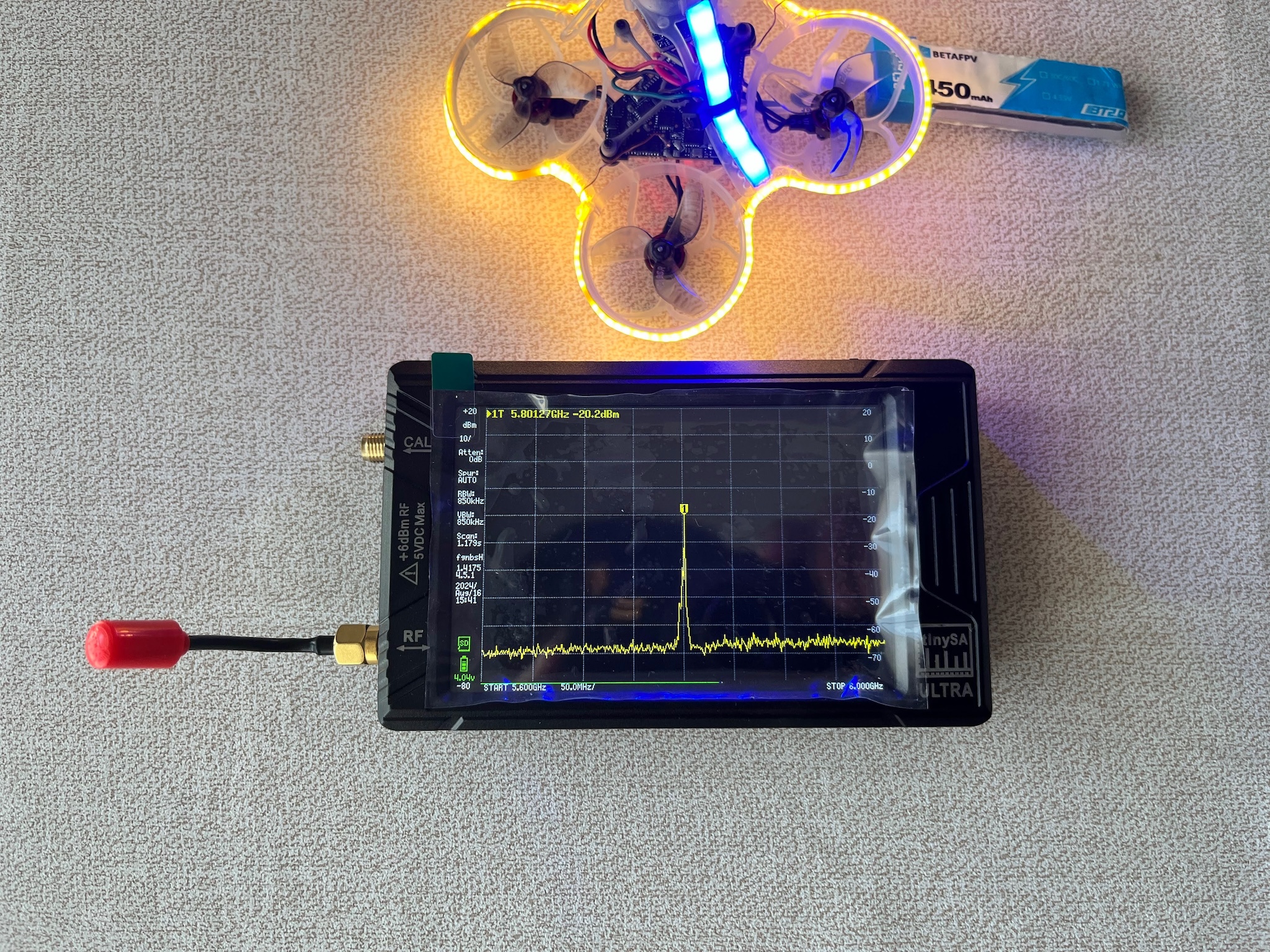
下のポートに適当なアンテナを接続して周波数を設定しただけです。
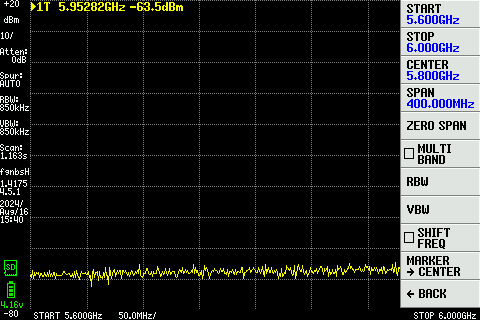
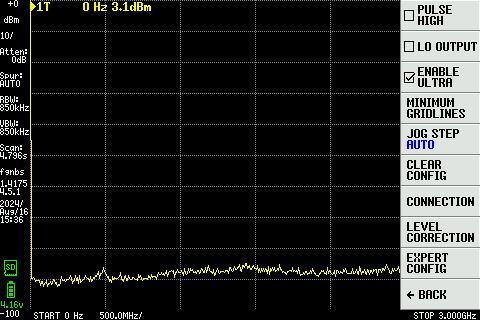
トップメニューのFREQUENCYに入ります。STARTとSTOPの周波数を設定します。私はそれぞれ5.6GHzと6GHzにしてみました。
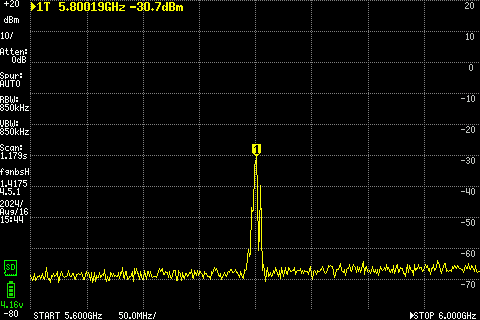
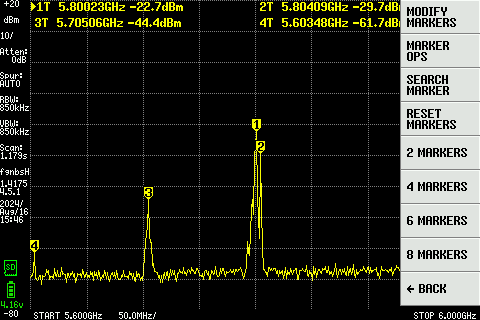
実際の電波を見たところです。F4(5800MHz)が見えています。ピークを検出して周波数を教えてくれるのが便利です。規定値ではひとつの周波数しか教えてもらえないので設定を変更します。トップメニューのMARKERに入ります。私は4 MARKERSにしてみました。
そしてE1, F1, F4の電波を同時に出してみました。
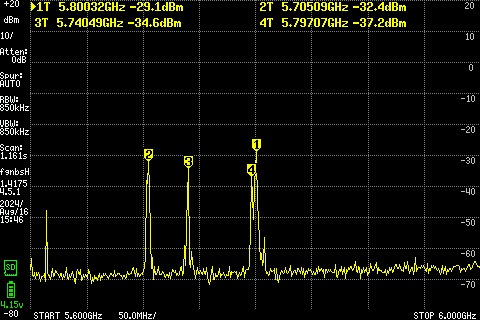
大体良い感じです。残念ながら毒電波を吐くVTXが手元にないので、悪い事例を紹介することはできませんでした。
[ 設定の保管 ]
ここまで行った設定をいつでも呼び出せるように保管しておきます。
トップメニューからPRESET/STORE/STORE 1にVTXという名前で保管しました。
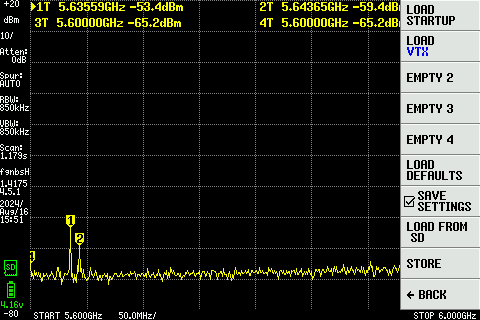
これでいつでも設定が呼び出せます。また’STORE AS STARTUP’で起動時に読み込まれます。
[ SCREEN COPY ]
STORAGE/SAVE CAPTUREで画面のコピーがSDカードにBMPフォーマットで保管できます。いちいち名前を付けないと行けないのがちょっと面倒です。このブログにしようしている画面はWindowsのアプリから取り込んだものです。こちらはPNGフォーマットでした。このアプリ、すぐに接続は切れるし思うように動かないしで今ひとつですので詳しいことは省きます。
[ Water Fall表示 ]
トップメニュー/DISPLAY/WATER FALLをオンにすると時間経過とともに一定強度の信号を受信した記録が残ります。つまり少しだけ時間を遡って電波の状態を調べることが出来ます。
昨晩、某氏より教えてもらったTinySA UltraのWater Fall表示。電波監視に常用したい機能。 pic.twitter.com/nroj8PAYeS
— コザック KozakFPV (@nkozawa) August 18, 2024
[ おまけ ]
HDZeroのNarrowモードが本当に17MHz帯域幅なのかどうかを調べてみました。
HDZero Narrowが本当に17MHz幅になっているのを確認出来た pic.twitter.com/cUEMdpaAb0
— コザック KozakFPV (@nkozawa) August 16, 2024