注意)
ちょっと気になるパーツがいくつかあってブラシモーターの小型機、Tinywhoopなスタイルの機体を2機作ることにしました。一機目はBETAFPVのパーツを中心とした構成の8520モーター搭載の室内機としてはやや大きめの機体です。
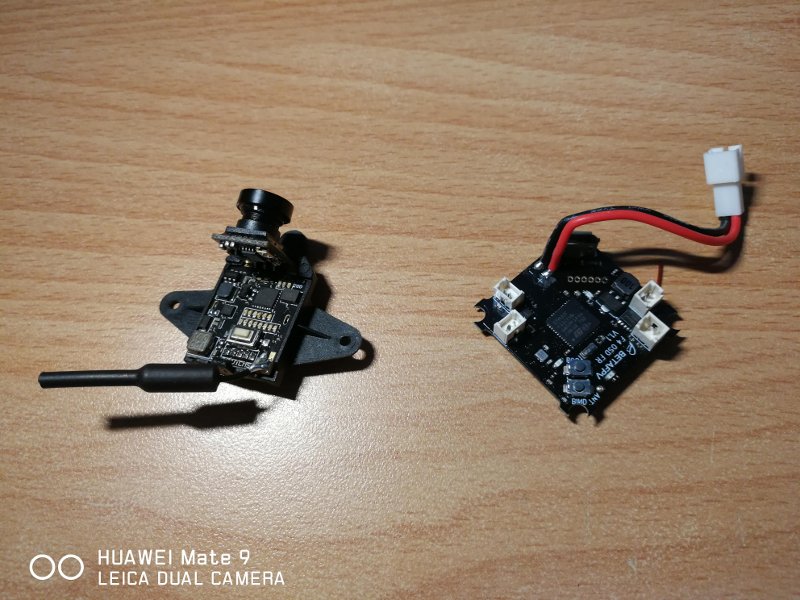
[ 部品構成 ] FC : F4 Brushed Flight Controller (Frsky Rx + OSD) Camera + VTX : Z02 AIO Camera 5.8G VTX Frame : 85mm Micro Whoop Frame for 8.5x20mm Motors Prop : 48mm 3-blade Micro Whoop Propellers Canopy : Canopy for Tiny Whoop Quads Motors : Ryze TechのトイドローンTelloから外した8520モーター、詳細は不明だが力強いBattery : 手持ちの450mAhのLipo
と、モーターと電池以外はすべてBetaFPVで統一してみました。
[ FCの特徴 ]
[ Camera + VTXの特徴 ]
最近、OpenTXユーザーとなったわたしにとってはTinyながらTelemetryが使えることにOSDよりも興奮します。正確なRSSIが得られますし、バッテリーの電圧値を送信機に喋らせることが出来ます。Smart AudioもあるのでVTXの設定もLua Scriptで済ませられると考えるだけでわくわくします。
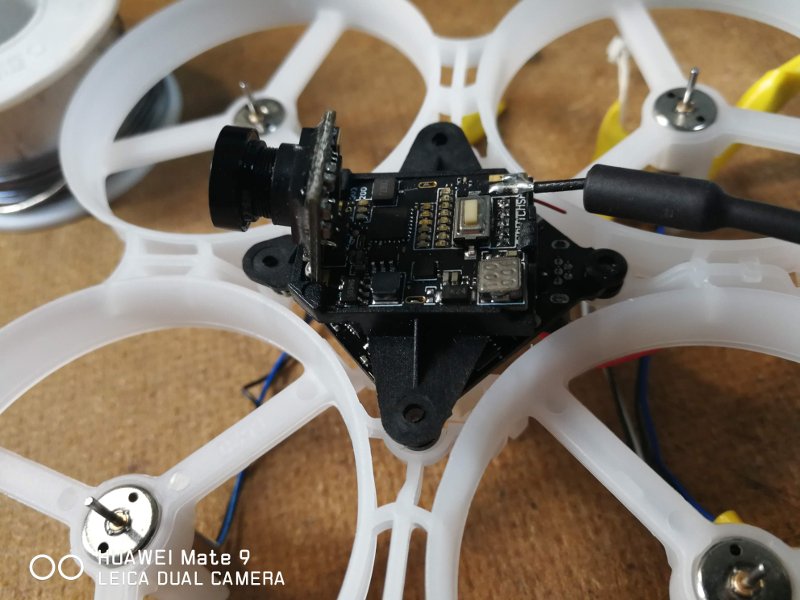
FCとCamera+VTXをコネクターで接続すると、あとはフレームに載せてモーターを接続するだけで飛びます。リード線を引き回すなんてことが必要ないスマートな構成です。
[ 設定 ] PROJECT MOCKINGBIRD v1.1b 準拠にしました。フィルターその他は変更していません。
[ バインド ]
[ 飛びっぷり ]
不具合というか、おそらくはハズレFCを引いてしまったのだと思いますが、連続して飛行していると時々FCが暴走します。暴走すると、テレメトリーが失われたと送信機が話し、コントロールを失い、モーターが回りっぱなしになります。このため、ちょっと屋外飛行を躊躇しています。
手持ちの中で一番飛ばしやすい室内用ドローンであるInductrix FPV、長らく不調でしたがモーターを交換して復活しました。Angle mode限定ですが(というか、もうこの機体はAngle Modeだけで飛ばそうと思っています)、FPVで室内を自由自在に飛び回れるのが楽しい機体です。Tiny7も室内で飛ばしますが、今ひとつフィーリングが合いません。
そこで室内で、かつAngle Modeで試すことの出来るトリックであるNose In Yaw Spins(Orbitとかノーズインサークルとも呼ばれます)を練習することにしました。これは対象となる物をFPVカメラで捉え続けながら周りを旋回するテクニックです。通常の旋回とは違い横方向に移動しながら旋回するものです。
どうすれば実現できるかを説明するのは難しいですが、私が試した過程を簡単に書きます。
頭の中でスティック操作を考えてみる。左旋回を想定。FPVゴーグルを装着しての飛行です。
離れた場所から対象の右側にまっすぐ前進(エレベーターを前に倒している)
旋回軌道に入る手前くらいまで対象に近づいたら対象物が常にカメラ中央で捉えられようにラダーを左に倒し始める、エレベーターは調整しつつも少し前に倒したまま。
少し遅れてエルロンを右に少し倒すことにより旋回動作を始める。
カメラの画像を頼りに対象物との距離を一定に保つように各舵を調整しつつ旋回動作を続ける。
その通り実践。最初はエルロン操作がやや難しくて旋回に入らなかったりしましたが、エルロンを切り始めるタイミングを見失わなければ大丈夫です。数回の練習であっさりと出来るようになりました。
Angel modeだと割と簡単な気がします。Acro Modeではさらに複雑になると思います。想像では積極的なエレベーター操作が必要と思いますが、まだ実践できていません。
以下、スティック操作の様子も映しこんだ動画を添付しておきます。
VIDEO
– スティック操作は微妙すぎて良く分からないかもしれません。
FPVドローンの飛行をパソコン上で練習することが出来るシュミレーターアプリケーションを2つ紹介します。
[ ハードウェア環境 ] )とMacBook Pro(i7, Touch Bar無し2017)の両方を使用しています。今回は私の出張先での練習環境であるMacBook Proについて主に書いて行きます。
[ FPV Freeride ]
ゴーグルを接続してVGA画面になっている状態です
とりあえずシュミレーターを試してみたい場合、FPV FreeriderのDemo版であれば無料で試すことが出来るのでお勧めです。Demoではひとつのシーンしか使用できないだけで機能的には同じと思います。有料版の価格も4.99ドルと格安です。細かい設定などなく簡単に使用できます。
やや機体のレスポンスなどが緩めに設定されている気がします。そのため本物より飛ばしやすい気がします。逆に言うと初心者は、このアプリケーションから始めるのが取り組みやすいかも知れません。
Freeriderにはアンドロイド版もあるので携帯電話で楽しむことも出来ますが、本格的な練習の場合はパソコンの方が良いでしょう。
[ Liftoff ]
ゴーグルを接続しているのでVGA画面になっている。パソコン上では解像度は自由に選択できる。
Steam Liftoffはとても良くできたFPVシュミレーターです。機体の設定も実機と同じようにPIDやRateが変更出来ます。OSD画面もありますし、ゴーグルのノイズとか遠くに行った時に画像が乱れてくる様子とか、とにかく芸が細かいです。そのかわり動作が重くなるので、画面の解像度を下げたり画像エフェクトを減らしたりしないとMacBook Proでは快適に動きません。
舵がかなりシビアですので最初は思うように飛びません。少し操縦しやすくするためにコントローラーの設定でスティックのセンター付近の動きを無視するDeadbandを各舵に0.03ほど設定したり機体のフライトコントローラーの設定でレートを少し下げた状態から始めるのが良いでしょう。
[ Acro Modeでの練習方法 ]
– 実機もシュミレーターも同じで、まずはスロットルの感覚を掴むところから始めます。一定の高度を保つように努力します。Freeriderだと景色が頼りなので(実機でゴーグルを装着した場合も同じですが)、高度が上がりすぎると見極められませんので低い高度で安定することが重要です。
シュミレーターと実機の練習を交互に行うと効果的な気がします。
[ 関連記事 ] FPVシュミレーターのススメ設定編 -1- Freerider Windows用モデルの作成 (2019/01/25)FPVシュミレーターのススメ設定編 -2- Deviationのファームアップデート (2019/01/29)FPVシュミレーターのススメ設定編 -3- 送信機の無線接続 (2019/01/31)
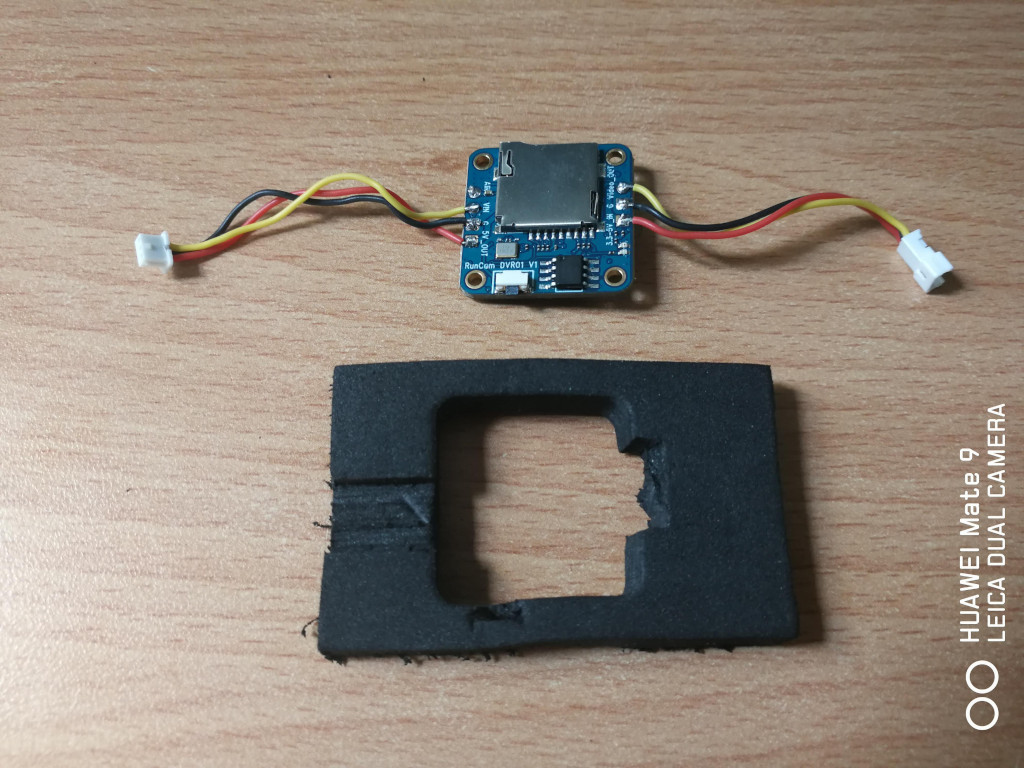
小型のFPVドローンにも搭載出来るオンボードの録画装置、RunCam Mini FPV DVRを試してみました。画面サイズはVGA(640×480)なのでHDという訳には行きません。テストにはFPV用としては一般的な性能である手持ちのFPVカメラを2つ使用しました。カメラの性能に引っ張られている気がしますがVGAの画質には及ばない結果でした。もっと性能の良いカメラが見つかったらまた試してみたいと思います。
使用したドローンは小型なWalkera Rodeo 110です。特別なマウントを作ることなくウレタンフォームで保護してバッテリーと一緒に縛りつけることにしました。実用上これで十分な気がします。
1. RunCam Micro Swift (1/3″ SONY Super HAD II CCD, 600VTL)
2. RunCam Nano (1/3″ CMOS Sensor, 650VTL)
実際の録画をご覧ください。VIDEO
左がJumper T8SG PLUS, 右がDevo10
FPVドローン用の送信機はWalkera Devo10を使用していて気に入ってはいますが、遠出をするときに大きくて重いところのが問題です。そこで入手したのは格安で小型軽量なJumper T8SG PLUSです。出張先にTiny7を持っていく時などにベストマッチです。
Devo10はマルチプロトコル化するためにDeviationというファームウェアに入れ替えた上にRFモジュールも交換しています。T8SGは、最初からDeviationが入っていてRFモジュールも各種プロトコルに対応したものが入っています。安いのに最強のマルチプロトコル送信機と言えます。
�ただし技適は今の所無いようですので日本では使用できません。マルチプロトコルでは無いモデルでT8MPが技適マークの付いてものがあるという話しですし、T8SG PLUSの技適取得の噂もあるので期待したいと思います。
ステックが安っぽく感じますが、実際に飛行させてみると問題はありません。PLUSはジンバルにホールセンサーを使用しているそうですので耐久性もあると思います。
Deviationですので設定はDevo10と同じです。色々なところで公開されているDevo+Deviation用のテンプレートも流用は出来ますがステイックの極性が違ったりスイッチの割当は全く違うので、それなりに調整が必要です。私の使用しているテンプレートを下に貼り付けて置きます。
Tiny7T8SG.ini – Tiny7用ですが7chの汎用設定として使えます。Ch5がSW GでARM用、Ch6に3ポジションのSW Aが割り当ててあります。もうひとつCh7にSW Hで私はAcro Trainer Modeに使用しています、またPitchとRollのスティック操作に合わせてThrottleを30%追加するようにMixerが設定されています。PitchとRoll操作で機体が浮き上がるようであれば調整が必要です。これは自分で作った設定です。(2018/07/20, ファイル名同じまま作り直し, スロットルがおかしくなることがあったのでリセットから設定しなおし+7CH化)
InductrixFPVT8SG.ini – Inductrix FPV専用です。Throttleのトリムを上にあげてStabilityモードとAcroモードの切り替えです。SW Aを中央にするとフルレート、その他の場所で70%のレートになります。どこかで出回っていたInduxtrixFPVテンプレートをT8SG用に調整したものです。
TinyWhoopの飛行中の動画をFatSharkのDVR機能で録画して公開していますが、どうせならもう少し綺麗な動画が撮りたいと思っていました。そのためには機体上にDVR機能を持たせるのが一番良いのです。究極はGoPro Hero5 Sessionを期待の上に乗せることですが、それなりの大きさの機体が必要です。小さい機体用として、今まで知っていたもっともコンパクトなDVR機能付きカメラはRunCam Split miniです。かなりコンパクトですが、普通のブラシモーターのTinyWhoopに載せるのは無理があります。と、あきらめていたところCYCLOPS 3 V3という素敵なDVR付きカメラがあることをFaceBookの投稿で知りました。
カメラの形状からしてTinyWhoop用な感じがします。とりあえずTiny7の予備のキャノピーに取り付けてみました。ちょっと奥まったところに付いてしまいましたが、まずはこれで飛ばしてみることにします。この位置では機体の映り込みは避けられませんが、それもTinyWhoopらしくて良いとも思えます。
気になる重量は1.2gの増加で済みました。飛行にはほとんど影響が無いものと思います。それより消費電力は確実に上がるでしょうから飛行時間は短かくなると思います。
実際に飛ばしてみると、ほぼオリジナルのTiny7と感覚的には同じでした。録画中であることはFPV画面で確認出来ます。スペック的には1080P/30FPSですが、カメラも小さいので画質についてはあまり期待しない方が良いです。FPVゴーグルで録画するよりは良いくらいに考えて置くべきです。
カメラを前方においてフレームが映らないカメラマウントも作成してみました。狙い通りに作成できましたが、どうもレンズ部分が緩んでしまったようでピンぼけになってしまいました。実験としては完了なので、また暇が出来たら組み直してみたいと思います。
VIDEO
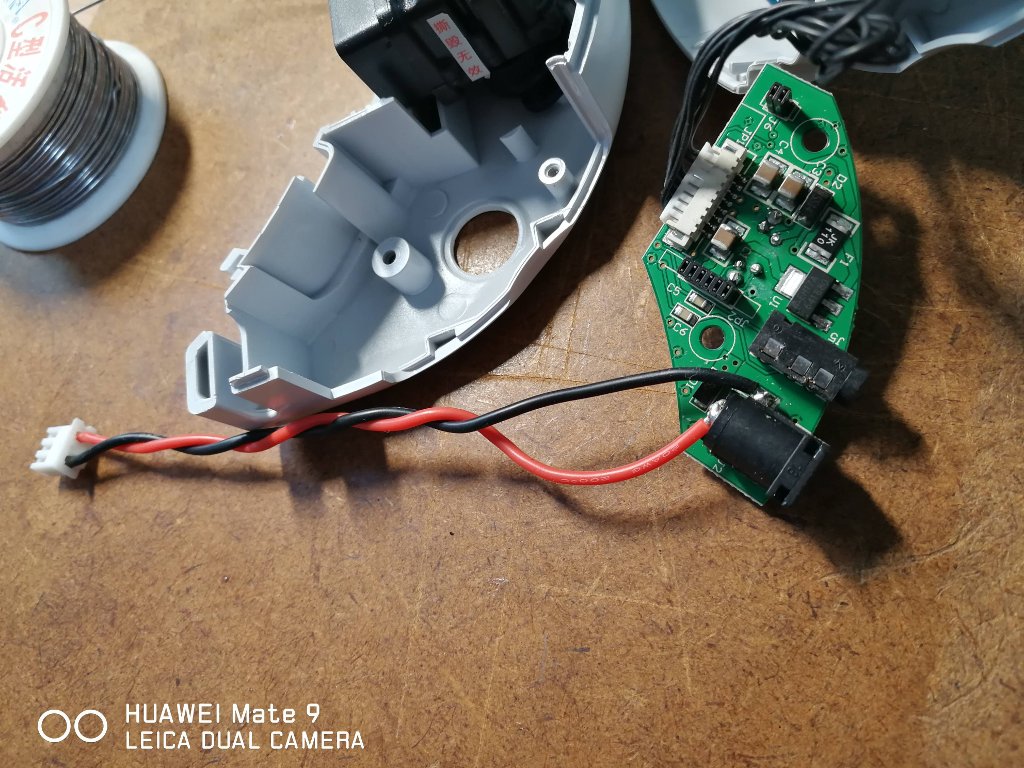
FPV飛行の強い味方FatShark Dominator V3のファンが回らなくなりました。断線した話などを見かけたのでファンの部分をばらしたりしましたが、結局はバッテリーの問題でした。このゴーグルのバッテリーからは二つの線が出ていて、ひとつは本体、もうひとつがファンに接続されます。単純にファンの方のコネクターに電圧が出なくなっていました。バッテリーをばらすのも今一つですし、世間で良く行われている本体の中からファンの電源を分岐する改造を行うことにしました。これは本体の電源コネクターに電源を供給したらついでにファンも回してしまえというものです。本体の許容電圧とファンの電圧が違うため、別々のコネクターになっているようです。2Sのバッテリーを使用する分には共通にしてしまっても問題はありません。外部電源を使用する時は要注意。
VIDEO
このビデオの主目的は特殊なレシーバーのためのケーブルの埋め込みですが、ついでにファンの電源ケーブルも取り付けています。分解の仕方も良くわかるので、これを参考に行いました。
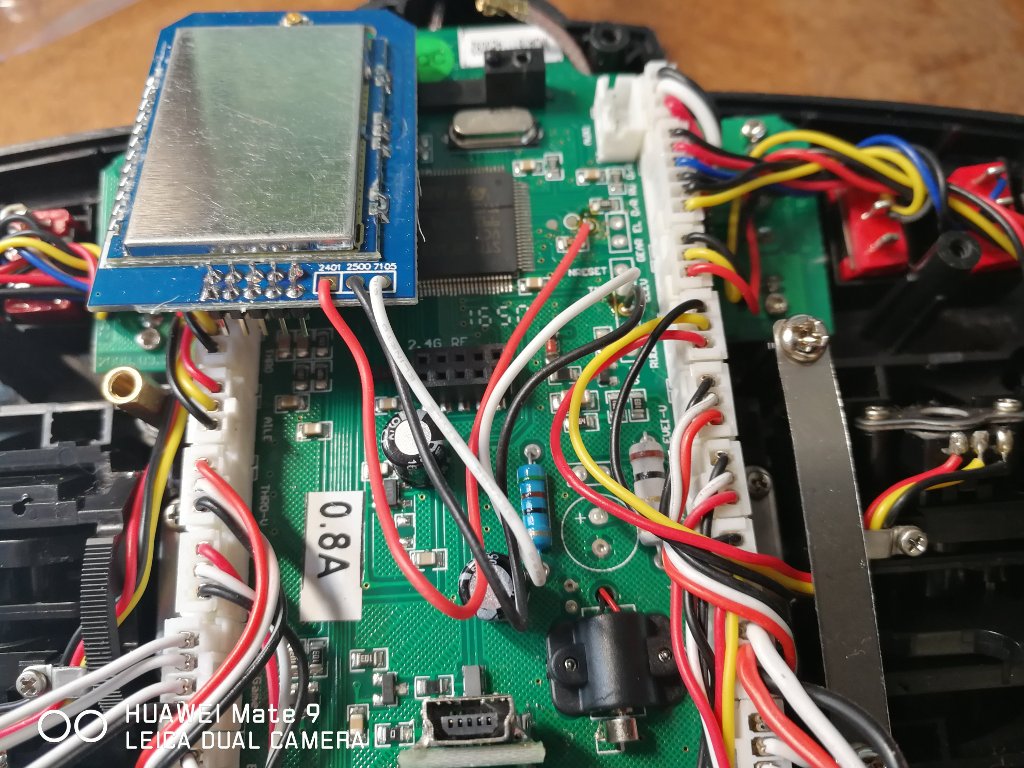
FPVドローンのRC、送信機はWalkera Devo10にDeviationファームウェアを入れたものを使用しています。これ一台でRodeo110と3機あるTinyWhoopすべてを操縦出来るのでとても重宝していますが、突然電波が止まってしまうようになりました。最初は電池が少なくなって電波が止まるのかと思っていたら、だんだん症状が悪化し電源入れてしばらくすると必ず電波が出なくなるようになりました。ディスプレイには何も異常を知らせるようにメッセージはありません。純粋に電波を発射するRFモジュールの故障のようです。
Walkeraから純正のRFモジュール も出ているので中国の通販サイトTAOBAOで探してみましたが、純正品は見つかりませんでした。代わりに四つの異なったRFモジュールが一体になった製品を購入しました。これはDeviationでより多くのプロトコルをサポートするためのものです。いずれ、この改造をしようと思っていたので渡りに船です。
あとはDeviation(v5.0.0)の内部のHARDWARE.INIを編集します。下のようにRFモジュールを使用するためにコメントを外します。(最初は以下のすべての行がコメントアウト(行頭にセミコロンがある)されていました)note: HARDWARE.INIはDEV10のENTを押しながら電源を上げてUSBケーブルをPCに接続すると見えるUSBドライブの中にあります。
[modules]
コメントにあるようにcyrf6936(DEVO10のオリジナルRFモジュール)の部分はコメントを外さなくても認識されます。残りのa7105, cc2500, nrf24l01のコメントを外して起動したところ、nrf24l01のモジュールが見つからないというメッセージが出て立ち上がらないのでコメントアウトしました。購入したモジュールの故障か、Deviationのバージョン、はたまたハードウェアの改造に足りないところがあるのか、今のところ不明です。とりあえず現在のところ必要はないので、そのままにしておきます。
これでCYRF6936, A7105, CC2500と3個のRFモジュールが使えるようになり使用できるプロトコル が増えました。
手持ちのレシーバーで今まで使用できていなかったFrSkyで構成してうまく動作することが確認できました。当然、今まで通りDSMXもDevoも使用できます。
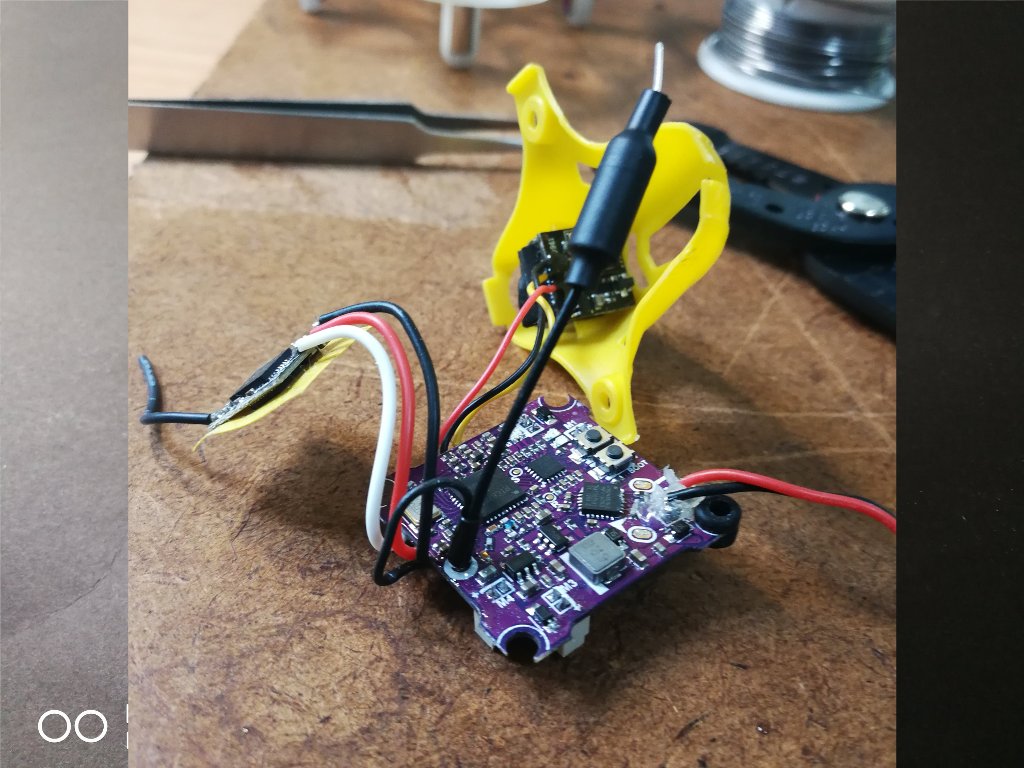
Kingkong/LDARC Tiny7の調整も落ち着いてきて、FPVでの室内飛行練習再開しました。しかしながら電波の飛びが操縦系、FPVとも良くないので家の中でさえ電波を失ってしまいます。Induxtrix FPVだと、まったく問題なく家の中をどこでも飛び回る事ができます。ということでTiny7の改造です。
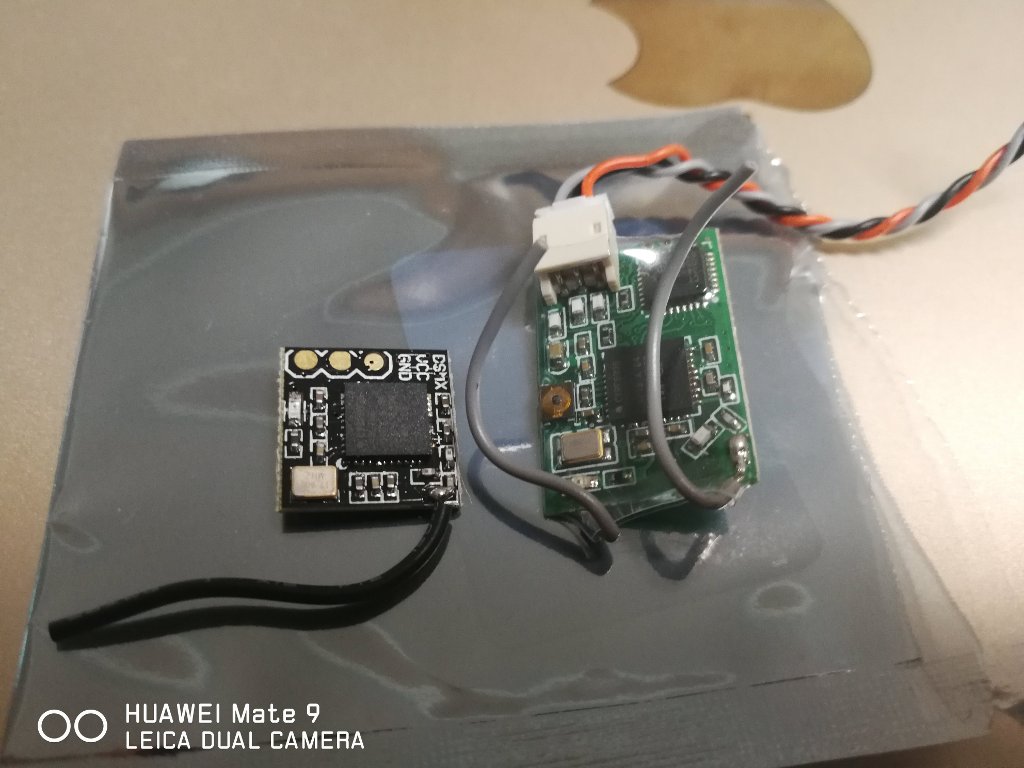
[ レシーバー ]
[ FPVアンテナの交換 ]
いつも通りの設定にOSDとブザーが増えただけと思ったら、色々と新しい体験がありました。
[ レシーバーの設定とバインド ]
バインドのやり方は特別ではありませんがDMSXのバインドをコマンドだけで行うのは初めてでした。以下、手順です。set spektrum_sat_bind=9を投入、続いてsaveを投入set spektrum_sat_bind=0を投入、続いてsaveを投入
[ OSD ]
[ ブザー ]
[ Betaflight configuration ]
[ ファームウェアのアップデート ]
OMINIBUSはTiny7で使用していたSPACINGF3とは違ってBOOT/DFUモードでファームウェアを書き込む必要があります。ImpulseRC Driver Fixer Tool をBOOTモードでUSB接続した状態で実行したらDFUドライバーが導入出来ました。詳しくは参考にした「FPVドローラボ 」さんをご覧ください。