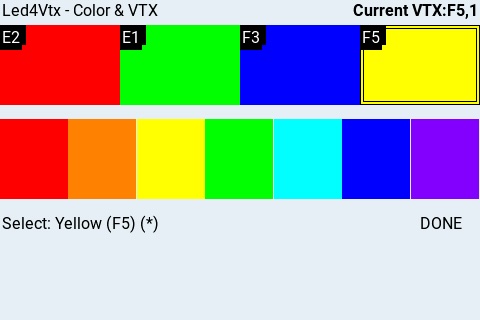
現在タイニードローンのレースや練習会で使用されている4波のチャネルにはいくつかの組み合わせがあります。中には3波の頃に行っていたVTXチャネル連動のLEDの色変更が使える組み合わせもあります。下の動画のようにVXTXチャネルを何等かの方法で設定するだけでBetaflightが対応する色を自動的に設定してくれるというものです。
[ 実際に使用されている4波の組み合わせ例 ]
1. (E2)5685[LED2], (A8)5725[LED3], (A5)5785[LED4], (A4)5805[LED6]
2. (E1)5705[LED2], (A8)5725[LED3], (A5)5785[LED4], (F5)5820[LED6]
3. (E2)5685[LED2], (E1)5705[LED2], (F3)5780[LED4], (F5)5820[LED6]
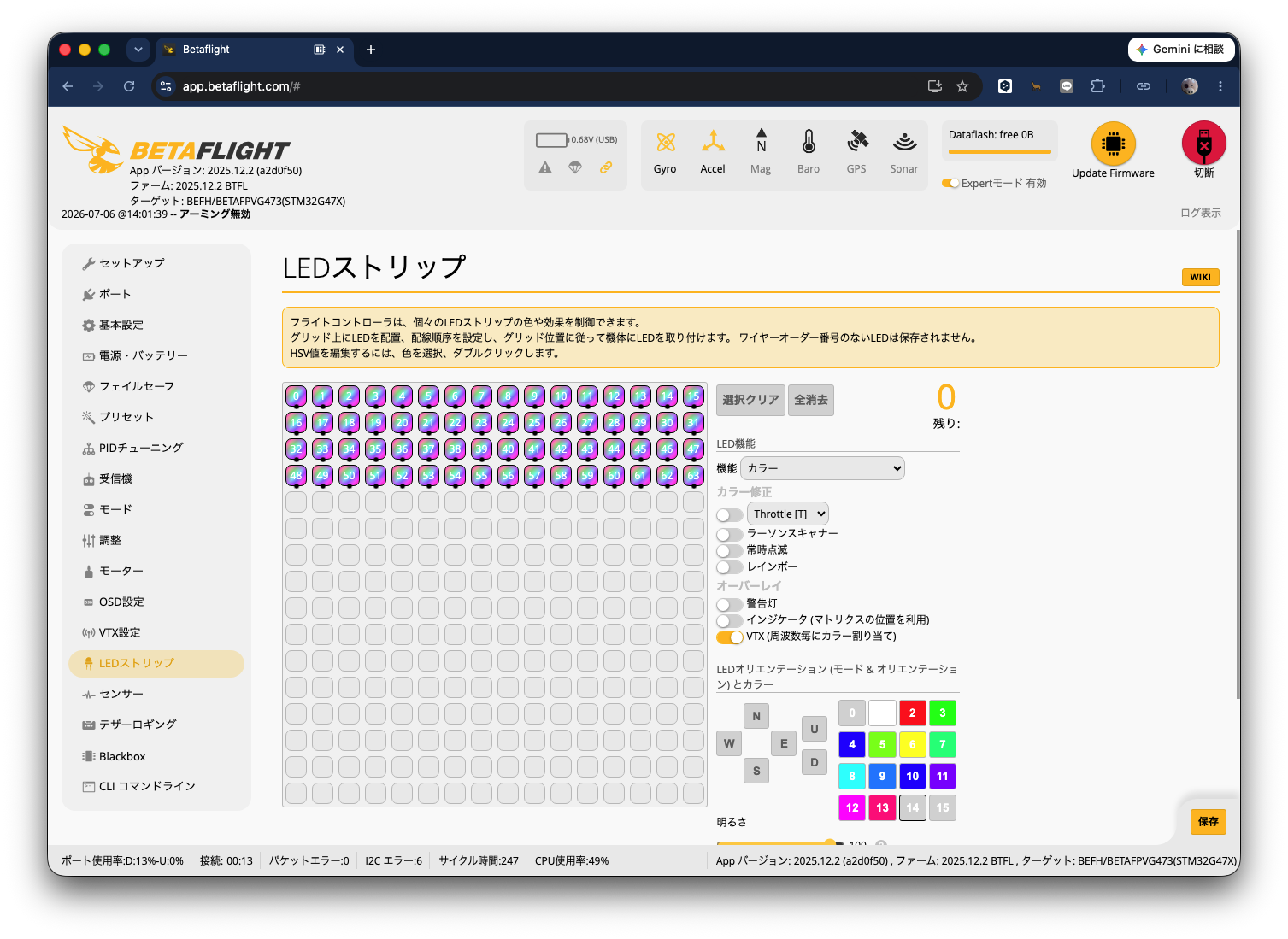
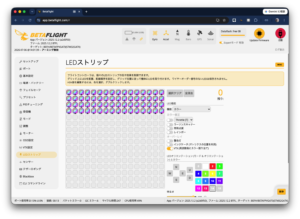
この表記は私の https://github.com/nkozawa/IMDAvoider3 で使用しているものです。チャネルと周波数は説明の必要がないと思います。それに続くLED2などと書かれているのがこの説明のキーポイントです。これはLEDストリップ画面にあるラーパレットの番号です。

この画面の数値の部分です。周波数とパレットの番号の関連付けはRacebandを基準にBetaflightの内部で固定的に決められています。詳しくはSetting LED color to the VTx Frequencyをご覧ください。
4波の組み合せ例に戻ると、例の1と2は、LED2,LED3,LED4,LED6と別々のパレットが使われます。反して、例3ではLED2が2回現れます。
< 例1と例2 > チャネル毎に違うパレットが選ばれるためVTXチャネルによるLEDの色変更が可能です。
< 例3 > E2とE1が同じパレットを使用するため、ここで紹介する設定は使用出来ません。VTXチャネルとLEDの色を個別に設定しないといけません。別々の設定をスクリプトで一度に行おうという試みについては「LEDの色とVTXチャネルを同時に設定するLuaスクリプト」をご覧ください。
[ 設定 ]
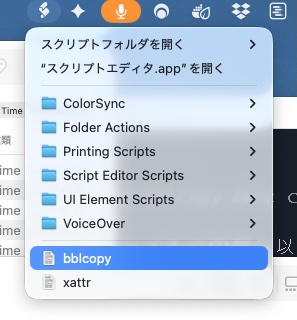
ここからが本編です。VTXチャネルの組み合わせを全部調べた訳ではありませんが、おそらくLEDカラーパレット2, 3, 4, 6でほぼ網羅出来ると思います。以下、このパレットを使用する設定です。
LEDストリップ画面で設定する場合は上のようになります。カラーパレットの2, 3, 4, 6番の設定は以下の通りです。
| パレット番号 |
色 |
H |
S |
V |
| 2 |
Red |
0 |
0 |
255 |
| 3 |
Green |
120 |
0 |
255 |
| 4 |
Blue |
240 |
0 |
255 |
| 6 |
Yellow |
60 |
0 |
255 |
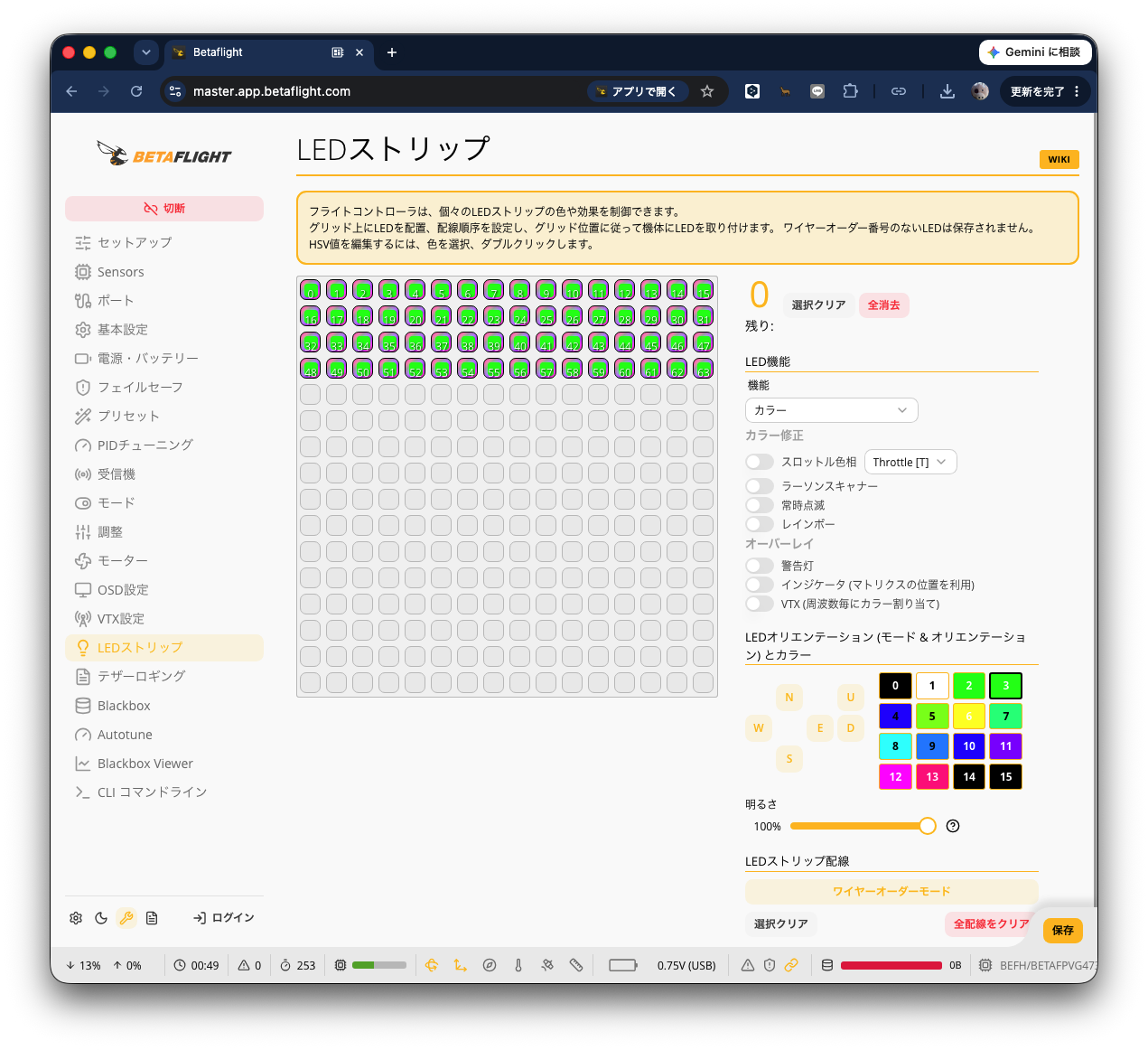
プリセットも用意しました。


CLI用のコマンドは以下の通りです。
#--- Set up status mode ---
feature LED_STRIP
set ledstrip_profile = STATUS
# --- Set LED ---
# led
led 0 0,0::CV:14
led 1 1,0::CV:14
led 2 2,0::CV:14
led 3 3,0::CV:14
led 4 4,0::CV:14
led 5 5,0::CV:14
led 6 6,0::CV:14
led 7 7,0::CV:14
led 8 8,0::CV:14
led 9 9,0::CV:14
led 10 10,0::CV:14
led 11 11,0::CV:14
led 12 12,0::CV:14
led 13 13,0::CV:14
led 14 14,0::CV:14
led 15 15,0::CV:14
led 16 0,1::CV:14
led 17 1,1::CV:14
led 18 2,1::CV:14
led 19 3,1::CV:14
led 20 4,1::CV:14
led 21 5,1::CV:14
led 22 6,1::CV:14
led 23 7,1::CV:14
led 24 8,1::CV:14
led 25 9,1::CV:14
led 26 10,1::CV:14
led 27 11,1::CV:14
led 28 12,1::CV:14
led 29 13,1::CV:14
led 30 14,1::CV:14
led 31 15,1::CV:14
led 32 0,2::CV:14
led 33 1,2::CV:14
led 34 2,2::CV:14
led 35 3,2::CV:14
led 36 4,2::CV:14
led 37 5,2::CV:14
led 38 6,2::CV:14
led 39 7,2::CV:14
led 40 8,2::CV:14
led 41 9,2::CV:14
led 42 10,2::CV:14
led 43 11,2::CV:14
led 44 12,2::CV:14
led 45 13,2::CV:14
led 46 14,2::CV:14
led 47 15,2::CV:14
led 48 0,3::CV:14
led 49 1,3::CV:14
led 50 2,3::CV:14
led 51 3,3::CV:14
led 52 4,3::CV:14
led 53 5,3::CV:14
led 54 6,3::CV:14
led 55 7,3::CV:14
led 56 8,3::CV:14
led 57 9,3::CV:14
led 58 10,3::CV:14
led 59 11,3::CV:14
led 60 12,3::CV:14
led 61 13,3::CV:14
led 62 14,3::CV:14
led 63 15,3::CV:14
# color
color 2 0,0,255
color 3 120,0,255
color 4 240,0,255
color 6 60,0,255