2026年、WTW四国ではいよいよ4波対応を推進いたします。全周LEDを装着しレーサー毎に指定の色で光らせてもらうことも目指します。LEDの色は四国では赤、緑、青、黄を使用することにしています。
現在のところVTXチャネルとLEDの色は別々に設定することになります。それに沿って今まで書いた設定方法をまとめて起きます。
[ 基本設定 ]
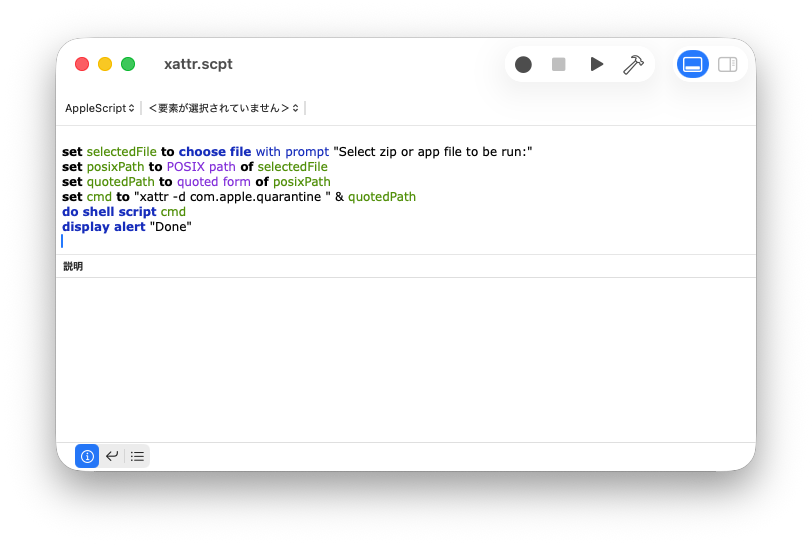
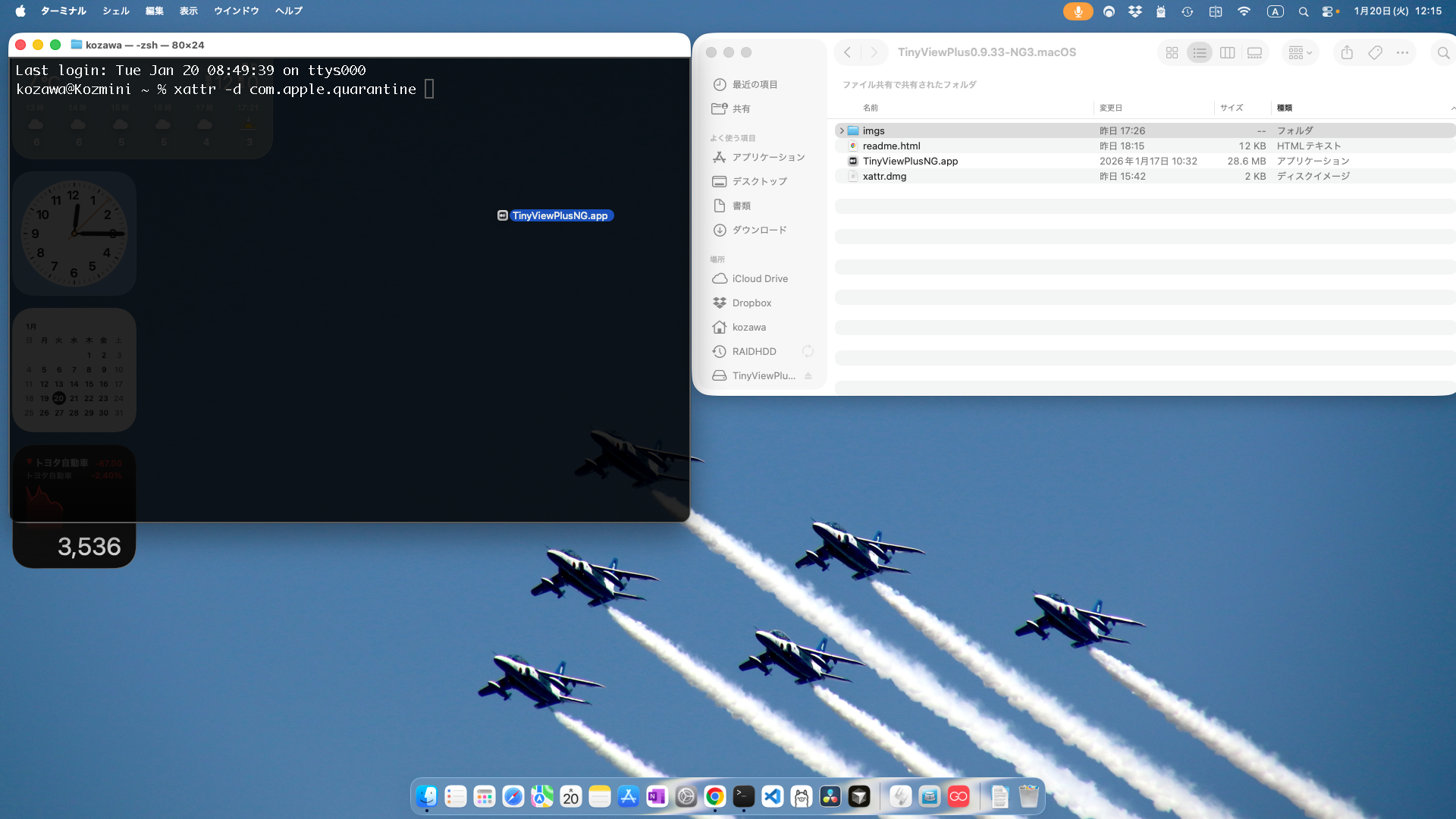
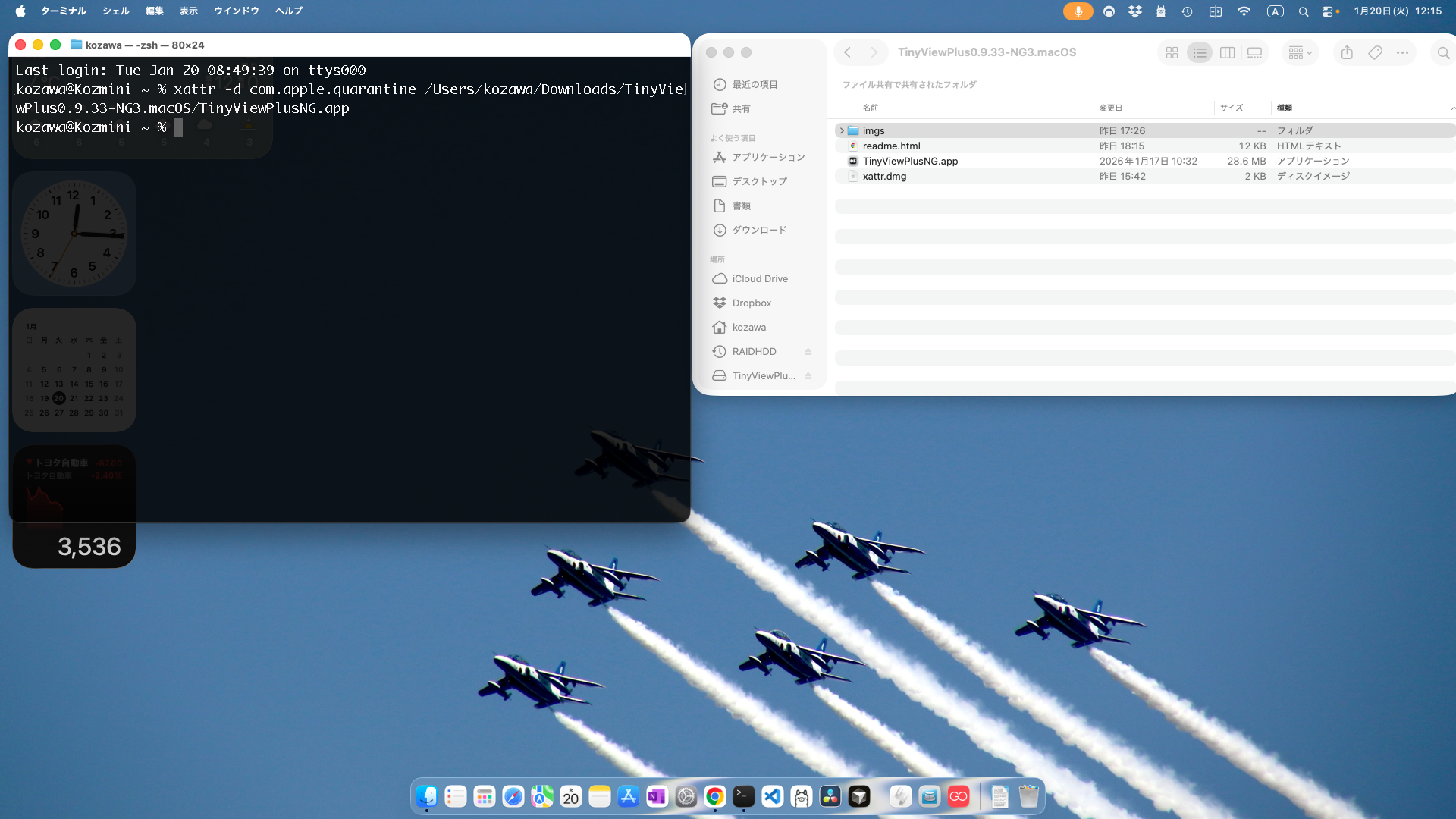
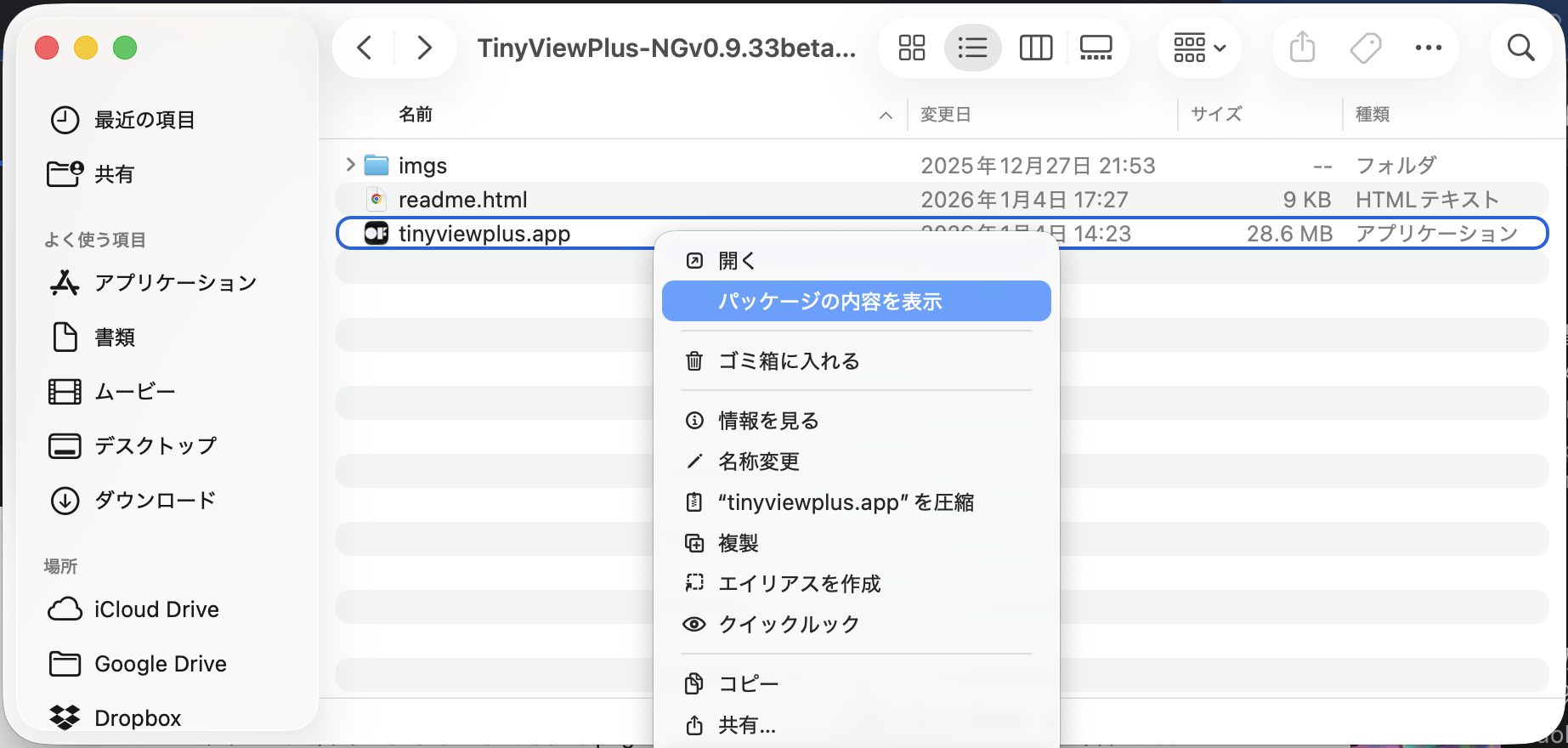
– 「FPVドローンのLED実装、ハードウェアとBetaflightのビルド」
LEDストリップの取り付けとLEDを使用するためのファームウェア設定です。
[ Betaflightの設定 ]
– BetaflighのLED設定を行うプリセットを作りました
最初はCLIに流し込むコマンドだけを各記事で紹介しましたが、Betaflight Configuratorのプリセット画面で設定する方法も用意しました。オプションで設定内容を変更できるので単純なCLIコマンドより便利です。
– 「OSD menuでLEDの色を変更する」
LEDの設定には様々なオプションがありますが、その中のレースプロファイルを用いた設定例です。この設定では全てのLEDを同じ色で光らせることが出来ます。設定できる色は以下の通りです。
BLACK, WHITE, RED, ORANGE, YELLOW, LIME_GREEN, GREEN, MINT_GREEN, CYAN, LIGHT_BLUE, BLUE, DARK_VIOLET, MAGENTA, DEEP_PINK
– 「LEDの色変更をCLIで行う」
内容は、ほとんど上のOSD menuを使う方法と同じです。
– 「4波対応-プロポのポット(S1, S2)でLED色を変更する」
プロポのS1,S2スイッチでLED色を変更する方法です。
– 「LEDの色変更を6p SWで」
ninjaMoonLightさんによるプロポの6posスイッチでLED色を変更する方法です。
– 「LEDの色変更をVTX周波数連動と手動設定の併有を試す」
以前、行っていたVTX連動によるLEDの色変更とOSD menuによる色変更を併用したらレースの時の手間が減らせるのではないかという試みです。
– 「S1ポッドでLEDを決まった色にする設定」
レース向け設定です。S1を回して色を変更しますが赤、黄、緑、青だけを出すようにします。
[ 例外事例 ]
– 「Hummingbird V3.1 RaceSpecのLED Strip設定とその他諸々」
箱出しレース機Hummingbird RaceSpecはLEDの接続が正式にはサポートされていません。が、隠れLEDポートが存在します。もし動いたらラッキーくらいに考えておいてください。ファームウェアもカスタム品なので、もしファームウェアレベルでLEDサポートが落とされたらどうしようもないです。
– LEDつないだらモーターが動かなくなった時(Betaflight)
もう生き残っているのは無いかもしれないくらい古いBetaFPVのFCの話しです。
[ Betaflightを使わないLEDの実装方法 ]
FCにLEDパッドが無い、あるいは動かない場合、独立したICでLEDを制御する方法もあります。
– 「ATtiny85によるLED制御 – ハードウェア実装編(統一チップ版)」